一种分拣装置、机器人及系统的制作方法
本技术涉及物流,尤其涉及一种分拣装置、机器人及系统。
背景技术:
1、在物流运输领域,采用机器人分拣货物时,需要利用机器人将货物投递到对应分类的格口中,机器人在格口处投递货物之后,机器人需要的旋转,以调整机器人的姿态,然后离开对应分类的格口,故需要在机器人上设置避障传感器,以避免机器人行进或旋转过程中与其他物体发生碰撞,例如,靠近格口时,或者在格口处旋转时,通过设置的避障传感器,检测机器人与格口之间的距离,从而使机器人停止位置与格口之间保持一定的距离,并执行货物投递及机器人旋转的动作。
2、但是,这种投递模式下,机器人在投递尺寸较小的货物时,因为机器人停止位置与格口之间存在一定的距离,导致机器人的载货平台和格口之间存在一定的间隙,使得小尺寸的货物极易落入该间隙中,从而造成投递失败,严重时,导致货物损坏,或者卡住机器人的行走路线,引发设备故障。
技术实现思路
1、本实用新型提供一种分拣装置、机器人及系统,以避免因为机器人停止位置与格口之间存在一定的距离,导致机器人的载货平台和格口之间存在一定的间隙,在投递小尺寸货物时,小尺寸的货物极易落入该间隙中,从而造成投递失败的问题。
2、本实用新型第一方面提供一种分拣装置,其特征在于,包括至少一个分拣格口,所述分拣格口包括滑道以及设置在所述滑道两侧的挡板;
3、在所述滑道的入口处还设置有过渡板,在向所述滑道投递货物时,所述过渡板在所述滑道的延伸方向上伸出所述挡板。
4、在一种实现方式中,在向所述滑道投递货物时,所述过渡板呈水平状态,或者,所述过渡板与所述滑道平行。
5、在一种实现方式中,在所述分拣机器人投递货物时,所述过渡板的高度低于分拣机器人的载货平台的高度。
6、在一种实现方式中,所述分拣装置还包括用于支撑所述分拣格口的支撑架,所述支撑架在竖直投影上,处于所述滑道的入口和所述滑道的出口之间。
7、在一种实现方式中,所述挡板上还设置有避让口,以避让所述分拣机器人的载货平台。
8、在一种实现方式中,所述过渡板固定设置在所述滑道的入口处,且所述过渡板与所述滑道一体成型。
9、在一种实现方式中,所述过渡板活动设置在所述滑道的入口处;在非投递货物状态时,所述过渡板在竖直投影上位于所述滑道的入口与出口之间,在投递货物状态时,所述过渡板活动至沿所述滑道的延伸方向延伸,且至少部分伸出所述滑道。
10、本实用新型第人方面提供一种分拣机器人,所述分拣机器人应用在权利要求-中任一项所述的一种分拣装置中。
11、在一种实现方式中,所述分拣机器人的载货平台设置有过渡板调整装置,在所述分拣机器人向所述分拣装置投递货物时,所述过渡板调整装置将所述分拣装置的过渡板调整至滑道和所述分拣机器人的载货平台之间。
12、本实用新型第三方面提供一种分拣系统,其特征在于,包括分拣机器人和分拣装置,所述分拣装置包括至少一个分拣格口,所述分拣格口包括滑道以及设置在所述滑道两侧的挡板;
13、所述分拣系统还包括过渡板,所述过渡板设置在所述滑道的入口处,或者,所述过渡板设置在所述分拣机器人的载货平台,在所述分拣机器人向所述滑道投递货物时,所述过渡板处于所述滑道和所述分拣机器人的载货平台之间。
14、本实用新型提供的技术方案,通过在所述滑道的入口处还设置有过渡板,在向所述滑道投递货物时,所述过渡板在所述滑道的延伸方向上伸出所述挡板,应用本技术方案,在向分拣格口投递货物时,以避免机器人的载货平台和格口之间的间隙过大,从而在投递小尺寸货物时,避免小尺寸的货物落入该间隙中。
15、上述说明仅是本实用新型实施例技术方案的概述,为了能够更清楚了解本实用新型实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
技术特征:
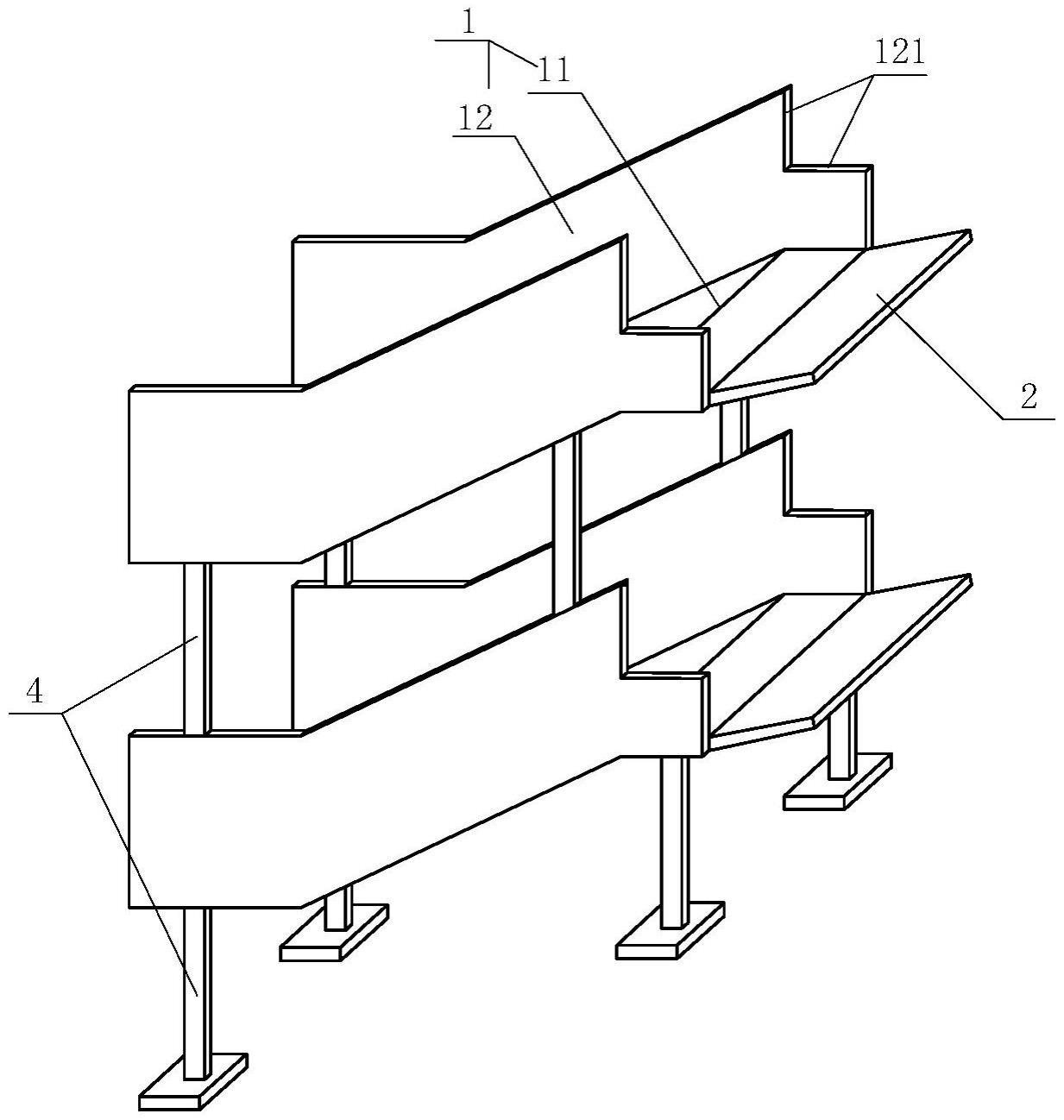
1.一种分拣装置,其特征在于,包括至少一个分拣格口(1),所述分拣格口(1)包括滑道(11)以及设置在所述滑道(11)两侧的挡板(12);
2.根据权利要求1所述的一种分拣装置,其特征在于,在向所述滑道(11)投递货物时,所述过渡板(2)呈水平状态,或者,所述过渡板(2)与所述滑道(11)平行。
3.根据权利要求1所述的一种分拣装置,其特征在于,在分拣机器人投递货物时,所述过渡板(2)的高度低于分拣机器人的载货平台的高度。
4.根据权利要求1所述的一种分拣装置,其特征在于,所述分拣装置还包括用于支撑所述分拣格口(1)的支撑架(4),所述支撑架(4)在竖直投影上,处于所述滑道(11)的入口和所述滑道(11)的出口之间。
5.根据权利要求1所述的一种分拣装置,其特征在于,所述挡板(12)上还设置有避让口(121),以避让分拣机器人的载货平台。
6.根据权利要求1-5中任一项所述的一种分拣装置,其特征在于,所述过渡板(2)固定设置在所述滑道(11)的入口处,且所述过渡板(2)与所述滑道(11)一体成型。
7.根据权利要求1-5中任一项所述的一种分拣装置,其特征在于,所述过渡板(2)活动设置在所述滑道(11)的入口处;在非投递货物状态时,所述过渡板(2)在竖直投影上位于所述滑道的入口与出口之间,在投递货物状态时,所述过渡板(2)活动至沿所述滑道(11)的延伸方向延伸,且至少部分伸出所述滑道(11)。
8.一种分拣机器人,其特征在于,所述分拣机器人应用在权利要求1-7中任一项所述的一种分拣装置中。
9.根据权利要求8所述的一种分拣机器人,其特征在于,所述分拣机器人的载货平台上设置有过渡板调整装置,在所述分拣机器人向所述分拣装置投递货物时,所述过渡板调整装置将所述分拣装置的过渡板(2)调整至滑道(11)和所述分拣机器人的载货平台之间。
10.一种分拣系统,其特征在于,包括分拣机器人和分拣装置,所述分拣装置包括至少一个分拣格口(1),所述分拣格口(1)包括滑道(11)以及设置在所述滑道(11)两侧的挡板(12);
技术总结
本技术涉及仓储物流技术领域,提供一种分拣装置、机器人及系统,所述分拣装置包括至少一个分拣格口,所述分拣格口包括滑道以及设置在所述滑道两侧的挡板;在所述滑道的入口处还设置有过渡板,在向所述滑道投递货物时,所述过渡板在所述滑道的延伸方向上伸出所述挡板。应用本技术方案,在向分拣格口投递货物时,以避免机器人的载货平台和格口之间的间隙过大,从而在投递小尺寸货物时,避免小尺寸的货物落入该间隙中。
技术研发人员:叶婵君
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:20230418
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!