基于尾流预测的风电机组最大功率点追踪控制方法及系统
本公开属于风电控制,具体涉及一种基于尾流预测的风电机组最大功率点追踪控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、风电已成为新能源发电的主流,但是风力发电厂的最大功率点追踪(maximumpower point tracking,简称mppt)控制响应速度慢,直接影响风电的输出功率。
3、当风机从流过的气流中提取能量时,产生逆风流动的缓慢流动的湍流空气尾流;若另一台风电机组在这个尾流的路径上,尾流风速的降低会降低下游涡轮机的发电功率,进而减少风场的总发电功率。当前风电场mppt依赖中央控制站完成,其需要接收场内机组传回的风机实时信息,并下发有功控制指令。随着风场的规模化发展,大规模场站的中央控制站通信负担愈发沉重,其通信带宽需求高,建设成本加大。风场层mppt运算时间随场内风机数量增加而增长,面对大规模集群将难以保证mppt响应时间达标;同时,中央控制站故障将导致整个风场失去调控,甚至造成大面积风机脱网,系统可靠性较低。
4、据发明人了解,现有的风电mppt控制主要采用梯度上升法和拟牛顿法,通过和相邻机组共享功率信息,计算控制收敛梯度,使整个风场逐渐收敛至最大功率点;在控制过程中,收敛调节的控制过程比较长,风能的利用效率较低。
技术实现思路
1、为了解决上述问题,本公开提出了一种基于尾流预测的风电机组最大功率点追踪控制方法及系统,在尾流传导过程中,预先通过尾流模型计算出下风风机受尾流影响引起的功率变化,并以预测尾流引起的变化计算新的收敛梯度,实现在尾流传导过程中的预先调整,有效减少了调节过程中的功率损耗,提高了风能的利用效率。
2、根据一些实施例,本公开的第一方案提供了一种基于尾流预测的风电机组最大功率点追踪控制方法,采用如下技术方案:
3、一种基于尾流预测的风电机组最大功率点追踪控制方法,包括:
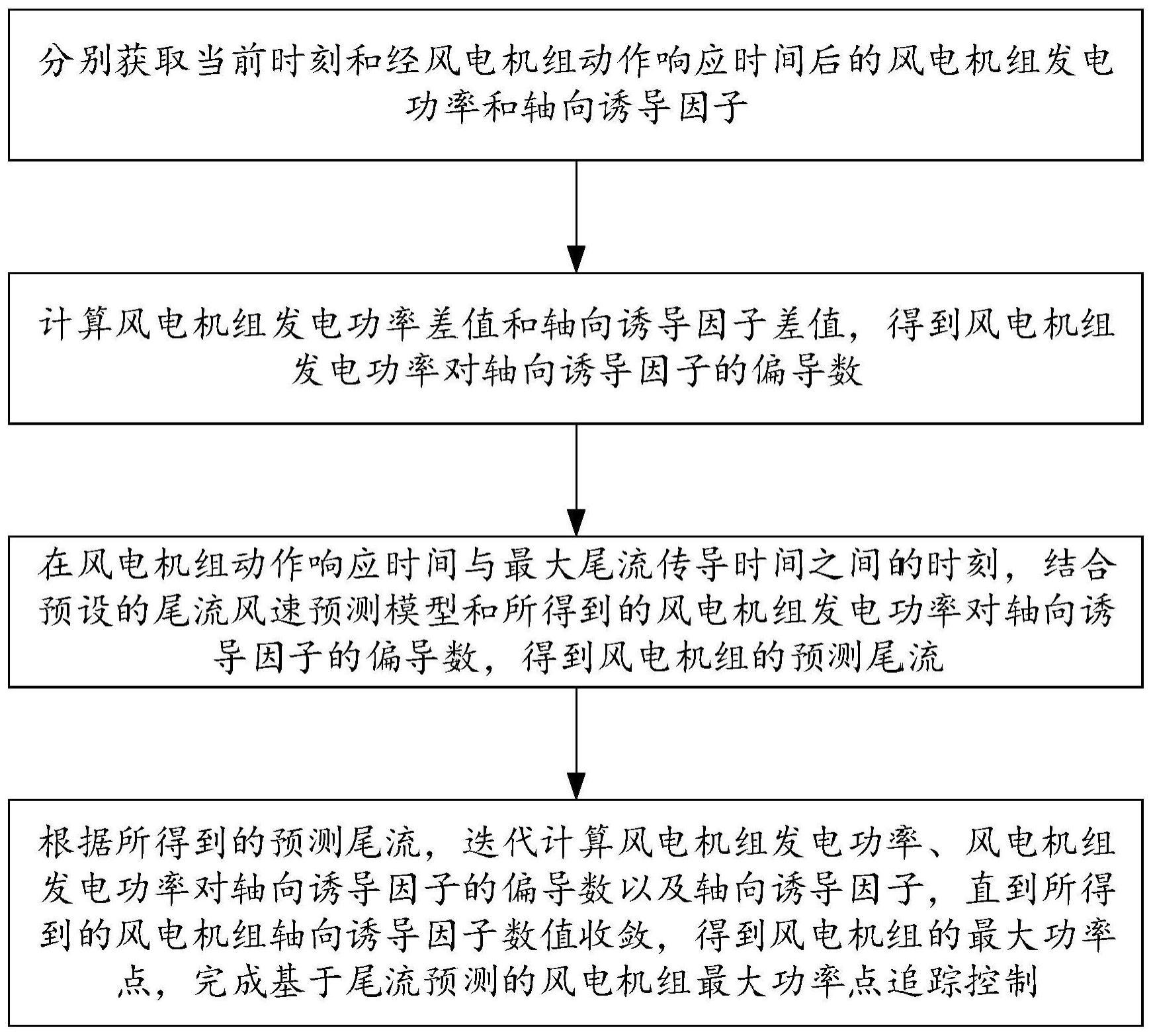
4、分别获取当前时刻和经风电机组动作响应时间后的风电机组发电功率和轴向诱导因子;
5、计算风电机组发电功率差值和轴向诱导因子差值,得到风电机组发电功率对轴向诱导因子的偏导数;
6、在风电机组动作响应时间与最大尾流传导时间之间的时刻,结合预设的尾流风速预测模型和所得到的风电机组发电功率对轴向诱导因子的偏导数,得到风电机组的预测尾流;
7、根据所得到的预测尾流,迭代计算风电机组发电功率、风电机组发电功率对轴向诱导因子的偏导数以及轴向诱导因子,直到所得到的风电机组轴向诱导因子数值收敛,得到风电机组的最大功率点,完成基于尾流预测的风电机组最大功率点追踪控制。
8、作为进一步的技术限定,采用定步长最大功率点追踪控制法进行轴向诱导因子的迭代更新,即得其中,ai(k)表示当前时刻第i个风机的轴向诱导因子,k表示当前时刻,k表示步长,j表示第j个风机,且i∈(0,n)、j∈(i,n),n表示风电机组中风机的个数。
9、进一步的,所述轴向诱导因子的迭代更新过程中只与下风风机相关,即得其中,当前时刻风电机组发电功率对轴向诱导因子的偏导数为
10、
11、作为进一步的技术限定,所述预设的尾流风速预测模型采用尾流风速变化模型,所述尾流风速变化是对风电机组的下风向风速的减少和恢复过程中风速的预测,即得风速变化系数si(d):其中,d是第i个风机的下风处距机组的距离,ct,i(t0)是第i个风机在t0时刻的推力系数,r是第i个风机的扫风半径。
12、进一步的,所述第i个风机在下风距离d处的风速vx(d)为:vx(d)=si(d)v∞;其中,v∞表示无风机时在距离d处的实际风速。
13、作为进一步的技术限定,在计算所述风电机组的最大功率点的过程中,在风电机组动作响应时间与最大尾流传导时间之间的时刻,通过尾流风速预测模型,得到预测的轴向诱导因子,结合各个风机的发电有功功率的变化,得到下风风机对上风风机的轴向诱导因子的偏导数,计算风电机组的轴向诱导因子;重复迭代计算,直到所得到的风电机组的轴向诱导因子的数值收敛。
14、进一步的,在风电机组的轴向诱导因子的数值收敛的时刻,基于风电机组的轴向诱导因子得到风电机组的发电功率,完成对风电机组最大功率点追踪控制。
15、根据一些实施例,本公开的第二方案提供了一种基于尾流预测的风电机组最大功率点追踪控制系统,采用如下技术方案:
16、一种基于尾流预测的风电机组最大功率点追踪控制系统,包括:
17、获取模块,其被配置为分别获取当前时刻和经风电机组动作响应时间后的风电机组发电功率和轴向诱导因子;
18、计算模块,其被配置为计算风电机组发电功率差值和轴向诱导因子差值,得到风电机组发电功率对轴向诱导因子的偏导数;
19、预测模块,其被配置为在风电机组动作响应时间与最大尾流传导时间之间的时刻,结合预设的尾流风速预测模型和所得到的风电机组发电功率对轴向诱导因子的偏导数,得到风电机组的预测尾流;
20、控制模块,其被配置为根据所得到的预测尾流,迭代计算风电机组发电功率、风电机组发电功率对轴向诱导因子的偏导数以及轴向诱导因子,直到所得到的风电机组轴向诱导因子数值收敛,得到风电机组的最大功率点,完成基于尾流预测的风电机组最大功率点追踪控制。
21、根据一些实施例,本公开的第三方案提供了一种计算机可读存储介质,采用如下技术方案:
22、一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本公开第一方面所述的基于尾流预测的风电机组最大功率点追踪控制方法中的步骤。
23、根据一些实施例,本公开的第四方案提供了一种电子设备,采用如下技术方案:
24、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本公开第一方面所述的基于尾流预测的风电机组最大功率点追踪控制方法中的步骤。
25、与现有技术相比,本公开的有益效果为:
26、本公开利用尾流预测模型,在尾流传导过程中预先进行了分布式控制的优化。有效利用了尾流传导过程的时间,加速了风场分布式mppt的动态响应时间;在梯度上升法的控制框架下进行,保留有该方法的mppt追踪精度,保障了算法的有效性;本公开所介绍的控制方法没有更改控制框架,在尾流传导完成后,通过实时尾流影响,进行进一步的梯度校正,有利于维持原有mppt控制精度。
技术特征:
1.一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,包括:
2.如权利要求1中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,采用定步长最大功率点追踪控制法进行轴向诱导因子的迭代更新,即得其中,ai(k)表示当前时刻第i个风机的轴向诱导因子,k表示当前时刻,k表示步长,j表示第j个风机,且i∈(0,n)、j∈(i,n),n表示风电机组中风机的个数。
3.如权利要求2中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,所述轴向诱导因子的迭代更新过程中只与下风风机相关,即得其中,当前时刻风电机组发电功率对轴向诱导因子的偏导数为
4.如权利要求1中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,所述预设的尾流风速预测模型采用尾流风速变化模型,所述尾流风速变化是对风电机组的下风向风速的减少和恢复过程中风速的预测,即得风速变化系数si(d):其中,d是第i个风机的下风处距机组的距离,ct,i(t0)是第i个风机在t0时刻的推力系数,r是第i个风机的扫风半径。
5.如权利要求4中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,所述第i个风机在下风距离d处的风速vx(d)为:vx(d)=si(d)v∞;其中,v∞表示无风机时在距离d处的实际风速。
6.如权利要求1中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,在计算所述风电机组的最大功率点的过程中,在风电机组动作响应时间与最大尾流传导时间之间的时刻,通过尾流风速预测模型,得到预测的轴向诱导因子,结合各个风机的发电有功功率的变化,得到下风风机对上风风机的轴向诱导因子的偏导数,计算风电机组的轴向诱导因子;重复迭代计算,直到所得到的风电机组的轴向诱导因子的数值收敛。
7.如权利要求6中所述的一种基于尾流预测的风电机组最大功率点追踪控制方法,其特征在于,在风电机组的轴向诱导因子的数值收敛的时刻,基于风电机组的轴向诱导因子得到风电机组的发电功率,完成对风电机组最大功率点追踪控制。
8.一种基于尾流预测的风电机组最大功率点追踪控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的基于尾流预测的风电机组最大功率点追踪控制方法中的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一项所述的基于尾流预测的风电机组最大功率点追踪控制方法中的步骤。
技术总结
本公开属于风电控制技术领域,具体涉及一种基于尾流预测的风电机组最大功率点追踪控制方法及系统,包括:分别获取当前时刻和经风电机组动作响应时间后的风电机组发电功率和轴向诱导因子;计算风电机组发电功率差值和轴向诱导因子差值,得到风电机组发电功率对轴向诱导因子的偏导数;在风电机组动作响应时间与最大尾流传导时间之间,结合尾流风速预测模型和风电机组发电功率对轴向诱导因子的偏导数,得到风电机组的预测尾流;根据预测尾流,迭代计算风电机组发电功率、风电机组发电功率对轴向诱导因子的偏导数以及轴向诱导因子,直到风电机组轴向诱导因子数值收敛,得到风电机组的最大功率点,完成基于尾流预测的风电机组最大功率点追踪控制。
技术研发人员:李真,李少林,贺敬,何汉,李俊达
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!