一种双余度变距桨扇发动机余度切换方法与流程
本发明涉及机械自动化,具体涉及一种双余度变距桨扇发动机余度切换方法。
背景技术:
1、桨扇发动机(propfan)是一种结合了涡桨发动机(turboprop)与涡扇发动机(turbofan)特点的一种新型高亚音速发动机。被视为世界上最具前景的飞机推进系统之一。
2、桨扇发动机为了在同样飞行状态下获得更大的推进力,桨距角通常可以调节。采用电静液作动系统的桨叶变距技术是近年来桨叶伺服作动的优选方案。电静液作动器具有功率大、易冗余等优点。与液压作动器(hydraulic actuator,ha)相比可以避免阀芯堵塞等故障,与机电作动器(electro-mechanical actuator,ema)相比可以有效避免机械传动结构卡死故障。电静液作动器同时具备液压驱动和电驱动等特点,设计过程中采用eha作动器提高整体变距作动系统可靠性和安全性。同时为了提高系统可靠性,采用冗余技术,采用相似余度双电静液作动器主动/备份驱动桨扇发动机桨距角变化。这种双余度电静液作动器的桨叶变距技术具有更高可靠性和安全性,是未来实现桨扇发动机桨叶变桨距角控制的优选技术方案。
3、双余度电静液作动器变距工作中正常工作情况为一个作动器主动工作,另一个作动器备份工作,通过阀使备份作动器作动筒随动,备份作动器电机并不工作。当检测到主动电静液作动器故障发生时,如电机卡阻或传感器故障,通过阀控使主动电静液作动器作动筒随动,断开主动eha电机信号,切换为备份eha工作,通过备份eha电机带动作动筒工作,完成变桨距角等相关任务。
4、现有技术对于桨扇发动机变距控制模型构建研究较少,已有研究多焦距于桨扇推力发动机模型构建,对于变距控制过程以及双余度作动变距过程中出现的故障以及容错切换研究欠缺。目前尚无明确方法研究双余度变距桨扇发动机变距过程中桨距角进行故障诊断与切换。在桨扇发动机变距作动器的故障诊断与切换过程中面临如下问题:如何及进行主动电静液作动器和备份电静液作动器之间的切换。
技术实现思路
1、本发明的目的是提供一种双余度变距桨扇发动机余度切换方法,以解决现有技术中的不足,它能够解决双余度变距系统故障检测判断与作动系统切换问题。发明首先对主动电静液作动器工况进行观测,设计了一种基于卡尔曼滤波的方式对主动电静液作动器工况进行预测估计。并设计自适应阈值对作动系统的故障与否进行判断。同时通过对于电静液作动器中换向阀控制实现主动与备份电静液作动器之间的切换。完成了双余度变距桨扇发动机的余度切换。实现对于故障情况的即时检测分析,同时实现了主动备份作动器之间的快速切换,识别与切换过程总时间小于0.2秒。
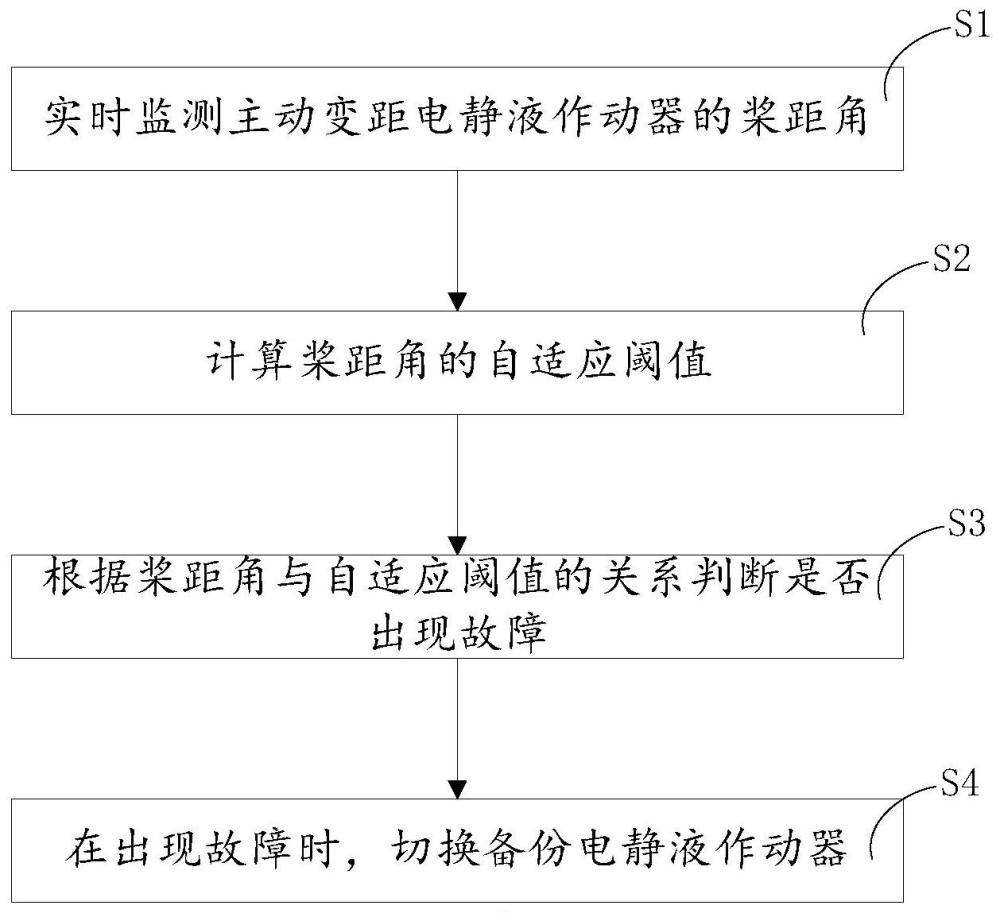
2、本发明提供了一种双余度变距桨扇发动机余度切换方法,其中,包括以下步骤,
3、s1,实时监测主动变距电静液作动器的桨距角;
4、s2,计算桨距角的自适应阈值;
5、s3,根据桨距角与自适应阈值的关系判断是否出现故障;
6、s4,在出现故障时,切换备份电静液作动器。
7、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,步骤s2包括以下步骤,
8、s21,根据预先构建的桨距角状态空间模型,将理想状态下桨距角输出与实际测量的桨距角结合,预测下一时刻输出的实际桨距角;
9、s22,根据桨距角预测值和测量值,计算自适应阈值。
10、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,步骤s21中,通过卡尔曼滤波将理想状态下桨距角输出与桨距角的测量值相互结合,对实际系统下一时刻输出的实际桨距角进行预测。
11、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,步骤s3包括,将主动变距电静液作动器的桨距角的实际输出与桨距角的测量值作差后取绝对值,判断该绝对值对是否大于自适应阈值,如果是,则出现故障,如果否,则未出现故障。
12、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,s22中,自适应阈值的计算公式为,
13、w(k)=ψtη(uk)±2.2φtσ2(uk)|u;
14、其中,ψt为外部影响下的均值的修正值,φt为外部影响下的方差的修正值,η(uk)为输入u在k时刻的残差的均值。
15、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,φt=1,由多次采样得到,j为采样次数。
16、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,桨距角状态空间模型为,
17、
18、
19、其中,参数更新过程为:
20、
21、
22、
23、其中,aβ,bβ,cβ为状态矩阵,uk为k时刻系统的输入向量,yk为系统k时刻输出值,即为桨距角k时刻测量值,为k时刻桨距角预测值,表示由k-1时刻桨距角计算值;pk为k时刻估计得到的最优值的协方差,pk-1为k-1时刻估计得到的最优值的协方差,为由k-1时刻计算得到k时刻最优值协方差;q为预估误差协方差,r为测量噪声的协方差,kk是指k时刻最优估计协方差矩阵迹最小时候的卡尔曼增益。
24、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,状态矩阵通过构建整体理想状态下传递函数后采用matlab系统辨识工具箱得到。
25、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,步骤s4还包括在未出现故障时,控制备份电静液作动器随主电静液作动器空转。
26、如上所述的双余度变距桨扇发动机余度切换方法,其中,可选的是,自适应阈值的期望与方差为,
27、
28、
29、其中,η(uk)为输入u在k时刻的残差的均值,σ2(uk)为输入u在k时刻的残差的方差,n为重复运行并测量残差的次数;r(k)表示k时刻桨距角预测值与测量值的差值。
30、与现有技术相比,本发明能够及时对桨扇发动机变距控制作动系统故障情况进行判断,并能够迅速进行切换,完成故障主动电静液作动器到备份电静液作动器的切换过程。发明对桨扇发动机变距作动器进行故障检测,并通过自适应故障阈值的设计,保证置信度为97%。同时,通过仿真实验证明,发明能够在0.2s实现对于主备电静液作动系统的故障诊断与切换,切换过程中桨距角波动不超过5%,具有较小的故障切换造成的干扰。
技术特征:
1.一种双余度变距桨扇发动机余度切换方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的双余度变距桨扇发动机余度切换方法,其特征在于:步骤s2包括以下步骤,
3.根据权利要求2所述的双余度变距桨扇发动机余度切换方法,其特征在于:步骤s21中,通过卡尔曼滤波将理想状态下桨距角输出与桨距角的测量值相互结合,对实际系统下一时刻输出的实际桨距角进行预测。
4.根据权利要求3所述的双余度变距桨扇发动机余度切换方法,其特征在于:步骤s3包括,将主动变距电静液作动器的桨距角的实际输出与桨距角的测量值作差后取绝对值,判断该绝对值对是否大于自适应阈值,如果是,则出现故障,如果否,则未出现故障。
5.根据权利要求2所述的双余度变距桨扇发动机余度切换方法,其特征在于:s22中,自适应阈值的计算公式为,
6.根据权利要求5所述的双余度变距桨扇发动机余度切换方法,其特征在于:φt=1,由多次采样得到,j为采样次数。
7.根据权利要求2所述的双余度变距桨扇发动机余度切换方法,其特征在于:桨距角状态空间模型为,
8.根据权利要求7所述的双余度变距桨扇发动机余度切换方法,其特征在于:状态矩阵通过构建整体理想状态下传递函数后采用matlab系统辨识工具箱得到。
9.根据权利要求1所述的双余度变距桨扇发动机余度切换方法,其特征在于:步骤s4还包括在未出现故障时,控制备份电静液作动器随主电静液作动器空转。
10.根据权利要求1-9任一项所述的双余度变距桨扇发动机余度切换方法,其特征在于:自适应阈值的期望与方差为,
技术总结
本发明公开了一种双余度变距桨扇发动机余度切换方法,其中,包括以下步骤,S1,实时监测主动变距电静液作动器的桨距角;S2,计算桨距角的自适应阈值;S3,根据桨距角与自适应阈值的关系判断是否出现故障;S4,在出现故障时,切换备份电静液作动器。本发明能够解决双余度变距系统故障检测判断与作动系统切换问题。
技术研发人员:王兴坚,王启扬,樊思明,王少萍,石存
受保护的技术使用者:天目山实验室
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!