一种应用于智慧物流的分拣机器人及其使用方法
本发明涉及分拣机器人,具体为一种应用于智慧物流的分拣机器人及其使用方法。
背景技术:
1、物流分拣主要负责快件的分拣、扫描、建包等工作,分拣设备主要应用于机场,卷烟厂及烟草仓储物流和邮政分拣系统的所有输送系统。物料信息被读入计算机系统后,在主输送线上继续移动,仓储货架分拣系统实时检测物料移动的位置,当物料到达相应的分拣道口时,控制系统向分类机构发出分拣的指令,分类机构立刻产生相应的动作,使物料进入相应的分拣道口,这一过程称为分流,自动分拣机是提高物流配送效率的一项关键因素。货物安全:使用设备分拣货物,能确保货物分拣安全,同时也能保证货物分拣正确。
2、现如今物流分拣装置通过分类机构可以对物流进行分拣,分拣过程中一些物流包裹在运输期会发生损坏,损坏的包装会使得内部的物品裸露在外面,如物流包裹碎裂内部的物品会掉落出来,对于该包装破损和物品丢失的包裹需要单独进行处理,但是现有的分拣装置并未能对物流包装进行查验,查验是否发生损坏,在未经查验的包裹中存在部分空包裹,这些空包裹在后期物流运输时反而会占用运输资源。为此,提出一种应用于智慧物流的分拣机器人及其使用方法。
技术实现思路
1、为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
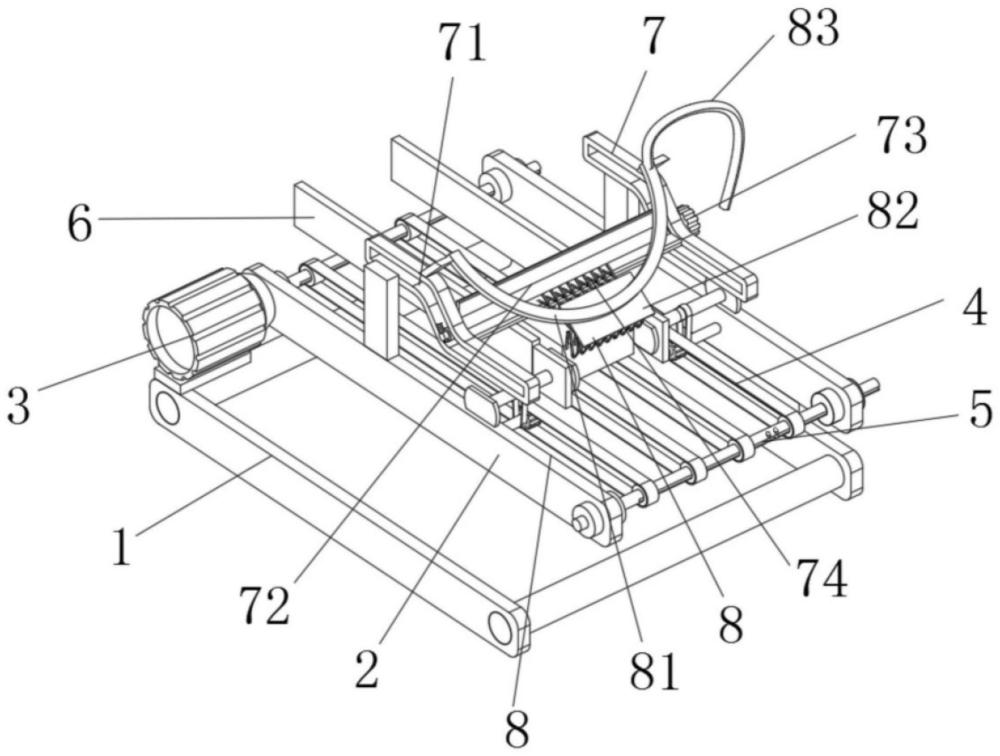
2、本发明解决其技术问题所采用的技术方案是:一种应用于智慧物流的分拣机器人,包括底架,所述底架的顶部连接有传送支架,所述传送支架的上端安装有第一电机,所述第一电机的输出端连接有传动杆,所述传动杆嵌设在传送支架的内部,所述传动杆上安装有输送带,所述传送支架上还设置有导流板,所述传送支架的顶端连接有拨动机构,所述拨动机构的上端连接有投射机构,所述传送支架的上端设置有翻转机构;
3、所述拨动机构包括有限位架,所述传送支架的顶端连接有限位架,所述限位架的一侧安装有第二电机,所述第二电机的输出端固定连接有拨架,所述拨架的上端连接有拨动杆;
4、所述投射机构包括有弧形架,所述限位架的上端连接有弧形架,所述弧形架的上端连接有投射灯,所述投射灯的上端连接有数据线;
5、所述翻转机构包括有固定杆,所述传送支架的顶端连接有固定杆,所述固定杆的一侧连接有翻转块,所述翻转块的上端连接有传动带,所述传送支架的内部还嵌入有助力杆,所述助力杆的顶端连接有传动轮,所述传动轮啮合在输送带的内壁底侧;
6、所述限位架和第二电机之间固定连接在一起,所述拨架和限位架之间转动连接,所述拨架嵌设在两组限位架之间;所述拨动杆为金属材质制成的,所述拨动杆和拨架之间固定连接,且拨动杆固定在助力杆的中间位置;
7、所述传送支架的下方设置有杂物收集盒。
8、优选的,所述投射灯的上端连接有网格状的激光射灯,所述投射灯的上端还连接有摄像机构,其中摄像机构包括摄像头和主控电路板。
9、优选的,所述物流包裹嵌设在导流板的内部,所述翻转块夹持在物流包裹的两侧。
10、优选的,所述传动轮嵌设在输送带的内部,所述传动轮的一侧表面嵌设在输送带的内侧的底端并和输送带的内侧相啮合。
11、优选的,所述拨动杆覆盖在投射灯的底端,所述拨动杆的下端抵触在物流包裹的上端。
12、优选的,所述翻转块和固定杆之间转动连接,所述翻转块贯穿导流板的外侧直至延伸到导流板的内侧,所述翻转块分为两组,两组翻转块相互对应设置在两组导流板的上端。
13、优选的,所述翻转块和助力杆之间通过传动带相连接,所述传动带远离翻转块的一端连接在助力杆的上端。
14、一种应用于智慧物流的分拣机器人使用方法,其特征在于,包括具体以下步骤:
15、s1、在物流包裹输送中,通过将物流包裹放置到输送带的上端,通过输送带即可不断地向导流板的内部输送包裹,包裹经过输送带和传动杆的转动进行运输;
16、s2、为了使得监测期间物流包裹的定位,通过拨动杆对物流包裹进行拦截,拦截后确立包裹的完整性后,通过第二电机的转动带动了拨架随着带动了拨动杆的上升,上升后随着输送带的转动继续进行物流包裹的输送;
17、s3、在包裹经过投射灯的底端时,由投射灯上端的激光射灯可投射处网状的可见光,这类可见光呈线状水平和纵向分布构成网格状,光线投射在物流包裹的上端后,会在物流包裹的上端进行反射,这时通过投射灯上端的摄像头可对这些反射光进行采集,采集会通过反射光的形状来确立物流包裹的完整性,当物流包裹的上端如出现破损时,例如孔洞,则光线就会通过通孔投射到物流包裹的内部,这样在物流包裹表面形成的可见光反射的光线就会出现残次,因此网格状的灯光投射在物流包裹上端就会出现残次,这时则会被摄像装置采集到,并通过电脑进行网格图像的分析,分析处理后通过液压装置将该装置推动出输送带的上端进行集中处理;
18、s4、为了让投射灯上端的摄像装置可以检测到物流包裹的不同表面,通过拨动杆进行阻挡后输送带转动会带动了传动轮进行转动,当传动轮发生转动后则会驱使了传动带进行转动,当传动带进行转动后带动了翻转块进行转动,翻转块贴合到物流包裹的两侧,驱使了物流包裹进行翻转,并在输送带的推动下以及拨动杆对物流包裹上端的阻挡,使得物流包裹在输送带的上端进行翻滚,翻滚期间对物流包裹的不同表面进行检测,检测无破碎则拨动杆上提,这样在翻转块的翻转下辅助推动了物流包裹移动,完成对物流包裹的输送。
19、与现有技术相比,本发明的有益效果如下:
20、本发明提供的一种应用于智慧物流的分拣机器人,通过设置有弧形架和投射灯可以将网格状的可见光投射到物流包裹上,后通过拨动杆辅助了翻转块对物流包裹进行翻转,翻转后通过拨动杆按压包裹,可以通过按压来进一步的检测包裹的开口,当通过投射灯投射到的可见光发生了残缺时,光源透过通孔直接直射到包裹的内部时,则可以通过摄像检测装置对该包裹进行查验,因此在破碎包裹的查验中,通过对包裹的翻转来检测包裹外包装,将破损的包裹查验出来进行集中的处理,在后期的物流运输中减少了损坏包裹占用物流资源。并且,物流包裹在输送和分拣的过程中,产生的灰尘和杂质会掉落在下方的杂物收集盒中进行收集处理,保证了现场环境卫生。
技术特征:
1.一种应用于智慧物流的分拣机器人,包括有底架(1),其特征在于:所述底架(1)的顶部连接有传送支架(2),所述传送支架(2)的上端安装有第一电机(3),所述第一电机(3)的输出端连接有传动杆(5),所述传动杆(5)嵌设在传送支架(2)的内部,所述传动杆(5)上安装有输送带(4),所述传送支架(2)上还设置有导流板(6),所述传送支架(2)的顶端连接有拨动机构(7),所述拨动机构(7)的上端连接有投射机构(8),所述传送支架(2)的上端设置有翻转机构(9);
2.根据权利要求1所述的一种应用于智慧物流的分拣机器人,其特征在于:所述投射灯(82)的上端连接有网格状的激光射灯,所述投射灯(82)的上端还连接有摄像机构,其中摄像机构包括摄像头和主控电路板。
3.根据权利要求2所述的一种应用于智慧物流的分拣机器人,其特征在于:所述导流板(6)的内部嵌入有物流包裹(96),所述翻转块(94)夹持在物流包裹(96)的两侧。
4.根据权利要求3所述的一种应用于智慧物流的分拣机器人,其特征在于:所述传动轮(93)嵌设在输送带(4)的内部,所述传动轮(93)的一侧表面嵌设在输送带(4)的内侧的底端并和输送带(4)的内侧相啮合。
5.根据权利要求4所述的一种应用于智慧物流的分拣机器人,其特征在于:所述拨动杆(74)覆盖在投射灯(82)的底端,所述拨动杆(74)的下端抵触在物流包裹(96)的上端。
6.根据权利要求5所述的一种应用于智慧物流的分拣机器人,其特征在于:所述翻转块(94)和固定杆(91)之间转动连接,所述翻转块(94)贯穿导流板(6)的外侧直至延伸到导流板(6)的内侧,所述翻转块(94)分为两组,两组翻转块(94)相互对应设置在两组导流板(6)的上端。
7.根据权利要求6所述的一种应用于智慧物流的分拣机器人,其特征在于:所述翻转块(94)和助力杆(92)之间通过传动带(95)相连接,所述传动带(95)远离翻转块(94)的一端连接在助力杆(92)的上端。
8.根据权利要求1-7任意一项所述的一种应用于智慧物流的分拣机器人使用方法,其特征在于,包括具体以下步骤:
技术总结
本发明公开了一种应用于智慧物流的分拣机器人,通过设置有弧形架和投射灯可以将网格状的可见光投射到物流包裹上,后通过拨动杆辅助了翻转块对物流包裹进行翻转,翻转后通过拨动杆按压包裹,可以通过按压来进一步的检测包裹的开口,当通过投射灯投射到的可见光发生了残缺时,光源透过通孔直接直射到包裹的内部时,则可以通过摄像检测装置对该包裹进行查验,因此在破碎包裹的查验中,通过对包裹的翻转来检测包裹外包装,将破损的包裹查验出来进行集中的处理,在后期的物流运输中减少了损坏包裹占用物流资源。并且,物流包裹在输送和分拣的过程中,产生的灰尘和杂质会掉落在下方的杂物收集盒中进行收集处理,保证了现场环境卫生。
技术研发人员:施颖,崔天旭,丁日佳,许相东,郝素利,胡心如,郝伟怡
受保护的技术使用者:中国矿业大学(北京)
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!