一种十字交叉布置的新型二冲程动力模块
本发明涉及内燃机,尤其涉及一种十字交叉布置的新型二冲程动力模块,及其在内燃机中的应用。
背景技术:
1、常见的二冲程动力装置布置型式呈直列、v型或者水平对置;同时,传统内燃机用运动转换机构是曲柄连杆机构,其自身存在着难以克服的不足,活塞运动时对气缸壁产生侧压力,当内燃机活塞运动到上止点和下止点附近时,此时活塞运动方向发生变化,在侧压力的作用下,活塞从气缸的一侧摆动到气缸的另一侧,活塞拍打气缸壁,产生了所谓的“敲缸”现象,会产生比较大的振动和噪声,降低内燃机使用寿命。同时,发动机工作过程中往复件存在一阶惯性力和二阶惯性力,是造成发动机不平衡和振动的主要原因。
技术实现思路
1、有鉴于此,为解决内燃机中传统的曲柄连杆机构驱动活塞运动时对气缸壁产生侧压力的技术问题,一方面,本发明提供了一种十字交叉布置的新型二冲程动力模块,其通过采用止转轭机构代替曲柄连杆机构对活塞缸作功,使传统的曲柄连杆机构驱动的旋转运动转换为往复直线运动,使连杆与活塞的连接端之间不存在相对运动,活塞对气缸壁无侧压力。曲轴总成在定转速输出的工况下,活塞连杆组件作简谐运动,无二阶往复惯性力。
2、为实现上述目的,本发明提供了如下的技术方案:
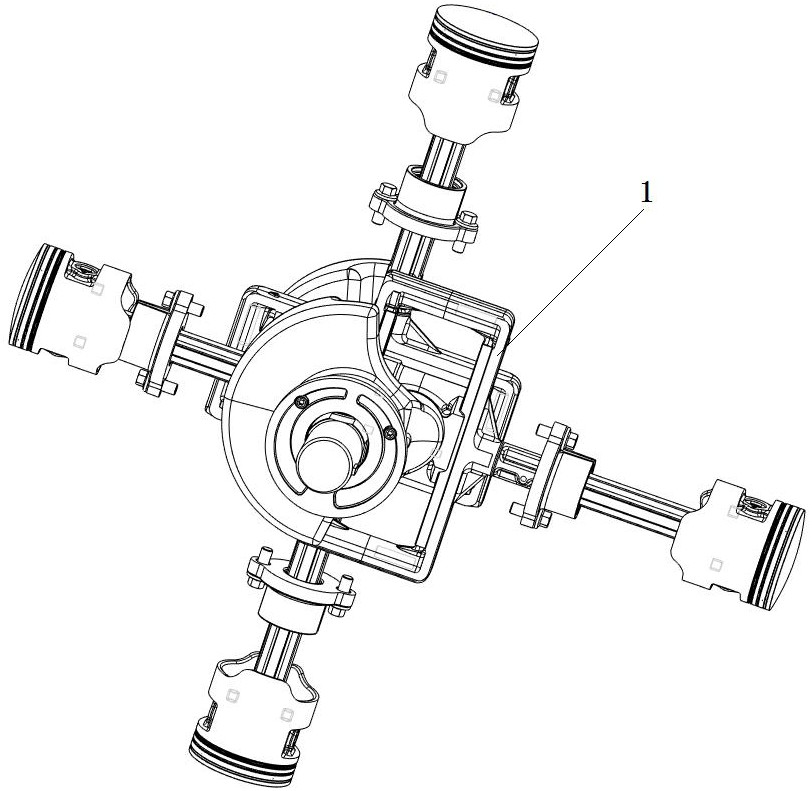
3、一种十字交叉布置的新型二冲程动力模块,包括两个呈十字交叉设置的止转轭机构,代替曲柄连杆机构作功。
4、优选地,所述止转轭机构包括曲轴总成、结构相同且呈十字交叉布置的第一活塞连杆总成和第二活塞连杆总成;
5、所述第一活塞连杆总成包括:
6、连杆部件,其内滑动连接有滑块轴瓦;
7、连杆a,其一端连接于所述连杆部件的右端;
8、连杆b,其一端连接于所述连杆部件的左端;
9、所述连杆a和所述连杆b的另一端均连接有活塞;
10、所述第一活塞连杆总成和所述第二活塞连杆总成中的滑块轴瓦分别与所述曲轴总成中的第一连杆轴径和第二连杆轴径相连接,所述第一活塞连杆总成和第二活塞连杆总成的往复直线运动驱动所述曲轴总成运动。
11、优选地,所述滑块轴瓦由滑块a和滑块b围合而成,所述滑块a和所述滑块b分别与所述连杆部件滑动连接。
12、优选地,所述滑块a和所述滑块b与所述连杆部件滑动连接的部位均设置有耐磨片。
13、优选地,所述连杆a和所述连杆b上均套设有油封部件,用于对所述活塞缸进行密封。
14、另一方面,本发明还提供了上述十字交叉布置的新型二冲程动力模块在内燃机中的应用。
15、本发明相对于现有技术,具有如下的有益效果:
16、1)本发明提供的十字交叉布置的新型二冲程动力模块,通过采用止转轭机构作为运动转换机构,代替曲柄连杆机构对活塞缸作功,使传统的曲柄连杆机构驱动的旋转运动转换为往复直线运动,由于活塞与连杆连接为一体,使连杆与活塞的连接端之间不存在相对运动,活塞对气缸壁无侧压力。
17、2)本发明提供的十字交叉布置的新型二冲程动力模块,在运动过程中,在曲轴总成在定转速输出的情况下,活塞做简谐运动,没有二阶往复惯性力,运动更为平稳。
18、3)本发明提供的十字交叉布置的新型二冲程动力模块,整体质量和体积很小,有益于实现动力输出单元的小型化、轻量化和模块化。
技术特征:
1.一种十字交叉布置的新型二冲程动力模块,其特征在于,包括两个呈十字交叉设置的止转轭机构,代替曲柄连杆机构作功。
2.根据权利要求1所述的一种十字交叉布置的新型二冲程动力模块,其特征在于,所述止转轭机构包括曲轴总成、结构相同且呈十字交叉布置的第一活塞连杆总成和第二活塞连杆总成;
3.根据权利要求2所述的一种十字交叉布置的新型二冲程动力模块,其特征在于,所述滑块轴瓦由滑块a和滑块b围合而成,所述滑块a和所述滑块b分别与所述连杆部件滑动连接。
4.根据权利要求3所述的一种十字交叉布置的新型二冲程动力模块,其特征在于,所述滑块a和所述滑块b与所述连杆部件滑动连接的部位均设置有耐磨片。
5.根据权利要求1-4中任一项所述的一种十字交叉布置的新型二冲程动力模块,其特征在于,所述连杆a和所述连杆b上均套设有油封部件,用于对所述活塞缸进行密封。
6.权利要求1-5中任一项所述的一种十字交叉布置的新型二冲程动力模块在内燃机中的应用。
技术总结
本发明提供了一种十字交叉布置的新型二冲程动力模块,属于内燃机技术领域。本发明包括两个呈十字交叉设置的止转轭机构,代替曲柄连杆机构作功。本发明通过采用止转轭机构代替曲柄连杆机构对活塞缸作功,使传统的曲柄连杆机构驱动的旋转运动转换为往复直线运动,使连杆与活塞的连接端之间不存在相对运动,活塞对气缸壁无侧压力。曲轴总成在定转速输出的工况下,活塞连杆组件作简谐运动,无二阶往复惯性力。
技术研发人员:章振宇,孙瑞婷,张付军,谢礼江
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!