一种漂浮式海上风机一体化安装的重载释放方法
本发明涉及海洋工程,特别是涉及一种漂浮式海上风机一体化安装的重载释放方法。
背景技术:
1、风力发电类型可划分为陆上风力发电及海上风力发电两种形式,与陆上风力发电相比,海上风力发电具有风速更快、风向更稳定、不占用陆地面积、便于沿海地区输电等优点。而我国近海固定式海上风机的开发在近几年趋于饱和。适用于深远海的浮式风机势必成为未来我国风电的建造趋势。对于浮式风机的安装,一般采用在距离工作海域较近的岸上,对于风电进行整体装配,然后通过湿拖的方式,将浮式风机拖航至指定工作海域。拖航过程中,风机浸没水下部分会受到阻力的作用,并且需要考虑风浪流环境的影响以及拖航系统整体稳定性,拖航过程缓慢。
2、随着浮式风电向深远海发展,风机一体化安装具有越来越高的使用潜力。该安装方式将塔筒-机舱-叶片预装配件及风机浮式基础在船坞分别实现建造。风机基础在没有上部风机的前提下,被运送至工作海域完成系泊布置,然后通过浮式风电安装船运载多个上部预装配件,在海上对于预装配件与风机基础执行对接装配作业。随着风电大型化的发展趋势,在风机上部预装配件释放并松开重载固定装置的瞬间,原先作用于浮式安装船的预装配件的重力转移至风机基础之上,这会对处于平衡状态的安装船产生一个巨大的惯性载荷,造成剧烈晃动,影响甲板上其余预装配件机舱内的机械结构,甚至产生破坏和失效,这为风机一体化安装提出了巨大挑战。
技术实现思路
1、本发明的目的在于解决预装配件转移至风机基础时产生的巨大惯性载荷带来不利影响的技术问题,提出一种漂浮式海上风机一体化安装方法及重载释放方法。
2、本发明的技术问题通过以下的技术方案予以解决:
3、一种漂浮式海上风机一体化安装的重载释放方法,包括如下步骤:
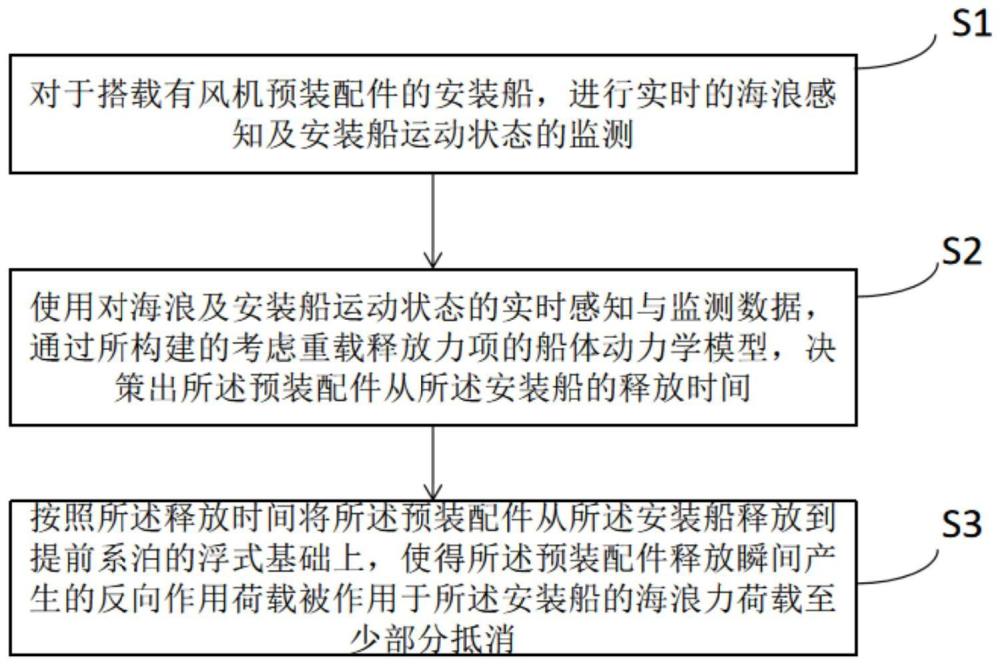
4、s1、对于搭载有风机预装配件的安装船,进行实时的海浪感知及安装船运动状态的监测;
5、s2、使用对海浪及安装船运动状态的实时感知与监测数据,通过所构建的考虑重载释放力项的船体动力学模型,决策出所述预装配件从所述安装船的释放时间;
6、s3、按照所述释放时间将所述预装配件从所述安装船释放到提前完成系泊的浮式基础上,使得所述预装配件释放瞬间产生的反向作用荷载被作用于所述安装船的海浪力荷载至少部分抵消。
7、在一些实施例中,通过海浪雷达进行海面海浪实时感知,或采用船舶运动反演海浪等方法对于安装船所处的海浪环境进行实时反演,通过安装在所述安装船上的位姿传感器(如:惯性传感器和卫星定位系统等),实时监测安装船运动,其中,实时感知与监测数据包括实时液面高度、所述安装船六自由度的实时运动状态。
8、在一些实施例中,步骤s2具体包括:
9、根据实时感知得到海浪谱和海浪要素信息,通过海浪荷载反演算法,对于安装船未来一段时间内受到的海浪荷载进行预测;将海浪感知及船舶运动监测得到的数据作为当前时刻的状态量;根据重载释放的位置(如:船首或船侧)将所述考虑重载释放力项的船体动力学模型简化自由度(2自由度或3自由度)用于简化控制模型设计,基于所述简化控制模型,结合感知的外部荷载,计算预测步数内的船舶未来运动状态量,其中,将所述未来一段时间分解为n段采样时间间隔,n为预测步长,在每个采样时间点,建立采样罚函数,所述罚函数的表达由多项优化目标构成,并设置约束条件,将控制问题转变为在每步采样时间时,求解最小化罚函数的最优化问题;由此计算出最优重载释放时间。
10、在一些实施例中,所述未来一段时间内为0.5-50秒。
11、在一些实施例中,使用多重打靶法计算预测步数内的船舶运动状态量,基于多重打靶法将所述未来一段时间分解为n段采样时间间隔。
12、在一些实施例中,所述多项优化目标可以包括风机机舱处加速度、风机重载固定装置处接触力大小,但不限于上述目标。
13、在一些实施例中,所述简化控制模型作为控制状态空间方程,并将重载释放荷载作为关于重载释放时间相关的外力项作用于其中的动力学方程。
14、在一些实施例中,基于模型预测控制,将所述状态空间方程离散化后,于每一步采样时间设置罚函数,通过使采样时间点处未来n步预测时间内的罚函数最小化,以此来得到局部最优化释放时间;设置释放条件,若在某一采样时间点处计算得到未来n步预测时间内,安装船上各关注点响应满足释放要求,则接受该时间点计算得到的局部最优化释放时间作为最优重载释放时间。
15、在一些实施例中,所述各关注点响应满足释放要求包括但不限于甲板上各个风机机舱处的加速度幅值峰值小于预设极限、风机重载固定装置处接触力大小小于极限值。
16、在一些实施例中,释放条件主要由预装配件风机机舱内部的机械结构能承受的最大加速度决定。
17、本发明与现有技术对比的有益效果包括:
18、本发明提出一种漂浮式海上风机一体化安装的重载释放方法,监测实时的海浪感知及安装船运动状态,构建考虑重载释放力项的船体动力学模型,决策出风机预装配件从安装船释放的时间,并按照释放时间将预装配件从安装船释放到海面的浮式基础上,使得预装配件释放瞬间产生的反向作用荷载与作用于安装船的海浪力荷载至少在一定程度上抵消,提高重载释放时的安全性,保证对接过程中的安全性;进一步地,本发明的优选方案可实现对于预装配件最优化施放时间的决策。
19、实施时,可通过安装船搭载风机预装配件并运行至海面的浮式基础旁,根据如上述的重载释放方法确定的释放最优释放时间,将预装配件从安装船释放到海面的浮式基础上,实现预装配件与浮式基础的对接安装,不仅可节省运输时间,实现大规模安装,而且使得重载释放瞬间产生的反作用力可同作用于船舶的海浪力发生抵消,提高了漂浮式风电一体化安装过程的安全性。
20、本发明实施例中的其他有益效果将在下文中进一步述及。
技术特征:
1.一种漂浮式海上风机一体化安装的重载释放方法,其特征在于,包括如下步骤:
2.如权利要求1的漂浮式海上风机一体化安装的重载释放方法,其特征在于,通过海浪雷达进行海面海浪实时感知或采用船舶运动反演海浪对于安装船所处的海浪环境进行实时反演,通过安装在所述安装船上的位姿传感器,实时监测安装船运动,其中,实时感知与监测数据包括实时液面高度、所述安装船六自由度的实时运动状态。
3.如权利要求1或2的漂浮式海上风机一体化安装的重载释放方法,其特征在于,步骤s2具体包括:
4.如权利要求3的漂浮式海上风机一体化安装的重载释放方法,其特征在于,所述未来一段时间内为0.5-50秒。
5.如权利要求3的漂浮式海上风机一体化安装的重载释放方法,其特征在于,使用多重打靶法计算预测步数内的船舶运动状态量,基于多重打靶法将所述未来一段时间分解为n段采样时间间隔。
6.如权利要求3的漂浮式海上风机一体化安装的重载释放方法,其特征在于,所述多项优化目标包括风机机舱处加速度、风机重载固定装置处接触力大小。
7.如权利要求3的漂浮式海上风机一体化安装的重载释放方法,其特征在于,所述简化控制模型作为控制状态空间方程,并将重载释放荷载作为关于重载释放时间相关的外力项作用于其中的动力学方程。
8.如权利要求3的漂浮式海上风机一体化安装的重载释放方法,其特征在于,基于模型预测控制,将所述状态空间方程离散化后,于每一步采样时间设置罚函数,通过使采样时间点处未来n步预测时间内的罚函数最小化,以此来得到局部最优化释放时间;设置释放条件,若在某一采样时间点处计算得到未来n步预测时间内,安装船上各关注点响应满足释放要求,则接受该时间点计算得到的局部最优化释放时间作为最优重载释放时间。
9.如权利要求8的漂浮式海上风机一体化安装的重载释放方法,其特征在于,所述各关注点响应满足释放要求包括甲板上各个风机机舱处的加速度幅值峰值小于预设极限、风机重载固定装置处接触力大小小于极限值。
10.如权利要求8或9的漂浮式海上风机一体化安装的重载释放方法,其特征在于,释放条件主要由预装配件风机机舱内部的机械结构能承受的最大加速度决定。
技术总结
本发明公开了一种漂浮式海上风机一体化安装的重载释放方法,包括对于搭载有风机预装配件的安装船,进行实时的海浪感知及安装船运动状态的监测;使用对海浪及安装船运动状态的实时感知与监测数据,通过所构建的考虑重载释放力项的船体动力学模型,决策出预装配件从安装船的最优释放时间;按照释放时间执行释放作业,将预装配件从安装船释放到提前系泊的浮式基础上,使得预装配件释放瞬间产生的反向作用荷载被作用于安装船的海浪荷载至少部分抵消,保证对接过程的安全性。
技术研发人员:任政儒,马灿,郑向远,郑苗子
受保护的技术使用者:清华大学深圳国际研究生院
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!