基于变速传动与变负载耦合的水轮机控制方法及相关装置
本发明属于水轮机控制,特别涉及基于变速传动与变负载耦合的水轮机控制方法及相关装置。
背景技术:
1、海流能的开发利用,虽然到现在研究仅有四十多年,但海流能却是清洁能源中发展速度最快的一员。深海探测装备对于深海稳定发电站的需求十分迫切。一个稳定可靠的深海能源站不但会极大地减少维护船只的费用,而且会增加探测器的探测面积,缩短探测时间。由于深海中轮机与电机输出最佳功率的转速差距较大,因此改同轴传动为双轴传动,引入变速齿轮。同时,传统深海发电系统的最大功率追踪方法适于小范围内寻优,可以用于弥补增速比控制的精度缺陷。目前,深海发电系统采用固定增速比,由于水下流动环境复杂、数学模型不够精确,固定的增速比无法达到需要的控制效果;以及海水的阻力、轮机和转子的惯性造成系统控制严重滞后,响应时间长,影响控制的实时性。随着人工智能技术的发展,近年来提出的深度强化学习控制方法因具有不断完善自身控制策略提高自身模型的适应性和超前控制的特性,可以很好的应用于本场景中。然而,深度强化学习控制方法也具有一定的弊端:深度强化学习控制方法自身功耗大,且深度强化学习算法所需要的训练周期较长,前期控制效果不稳定。
技术实现思路
1、本发明的目的在于提供基于变速传动与变负载耦合的水轮机控制方法及相关装置,以解决现有度强化学习控制方法自身功耗大,且深度强化学习算法所需要的训练周期较长,前期控制效果不稳定的问题。
2、为实现上述目的,本发明采用以下技术方案:
3、第一方面,本发明提供基于变速传动与变负载耦合的水轮机控制方法,包括:
4、采集水轮机环境变量信息;
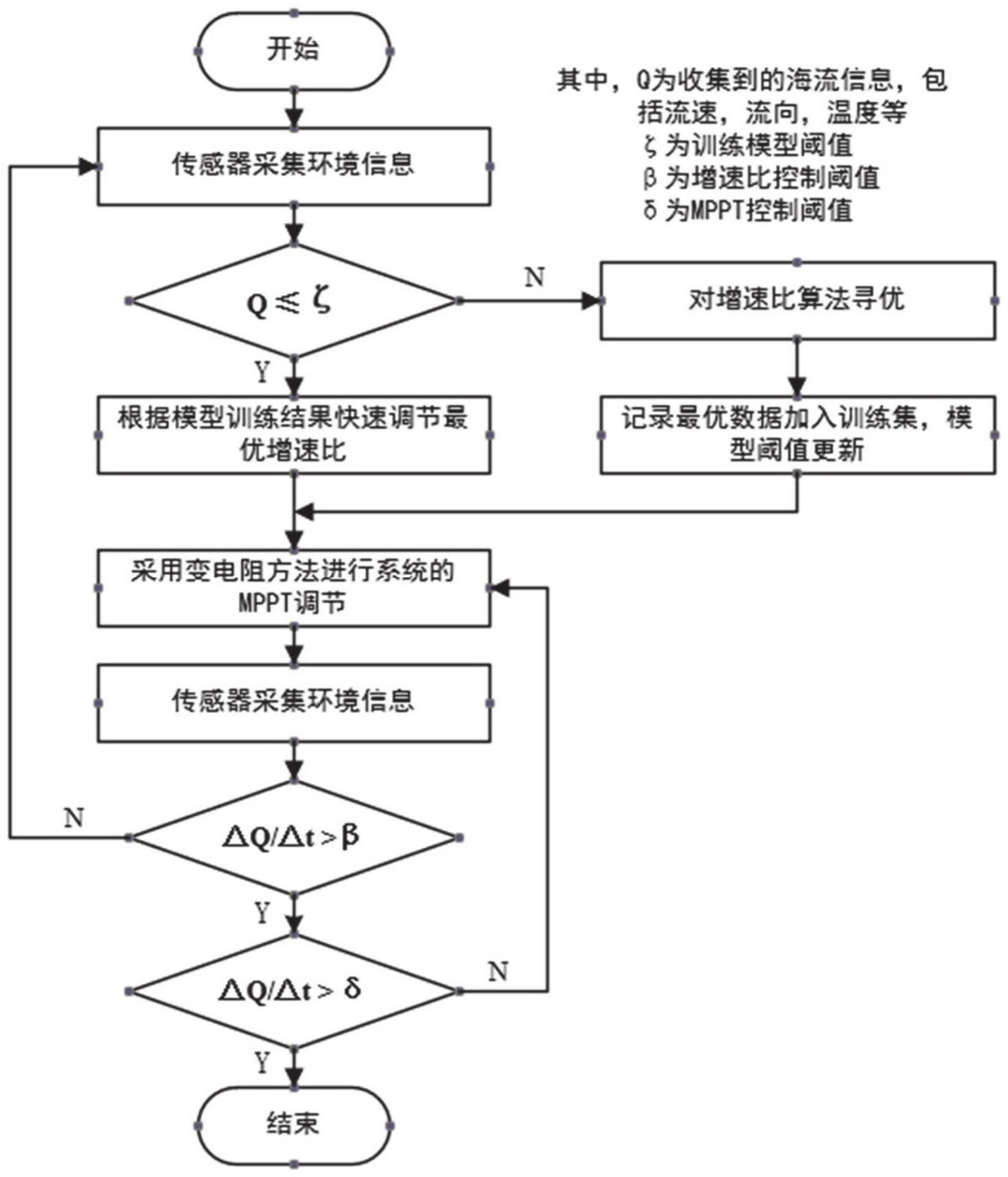
5、将采集的水轮机环境变量信息与预设的训练模型边界阈值进行比较,得到当前训练模型的训练程度和范围,根据训练程度和范围调节得到当前环境下的最优增速比;
6、通过电路结构变负载的方法来调节水轮机发电机系统的阻力矩,与当前环境下的最优增速比结合后得到当前环境下水轮机的最佳平衡转速;
7、最佳平衡转速下水轮机环境变量与上一时刻水轮机环境变量进行差异大小对比,根据对比结果对最优增速比进行动态调节。
8、可选的,水轮机环境变量信息包括:
9、流场流速、海流偏航角、水轮机转速、水轮机扭矩、发电机转速和发电机扭矩。
10、可选的,根据训练程度和范围调节得到当前环境下的最优增速比:
11、若水轮机环境变量未超出训练模型边界阈值,直接依据模型训练的结果调节得到当前环境下的最优增速比;
12、若环境变量超出训练模型边界阈值,采用寻优算法确定针对当前环境下的最优增速比。
13、可选的,在通过寻优算法得到最优增速比后,将当前环境变量信息以及其对应的最优增速比数据加入训练模型的训练集,在训练模型基于更新后的数据集训练后,对模型的边界阈值进行更新。
14、可选的,最佳平衡转速下水轮机环境变量:
15、在针对当前时刻进行水轮机最佳转速调节后,重新采集水轮机环境变量数据,得到最佳平衡转速下水轮机环境变量。
16、可选的,根据对比结果对最优增速比进行动态调节:
17、若满足δq/δt>β,则当前时刻环境变量与上一时刻有大差异,最优增速比需要针对当前时刻的新环境重新进行调节;δq为归一化环境变量模值变化量,δt为控制系统采样间隔;
18、在不满足大变化不等式δq/δt>β的条件下,若满足小变化不等式δq/δt>δ,则当前时刻环境变量与上一时刻相比有小变化,不调节最优增速比,单独通过变负载的mppt调节方法对小变化的最佳转速调节;若不满足δq/δt>δ,则当前时刻环境与上一时刻相比没有大变化,不对最佳增速比和负载进行调节,水轮机的最佳转速对比上一时刻没有变化。
19、可选的,单独通过变负载的mppt调节:
20、给定初始升降压倍率γ
21、采集电能输出端的电压电流参数,计算电能输出功率p
22、调整升降压倍率为
23、采集电能输出端的电压电流参数,计算电能输出功率p
24、若输出功率满足判断条件:η为既定达到最大输出功率的判断阈值,即输出功率在最大输出功率的判断阈值内,则结束控制;
25、若输出功率不满足判断条件:且p2>p1,则继续调整升降压倍率为重复上述过程直至输出功率满足此判断条件;
26、若输出功率不满足判断条件:且p1>p2,则将β值设置为自身相反数后,调整升降压倍率为重复上述过程直至输出功率满足此判断条件。
27、第二方面,本发明提供基于变速传动与变负载耦合的水轮机控制系统,包括:
28、数据采集模块,用于采集水轮机环境变量信息;
29、最优增速比获取模块,用于将采集的水轮机环境变量信息与预设的训练模型边界阈值进行比较,得到当前训练模型的训练程度和范围,根据训练程度和范围调节得到当前环境下的最优增速比;
30、最佳平衡转速获取模块,用于通过电路结构变负载的方法来调节水轮机发电机系统的阻力矩,与当前环境下的最优增速比结合后得到当前环境下水轮机的最佳平衡转速;
31、最优增速比动态调节模块,用于最佳平衡转速下水轮机环境变量与上一时刻水轮机环境变量进行差异大小对比,根据对比结果对最优增速比进行动态调节。
32、第三方面,本发明提一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现基于变速传动与变负载耦合的水轮机控制方法的步骤。
33、第四方面,本发明提一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现基于变速传动与变负载耦合的水轮机控制方法的步骤。
34、与现有技术相比,本发明有以下技术效果:
35、本发明提出了加入增速比变速传动和变负载mppt结合的控制策略。通过对环境变量的采集和分析,来选择不同的最优增速比调节方法。在针对环境确定最优增速比后,通过变负载mppt的方式对最优转速进行细节控制。最终在增速比和mppt的结合下使水轮机拥有当前环境下的最佳转速。同时在控制的过程中不同的样本也对模型的训练进行强化和深入补充,进一步拓展了模型的鲁棒性和适用性。两个控制程序的判断逻辑使得其能针对环境的变化量做出最佳控制逻辑选择,减小了系统在控制程序上的能量消耗,使得系统整体的产能效率最大化。
36、本发明利用神经网络训练的模型实现对不同海流环境下最佳增速比的选择,实现了变速传动阶段发电效率的最大化。在此基础上针对性的进行以mppt算法为控制策略的变负载微调节,使得整个系统的能源利用效率最大化。实现了增速比变速传动和变负载mppt变负载控制策略的有机组合,使得该系统同时具备良好的工作环境适应性及高效发电特性。
技术特征:
1.基于变速传动与变负载耦合的水轮机控制方法,其特征在于,包括:
2.根据权利要求1所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,水轮机环境变量信息包括:
3.根据权利要求1所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,根据训练程度和范围调节得到当前环境下的最优增速比:
4.根据权利要求3所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,在通过寻优算法得到最优增速比后,将当前环境变量信息以及其对应的最优增速比数据加入训练模型的训练集,在训练模型基于更新后的数据集训练后,对模型的边界阈值进行更新。
5.根据权利要求1所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,最佳平衡转速下水轮机环境变量:
6.根据权利要求1所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,根据对比结果对最优增速比进行动态调节:
7.根据权利要求6所述的基于变速传动与变负载耦合的水轮机控制方法,其特征在于,变负载的mppt调节具体为:
8.基于变速传动与变负载耦合的水轮机控制系统,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述基于变速传动与变负载耦合的水轮机控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述基于变速传动与变负载耦合的水轮机控制方法的步骤。
技术总结
基于变速传动与变负载耦合的水轮机控制方法及相关装置,包括:采集水轮机环境变量信息;根据训练程度和范围调节得到当前环境下的最优增速比;通过电路结构变负载的方法来调节水轮机发电机系统的阻力矩,与当前环境下的最优增速比结合后得到当前环境下水轮机的最佳平衡转速;对最优增速比进行动态调节。本发明提出了加入增速比变速传动和变负载MPPT结合的控制策略。通过对环境变量的采集和分析,来选择不同的最优增速比调节方法。在针对环境确定最优增速比后,通过变负载MPPT的方式对最优转速进行细节控制。最终在增速比和MPPT的结合下使水轮机拥有当前环境下的最佳转速。
技术研发人员:陈雅楠,史锦康,钱禹岐,郭朋华,聂佳玮,周家逸
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!