一种智能排除大块矸石方法和系统与流程
本发明提出了一种智能排除大块矸石方法和系统,属于大块矸石排除。
背景技术:
1、通过过滤筛、粉碎机、人工排查等手段对大块矸石进行排除,存在效率低、生产影响大的情况,人工处理速度有限,过滤筛、粉碎机等设备无法实现对矸石的有效处理,影响生产进度,且粉碎机较为危险,存在安全隐患。
技术实现思路
1、本发明提供了一种智能排除大块矸石方法和系统,用以解决通过过滤筛、粉碎机、人工排查等手段对大块矸石进行排除,存在效率低、生产影响大的情况,人工处理速度有限,过滤筛、粉碎机等设备无法实现对矸石的有效处理,影响生产进度,且粉碎机较为危险,存在安全隐患的问题:
2、一种智能排除大块矸石方法,所述智能排除大块矸石方法包括:
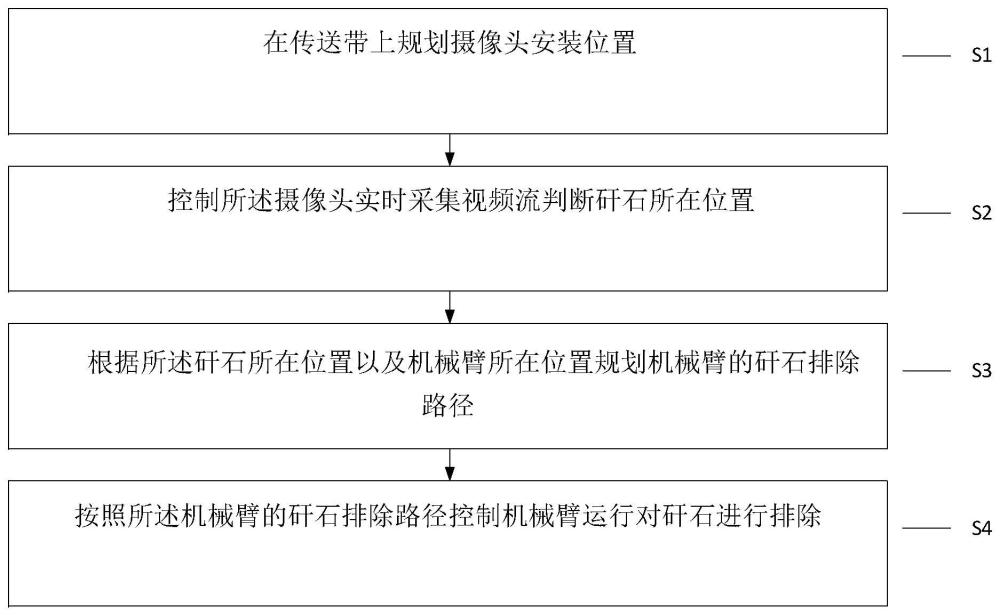
3、在传送带上规划摄像头安装位置;
4、控制所述摄像头实时采集视频流判断矸石所在位置;
5、根据所述矸石所在位置以及机械臂所在位置规划机械臂的矸石排除路径;
6、按照所述机械臂的矸石排除路径控制机械臂运行对矸石进行排除。
7、进一步地,在传送带上规划摄像头安装位置,包括:
8、提取所述摄像头的初始视野覆盖区域面积;
9、提取所述摄像头对应的目标区域面积;
10、将所述摄像头的初始视野覆盖区域面积和摄像头对应的目标区域面积进行比较,获得比较结果;
11、根据所述比较结果设置所述摄像头对应的视野覆盖目标区域面积;
12、对所述摄像头进行视野覆盖区域面积调节使所述摄像头进行视野覆盖区域面积与所述视野覆盖目标区域面积保持一致。
13、进一步地,根据所述比较结果设置所述摄像头对应的视野覆盖目标区域面积,包括:
14、当所述摄像头的初始视野覆盖区域面积大于所述摄像头对应的目标区域面积时,获取摄像头对应的第一视野覆盖目标区域面积;
15、当所述摄像头的初始视野覆盖区域面积小于或等于所述摄像头对应的目标区域面积时,获取摄像头对应的第二视野覆盖目标区域面积;
16、其中,所述第一视野覆盖目标区域面积和第二视野覆盖目标区域面积通过如下公式获取:
17、s01=(1+sqrt[ln[1+exp[(sf-s0)/(sf-sc)]])×s0
18、其中,s01表示第一视野覆盖目标区域面积;sf表示所述摄像头初始化对应的视野覆盖区域的范围面积;s0表示所述摄像头对应的目标区域范围面积;exp表示指数函数;sc表示传送带在所述初始视野覆盖区域面积所占面积;
19、s02=(1+sqrt[ln[1+exp[(s0-sf)/(sf-sc)]])×s0
20、其中,s02表示第二视野覆盖目标区域面积;sf表示所述摄像头初始化对应的视野覆盖区域的范围面积;s0表示所述摄像头对应的目标区域范围面积;exp表示指数函数;sc表示传送带在所述初始视野覆盖区域面积所占面积。
21、进一步地,控制所述摄像头实时采集视频流判断矸石所在位置,包括:
22、控制所述摄像头实时采集视频流数据;
23、针对所述视频流数据进行帧图像处理,获得所述视频流对应的帧图像;
24、将所述帧图像输入至用于识别矸石的深度学习模型;
25、通过所述深度学习模型获取矸石的位置。
26、一种智能排除大块矸石系统,所述智能排除大块矸石系统包括:
27、安装位置规划模块,用于在传送带上规划摄像头安装位置;
28、位置采集模块,用于控制所述摄像头实时采集视频流判断矸石所在位置;
29、排除路径规划模块,用于根据所述矸石所在位置以及机械臂所在位置规划机械臂的矸石排除路径;
30、矸石排除执行模块,用于按照所述机械臂的矸石排除路径控制机械臂运行对矸石进行排除。
31、进一步地,所述安装位置规划模块包括:
32、初始视野覆盖区域面积提取模块,用于提取所述摄像头的初始视野覆盖区域面积;
33、目标区域面积提取模块,用于提取所述摄像头对应的目标区域面积;
34、面积比较模块,用于将所述摄像头的初始视野覆盖区域面积和摄像头对应的目标区域面积进行比较,获得比较结果;
35、区域面积设置模块,用于根据所述比较结果设置所述摄像头对应的视野覆盖目标区域面积;
36、面积调节模块,用于对所述摄像头进行视野覆盖区域面积调节使所述摄像头进行视野覆盖区域面积与所述视野覆盖目标区域面积保持一致。
37、进一步地,所述区域面积设置模块包括:
38、第一视野覆盖目标区域面积获取模块,用于当所述摄像头的初始视野覆盖区域面积大于所述摄像头对应的目标区域面积时,获取摄像头对应的第一视野覆盖目标区域面积;
39、第二视野覆盖目标区域面积获取模块,用于当所述摄像头的初始视野覆盖区域面积小于或等于所述摄像头对应的目标区域面积时,获取摄像头对应的第二视野覆盖目标区域面积;
40、其中,所述第一视野覆盖目标区域面积和第二视野覆盖目标区域面积通过如下公式获取:
41、s01=(1+sqrt[ln[1+exp[(sf-s0)/(sf-sc)]])×s0
42、其中,s01表示第一视野覆盖目标区域面积;sf表示所述摄像头初始化对应的视野覆盖区域的范围面积;s0表示所述摄像头对应的目标区域范围面积;exp表示指数函数;sc表示传送带在所述初始视野覆盖区域面积所占面积;
43、s02=(1+sqrt[ln[1+exp[(s0-sf)/(sf-sc)]])×s0
44、其中,s02表示第二视野覆盖目标区域面积;sf表示所述摄像头初始化对应的视野覆盖区域的范围面积;s0表示所述摄像头对应的目标区域范围面积;exp表示指数函数;sc表示传送带在所述初始视野覆盖区域面积所占面积。
45、进一步地,所述位置采集模块包括:
46、视频流数据采集模块,用于控制所述摄像头实时采集视频流数据;
47、帧图像处理模块,用于针对所述视频流数据进行帧图像处理,获得所述视频流对应的帧图像;
48、图像数据输入模块,用于将所述帧图像输入至用于识别矸石的深度学习模型;
49、位置信息获取模块,用于通过所述深度学习模型获取矸石的位置。
50、本发明有益效果:
51、本发明提出的一种智能排除大块矸石方法和系统在传送带上方安装摄像头以监控煤流的情况,通过视频算法检测和识别图像中的矸石,系统根据煤矸石的位置规划机械臂的路径,以便准确地抓取并清理矸石。通过机械臂和视频算法来清理大块矸石可以显著提高矿业生产效率,减少人员受到潜在危险的风险,同时减少人工成本。
技术特征:
1.一种智能排除大块矸石方法,其特征在于,所述智能排除大块矸石方法包括:
2.根据权利要求1所述智能排除大块矸石方法,其特征在于,在传送带上规划摄像头安装位置,包括:
3.根据权利要求2所述智能排除大块矸石方法,其特征在于,根据所述比较结果设置所述摄像头对应的视野覆盖目标区域面积,包括:
4.根据权利要求1所述智能排除大块矸石方法,其特征在于,控制所述摄像头实时采集视频流判断矸石所在位置,包括:
5.一种智能排除大块矸石系统,其特征在于,所述智能排除大块矸石系统包括:
6.根据权利要求5所述智能排除大块矸石系统,其特征在于,所述安装位置规划模块包括:
7.根据权利要求6所述智能排除大块矸石系统,其特征在于,所述区域面积设置模块包括:
8.根据权利要求5所述智能排除大块矸石系统,其特征在于,所述位置采集模块包括:
技术总结
本发明提出了一种智能排除大块矸石方法和系统。所述智能排除大块矸石方法包括:在传送带上规划摄像头安装位置;控制所述摄像头实时采集视频流判断矸石所在位置;根据所述矸石所在位置以及机械臂所在位置规划机械臂的矸石排除路径;按照所述机械臂的矸石排除路径控制机械臂运行对矸石进行排除。所述系统包括所述方法步骤对应的模块。
技术研发人员:余丹,兰雨晴,曾大龙,李森,王青鹏
受保护的技术使用者:慧之安信息技术股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!