一种考虑塔影效应的风机最大功率点跟踪控制方法与流程
本发明属于风电机组控制,特别是一种考虑塔影效应的风机最大功率点跟踪控制方法。
背景技术:
1、为提高变速恒频风电机组发电量,需要致力于对风电机组年发电量有主要贡献的最大功率点跟踪(maximum power point tracking,mppt)运行阶段提效研究。该阶段的主要实现方式有功率信号反馈法(也称最优转矩法)、叶尖速比法和爬山法。其中,最优转矩法以其高稳定性、高实用性等优点被广泛应用于大型风电机组中。
2、但随着风电机组逐步面向大型化发展,传统的最优转矩法已经无法调和大转动惯量风轮跟踪能力不足与湍流风况下高难度跟踪目标间日益凸显的矛盾。该激化的矛盾将导致实际风电机组多数时间处于追求稳态点的动态过程,甚至出现跟踪失损、失效情况。为此不少学者对传统最优转矩法进行了改进。
3、随着风力机的大型化,塔架不断增高,风轮直径不断增长,风切变和塔影效应的影响将不断增大。风力机的3个叶片都承受一个周期性变化的气动载荷,对叶片的结构强度和疲劳强度都会产生影响,风力机的输出功率也会产生波动,从而影响输出的电能质量。进一步研究发现,风机在mppt阶段的跟踪效果受到塔影效应的影响,其会导致电磁转矩发生周期性波动,从而降低风机风能捕获效果。但现有研究尚未关注到该现象。
技术实现思路
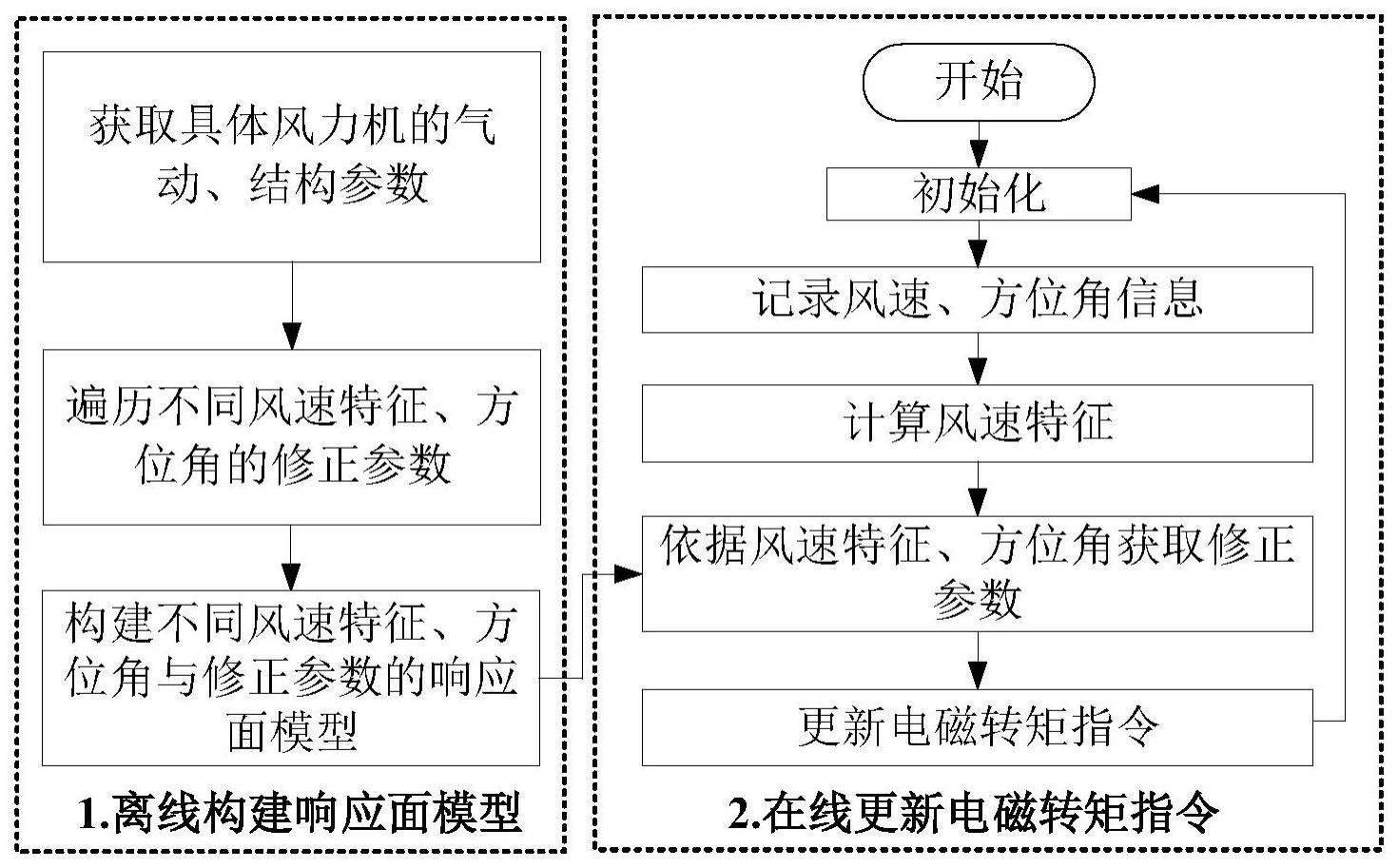
1、本发明的目的在于针对上述现有技术存在的问题,提供一种考虑塔影效应的风机最大功率点跟踪控制方法,依据湍流风况在线调用离线构建的风速特征、方位角与修正参数的响应面模型,以指导修正参数设计,进而对电磁转矩进行修正,实现在最大功率点跟踪过程中降低塔影效应引发的传动链载荷增长问题。该方法对湍流风况适应性好,逻辑简单,工程应用空间广。
2、实现本发明目的的技术解决方案为:一方面,提供了一种考虑塔影效应的风机最大功率点跟踪控制方法,所述方法包括以下步骤:
3、步骤1,离线遍历不同风速特征、方位角与修正参数a的映射关系,构建响应面模型;
4、步骤2,初始化修正参数a,并设置优化周期ts;
5、步骤3,获取风速信息、方位角信息;
6、步骤4,基于步骤1建立的响应面模型,依据当前风速特征、方位角在线优化修正参数a;
7、步骤5,依据步骤4得到的修正参数a,更新电磁转矩te;
8、步骤6,判断当前优化周期ts是否结束,若结束,则将步骤5计算得到的电磁转矩指令te下达至最大功率点跟踪控制器,同时返回执行步骤2。
9、进一步地,步骤1所述离线遍历风速特征、方位角与修正参数a的映射关系,并构建响应面模型,具体包括:
10、步骤1-1,获取风机结构参数与环境参数,所述结构参数包括转动惯量jt、叶片半径r、额定功率pn、额定转速ωn;所述环境参数包括空气密度ρ;
11、步骤1-2,建立应用传统ot方法的风机最大功率点跟踪控制模型,遍历不同风况特征、方位角下的修正参数a;
12、步骤1-3,依据步骤1-2将不同风况特征、方位角与修正参数a构建响应面模型,利用最小二乘法可得其函数关系为:
13、
14、式中,为平均风速,ti为湍流强度等级,ωeff为等效湍流频率,θ为旋转方位角。
15、进一步地,步骤2中初始化修正参数a为0.5,优化周期ts取10min。
16、进一步地,步骤3中具体采用激光雷达测风仪获取风机轮毂处的风速信息、方位角信息。
17、进一步地,步骤5中更新电磁转矩te的公式为:
18、
19、式中,te为更新后的电磁转矩,a为修正参数,kdopt为转矩增益系数,ωg为风轮转速。
20、另一方面,提供了一种考虑塔影效应的风机最大功率点跟踪控制系统,所述系统包括:
21、第一模块,用于离线遍历不同风速特征、方位角与修正参数a的映射关系,构建响应面模型;
22、第二模块,用于初始化修正参数a,并设置优化周期ts;
23、第三模块,用于获取风速信息、方位角信息;
24、第四模块,用于基于第一模块建立的响应面模型,依据当前风速特征、方位角在线优化修正参数a;
25、第五模块,用于依据第四模块得到的修正参数a,更新电磁转矩te;
26、第六模块,用于判断当前优化周期ts是否结束,若结束,则将第五模块计算得到的电磁转矩指令te下达至最大功率点跟踪控制器,同时返回执行第二模块。
27、本发明与现有技术相比,其显著优点为:
28、1)本发明实现了考虑塔影效应的风机最大功率点跟踪控制方法,显著降低了塔影效应引发的风机传动链载荷增长现象。
29、2)本发明设计逻辑简便,便于工程应用,仅需更改控制指令,无需增加硬件装置,面向不同湍流风况均呈现良好的适应性。
30、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种考虑塔影效应的风机最大功率点跟踪控制方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的考虑塔影效应的风机最大功率点跟踪控制方法,其特征在于,步骤1所述离线遍历风速特征、方位角与修正参数a的映射关系,并构建响应面模型,具体包括:
3.根据权利要求2所述的考虑塔影效应的风机最大功率点跟踪控制方法,其特征在于,步骤2中初始化修正参数a为0.5,优化周期ts取10min。
4.根据权利要求1所述的考虑塔影效应的风机最大功率点跟踪控制方法,其特征在于,步骤3中具体采用激光雷达测风仪获取风机轮毂处的风速信息、方位角信息。
5.根据权利要求1所述的考虑塔影效应的风机最大功率点跟踪控制方法,其特征在于,步骤5中更新电磁转矩te的公式为:
6.基于权利要求1至5任意一项所述方法的考虑塔影效应的风机最大功率点跟踪控制系统,其特征在于,所述系统包括顺次执行的:
7.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5中任一项所述方法。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述方法。
技术总结
本发明公开了一种考虑塔影效应的风机最大功率点跟踪控制方法。考虑到风轮旋转时,塔影周期性3P效应会影响最大功率点跟踪效果,从而引发电磁转矩出现周期性波动现象,进而影响风能捕获效率,增加传动链载荷。本发明对最优转矩曲线进行修正,通过引入修正参数来减缓塔影影响。其修正参数由离线遍历修正参数与风轮旋转方位角、风况构建的响应曲面获得,进而依据当前风况、方位角在线调用响应面模型以周期性指导改进OT方法电磁转矩修正参数设定,从而降低塔影效应带来的负面影响。本发明减缓了塔影效应对风机最大功率点跟踪的影响,且相比传统OT方法能够显著降低传动链载荷波动,提升风能捕获效率。
技术研发人员:张心阳,赵子琰,潘瀚德,徐一舟,张琼予,戴舒婷,葛琳芸,贾晓雯,陈紫冰,王梓洁,黄云蔚,田右加,梁芯萌
受保护的技术使用者:江苏蔚风能源科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!