一种风力发电机偏航系统的驱动机构
本发明涉及了一种驱动机构,涉及风力发电机领域,具体涉及一种风力发电机偏航系统的驱动机构。
背景技术:
1、风力是一种可再生能源,具有无污染、低排放,分布广泛的优势。风力发电机工作时为了获得最大的风能,通过偏航系统根据风速矢量变化快速平稳地使叶片对准风向,达到最高工作效率。
2、风力发电机偏航系统中驱动系统由电动机、减速器和控制器组成。电动机通过减速器输出到驱动小齿轮,使与之啮合的大齿轮转动,实现风力发电机的偏航。传动的驱动系统电动机、减速器与驱动小齿轮采用一对一传递动力的方式,成本较高;电动机和减速器易出现问题,可靠性较差;同时缺少自锁方案,安全系数较低。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种风力发电机偏航系统的驱动机构。本发明可以降低偏航系统驱动结构的成本,提高其可靠性和安全性。
2、本发明采用的技术方案是:
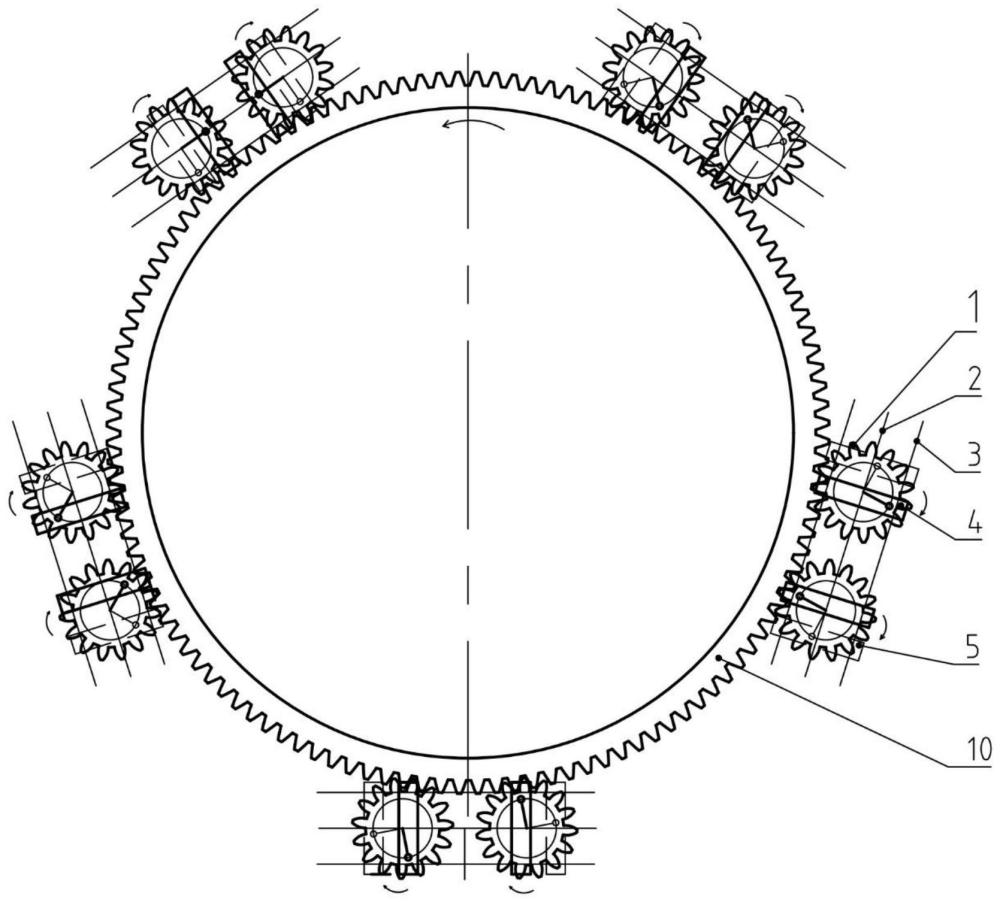
3、本发明的风力发电机偏航系统的驱动机构包括水平安装在风力发电机偏航旋转处的偏航大齿轮,沿偏航大齿轮的圆周边缘均匀间隔分布并与偏航大齿轮相互啮合的若干组驱动输入组件以及安装在每个驱动输入组件的上下两侧并用于驱动的上下传动组件。
4、所述的每组驱动输入组件包括驱动小齿轮组件和曲轴组件,驱动小齿轮组件包括第一驱动小齿轮和第二驱动小齿轮,曲轴组件包括第一曲轴和第二曲轴,第一驱动小齿轮和第二驱动小齿轮相互间隔布置并均与偏航大齿轮相互啮合,第一驱动小齿轮和第二驱动小齿轮分别套装在第一曲轴和第二曲轴中间;第一曲轴和第二曲轴关于偏航大齿轮的中心轴线对称,第一曲轴和第二曲轴的上端连接上传动组件,第一曲轴和第二曲轴的下端连接下传动组件,第一曲轴和第二曲轴旋转时上下端分别保持关于中间截面对称。所有驱动小齿轮直接与偏航大齿轮啮合自转,同时作为行星齿轮绕偏航大齿轮公转。
5、所述的上下传动组件分别位于两个外壳内,两个外壳安装在风力发电机上并位于各自的一个驱动输入组件的上下两侧;上下传动组件包括螺旋传动组件、滑块直线导轨、滑块机构、六个丝杠支承座和四个摆线液压马达,螺旋传动组件包括双螺母梯形丝杠和丝杠螺母,滑块直线导轨包括两个滑块直线导轨,滑块机构包括滑块,螺旋传动组件和滑块直线导轨水平布置并垂直于偏航大齿轮的中心轴线,其中一个第一滑块直线导轨和第二滑块直线导轨平行间隔安装在上方的外壳内顶面,另外一个第一滑块直线导轨和第二滑块直线导轨平行间隔安装在下方的外壳内底面,上双螺母梯形丝杠和下双螺母梯形丝杠分别通过各自的三个丝杠支承座水平安装在上下两个外壳内的上侧和下侧,上双螺母梯形丝杠位于上方的第一滑块直线导轨和第二滑块直线导轨中间的正下方,下双螺母梯形丝杠位于下方的第一滑块直线导轨和第二滑块直线导轨中间的正上方,上滑块机构的第一上滑块和第二上滑块的顶面滑动安装在上方的第一滑块直线导轨和第二滑块直线导轨上,下滑块机构的第一下滑块和第二下滑块滑动安装在下方的第一滑块直线导轨和第二滑块直线导轨上;第一上丝杠螺母和第二上丝杠螺母分别套装在上双螺母梯形丝杠的两侧,第一上滑块和第二上滑块分别连接第一上丝杠螺母和第二上丝杠螺母,第一下丝杠螺母和第二下丝杠螺母分别套装在下双螺母梯形丝杠的两侧,第一下滑块和第二下滑块分别连接第一下丝杠螺母和第二下丝杠螺母,第一曲轴的上下两端分别连接第一上滑块的底面和第一下滑块的顶面的滑动槽中,第二曲轴的上下两端分别连接第二上滑块的底面和第二下滑块的顶面的滑动槽中;四个摆线液压马达的机身两两安装在上下外壳内并位于双螺母梯形丝杠的两端,上双螺母梯形丝杠和下双螺母梯形丝杠的两端均分别同步连接一个摆线液压马达的水平的输出轴。对称布置的摆线液压马达的驱动更强,结构更对称,驱动更平稳。
6、丝杠螺母关于双螺母梯形丝杠中间截面对称,固连在丝杠螺母的滑块关于双螺母梯形丝杠中间截面对称,驱动小齿轮下方丝杠螺母关于双螺母梯形丝杠中间截面对称,固连在丝杠螺母的滑块关于双螺母梯形丝杠中间截面对称。
7、所述的双螺母梯形丝杠采用正反牙结构,双螺母梯形丝杠的两侧螺纹旋向相反。
8、所述的第一上滑块和第二上滑块的相位差为180度,第一下滑块和第二下滑块的相位差为180度,第一上滑块和第一下滑块的相位差为90度,第二上滑块和第二下滑块的相位差为90度。
9、所述的各组驱动输入组件之间均存在相位差,使得驱动时各组驱动输入组件不会同时存在“死点”。
10、本发明的风力发电机偏航系统的驱动机构的驱动方法,包括:
11、所述的驱动机构电连接风力发电机偏航系统的风力传感器,当驱动机构接收到风力传感器的数据信号后,控制驱动机构中上方的两个摆线液压马达转动的方向和角度,驱动上双螺母梯形丝杠旋转,使得第一上丝杠螺母和第二上丝杠螺母相向或相离运动,带动第一上滑块和第二上滑块在滑块直线导轨平移,控制下方的两个摆线液压马达转动的方向和角度,驱动下双螺母梯形丝杠旋转,使得第一下丝杠螺母和第二下丝杠螺母相向或相离运动,带动第一下滑块和第二下滑块在滑块直线导轨平移;第一上滑块和第一下滑块的平移带动第一曲轴的回转运动,使得第一驱动小齿轮旋转,第二上滑块和第二下滑块的平移带动第二曲轴的回转运动,使得第二驱动小齿轮旋转,最终带动啮合的偏航大齿轮转动预设角度,实现风力发电机的偏航对风。
12、本发明的有益效果是:
13、1、本发明采用摆线液压马达驱动,成本较低,扭矩较大。
14、2、本发明采用单个摆线液压马达出现故障仍可继续使用,可靠性高。
15、3、采用双螺母梯形丝杠,传递扭矩大,静止时可实现自锁,安全性高。
16、4、本发明采用多组输入端,每组输入端驱动小齿轮同步旋转,运动平稳性好。
技术特征:
1.一种风力发电机偏航系统的驱动机构,其特征在于:
2.根据权利要求1所述的风力发电机偏航系统的驱动机构,其特征在于:所述的每组驱动输入组件包括驱动小齿轮组件(1)和曲轴组件(6),驱动小齿轮组件(1)包括第一驱动小齿轮(1-1)和第二驱动小齿轮(1-2),曲轴组件(6)包括第一曲轴(6-1)和第二曲轴(6-2),第一驱动小齿轮(1-1)和第二驱动小齿轮(1-2)相互间隔布置并均与偏航大齿轮(10)相互啮合,第一驱动小齿轮(1-1)和第二驱动小齿轮(1-2)分别套装在第一曲轴(6-1)和第二曲轴(6-2)中间;第一曲轴(6-1)和第二曲轴(6-2)关于偏航大齿轮(10)的中心轴线对称,第一曲轴(6-1)和第二曲轴(6-2)的上端连接上传动组件,第一曲轴(6-1)和第二曲轴(6-2)的下端连接下传动组件,第一曲轴(6-1)和第二曲轴(6-2)旋转时上下端分别保持关于中间截面对称。
3.根据权利要求2所述的风力发电机偏航系统的驱动机构,其特征在于:所述的上下传动组件分别位于两个外壳(9)内,两个外壳(9)安装在风力发电机上并位于各自的一个驱动输入组件的上下两侧;上下传动组件包括螺旋传动组件(2)、滑块直线导轨(3)、滑块机构(4、5)、六个丝杠支承座(7)和四个摆线液压马达(8),螺旋传动组件(2)包括双螺母梯形丝杠(2-1a、2-1b)和丝杠螺母(2-2a、2-3a、2-2b、2-3b),滑块直线导轨(3)包括两个滑块直线导轨(3-1、3-2),滑块机构(4、5)包括滑块(4-1、4-2、5-1、5-2),螺旋传动组件(2)和滑块直线导轨(3)水平布置并垂直于偏航大齿轮(10)的中心轴线,其中一个第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)平行间隔安装在上方的外壳(9)内顶面,另外一个第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)平行间隔安装在下方的外壳(9)内底面,上双螺母梯形丝杠(2-1a)和下双螺母梯形丝杠(2-1b)分别通过各自的三个丝杠支承座(7)水平安装在上下两个外壳(9)内的上侧和下侧,上双螺母梯形丝杠(2-1a)位于上方的第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)中间的正下方,下双螺母梯形丝杠(2-1b)位于下方的第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)中间的正上方,上滑块机构(4)的第一上滑块(4-1)和第二上滑块(4-2)的顶面滑动安装在上方的第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)上,下滑块机构(5)的第一下滑块(5-1)和第二下滑块(5-2)滑动安装在下方的第一滑块直线导轨(3-1)和第二滑块直线导轨(3-2)上;第一上丝杠螺母(2-2a)和第二上丝杠螺母(2-3a)分别套装在上双螺母梯形丝杠(2-1a)的两侧,第一上滑块(4-1)和第二上滑块(4-2)分别连接第一上丝杠螺母(2-2a)和第二上丝杠螺母(2-3a),第一下丝杠螺母(2-2b)和第二下丝杠螺母(2-3b)分别套装在下双螺母梯形丝杠(2-1b)的两侧,第一下滑块(5-1)和第二下滑块(5-2)分别连接第一下丝杠螺母(2-2b)和第二下丝杠螺母(2-3b),第一曲轴(6-1)的上下两端分别连接第一上滑块(4-1)的底面和第一下滑块(5-1)的顶面,第二曲轴(6-2)的上下两端分别连接第二上滑块(4-2)的底面和第二下滑块(5-2)的顶面;四个摆线液压马达(8)的机身两两安装在上下外壳(9)内并位于双螺母梯形丝杠(2-1a、2-1b)的两端,上双螺母梯形丝杠(2-1a)和下双螺母梯形丝杠(2-1b)的两端均分别同步连接一个摆线液压马达(8)的水平的输出轴。
4.根据权利要求3所述的风力发电机偏航系统的驱动机构,其特征在于所述的双螺母梯形丝杠(2-1a、2-1b)采用正反牙结构,双螺母梯形丝杠(2-1a、2-1b)的两侧螺纹旋向相反。
5.根据权利要求3所述的风力发电机偏航系统的驱动机构,其特征在于:所述的第一上滑块(4-1)和第二上滑块(4-2)的相位差为180度,第一下滑块(5-1)和第二下滑块(5-2)的相位差为180度,第一上滑块(4-1)和第一下滑块(5-1)的相位差为90度,第二上滑块(4-2)和第二下滑块(5-2)的相位差为90度。
6.根据权利要求1所述的风力发电机偏航系统的驱动机构,其特征在于:所述的各组驱动输入组件之间均存在相位差。
7.根据权利要求1-6任一所述的风力发电机偏航系统的驱动机构的驱动方法,其特征在于,包括:所述的驱动机构电连接风力发电机偏航系统的风力传感器,当驱动机构接收到风力传感器的数据信号后,控制驱动机构中上方的两个摆线液压马达(8)转动的方向和角度,驱动上双螺母梯形丝杠(2-1a)旋转,使得第一上丝杠螺母(2-2a)和第二上丝杠螺母(2-3a)相向或相离运动,带动第一上滑块(4-1)和第二上滑块(4-2)在滑块直线导轨(3)平移,控制下方的两个摆线液压马达(8)转动的方向和角度,驱动下双螺母梯形丝杠(2-1b)旋转,使得第一下丝杠螺母(2-2b)和第二下丝杠螺母(2-3b)相向或相离运动,带动第一下滑块(5-1)和第二下滑块(5-2)在滑块直线导轨(3)平移;第一上滑块(4-1)和第一下滑块(5-1)的平移带动第一曲轴(6-1)的回转运动,使得第一驱动小齿轮(1-1)旋转,第二上滑块(4-2)和第二下滑块(5-2)的平移带动第二曲轴(6-2)的回转运动,使得第二驱动小齿轮(1-2)旋转,最终带动啮合的偏航大齿轮(10)转动预设角度,实现风力发电机的偏航对风。
技术总结
本发明公开了一种风力发电机偏航系统的驱动机构。驱动机构包括水平安装在风力发电机偏航旋转处的偏航大齿轮,沿偏航大齿轮的圆周边缘均匀间隔分布并与偏航大齿轮相互啮合的若干组驱动输入组件以及安装在每个驱动输入组件的上下两侧并用于驱动的上下传动组件。本发明采用摆线液压马达驱动,成本较低,扭矩较大;采用梯形丝杠,静止时可实现自锁,抗风性较强;采用多组均布输入端且每组输入端同步旋转,运动平稳性好。
技术研发人员:王林翔,陆俊彦,陈思媛,胡雪嵘,李俊岑,崔文博
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!