煤矿井下无反复支撑快速掘进钻锚成套装备的制作方法
[0001]
本发明属于综掘巷道掘支锚协同作业设备技术领域,尤其是涉及一种无反复悬臂式掘进机并随支锚运输作业车、超前支护自移式液压支架机构配套使用的煤矿井下无反复支撑快速掘进钻锚成套装备。
背景技术:
[0002]
我国的能源结构显示,煤炭将长期占有我国最主要能源的位置,这决定了我国仍然有必要大力研究煤炭采掘装备。近几十年来,煤炭采掘设备自动化、信息化程度已在稳步提升中,综合采煤机械化不断发展,但煤巷掘进技术仍落后于采煤技术,掘进与支护过程过长,而采煤时间占比相应减少,造成了采掘比例失衡等问题,煤矿难以实现高产高效的工作目标。为了解决煤矿掘进自动化、智能化程度仍相对较低的现状,优化采掘时间比,实现掘支锚联合机组的智能化、少人化、无人化,优化掘、支、锚工序并行作业意义重大。
[0003]
当前机械化快速掘进工艺可分为以下三种:连续采煤机、综掘掘进机、掘锚交叉掘进工艺,其中综掘机适用范围更广,有更广阔的研究价值,掘支锚一体化模式蓬勃发展,掘支锚一体化协同工作机组机械化、自动化、智能化程度较高,可以有效保障煤矿安全,改善采掘比失调、采掘衔接不紧密等问题。
技术实现要素:
[0004]
本发明的主要内容在于提出一种煤矿井下无反复支撑快速掘进钻锚成套装备,该套装备由无反复悬臂式掘进机、自移式超前支护液压支架、支锚运输作业车构成,主要工作分别为掘、支、锚,各部分又相互关联,将掘支锚三个工序综合到一个整体工作循环中,实现综掘巷道下掘进与超前支护、永久锚固技术的并行连续协同作业。
[0005]
本发明的主要目的还包括提供一种基于悬臂式掘进机相配合的多架自移式支锚联合机组系统,与悬臂式掘进机机体相对独立,使得掘进与支锚工序联合,成为高效高产一体化、自动化的并行协同作业机组系统,即:悬臂式掘进机在进行周期断面掘进作业时,由多架自移式支锚联合机组系统实现自移式超前支护临时支架由后到前的运输工作、多工位永久锚杆支护工作。
[0006]
为实现上述目的,解决技术问题所采用的技术方案如下:
[0007]
前述的一种超前支护自移式液压支架机构由顶梁部分、护帮部分、支撑部分组成。其中顶梁部分分为顶梁、伸缩梁、伸缩千斤顶三部分。顶梁和伸缩梁由伸缩千斤顶连接,伸缩千斤顶由铰接方式连接顶梁和伸缩梁,借助伸缩千斤顶,顶梁和伸缩梁可进行横向伸缩运动。顶梁两侧设置限位槽,限制伸缩梁最大伸出位置,保证限定的工作空间。伸缩梁在末端分别有两个通孔,与立柱通过球副连接,作主要支撑,承担大部分载荷;伸缩梁中心端的铰耳与支撑千斤顶连接作辅助支撑。顶梁两端不完全包覆伸缩梁,共同承担支撑作用。
[0008]
其中护帮部分由侧板、支撑千斤顶组成。侧板中心有两个矩形空洞减轻结构重量的同时也起到所期望的护帮作用。侧板底部与底座通过销钉连接固定,同时侧板上设有铰
耳与支撑千斤顶铰接,由支撑千斤顶将顶梁部分与护帮部分连接形成一个三角结构,可以将顶板施加给支架的载荷传递至巷道两帮,实现对两帮的主动支护。
[0009]
其中支撑部分由立柱、底座组成。立柱通过球副铰接在伸缩梁端部,与支撑千斤顶共同承受顶板对顶梁的载荷,是支架的主要承载部件。立柱每侧两个,共计四个立柱承担每个独立单元超前支护液压支架。立柱为单伸缩形式,其使用方便,便于维护,可靠性高。为增大底板比压,防止四根立柱陷入底板,立柱下端通过铰接安装底座支撑整个支架,同时增强了整个液压支架的稳定性。
[0010]
前述的支锚运输作业车主要是由支锚运输作业车机体、托举梁、多工位锚杆钻机三部分组成。
[0011]
其中支锚运输作业车机体配有履带式行走机构来实现移动,来应对综掘巷道复杂的工况环境。同时作业车机体上装有泵站、电控箱和控制中心,实现对液压和电气系统的控制;后部装有爬梯,方便工人上到作业车顶部进行操作和检修的工作。在作业车机体顶部安装托举梁和多工位锚杆钻机,完成支锚和支架运输工作。
[0012]
其中托举梁目的在于完成对超前支护临时支架的运输工作,托举梁主要包括四个部分:托举梁基座、托举梁固定臂、托举梁举升臂和托举梁支架,各个部分依次由液压缸连接实现运动动作,其中托举梁基座安装在支锚运输作业车机体顶部,可左右转动;托举梁固定臂可上下转动;托举梁举升臂可与固定臂相对活塞运动;托举梁支架与托举梁举升臂连接,可转动,最终灵活地实现将超前支护临时液压支架运输到承接轨道上的任务。
[0013]
其中多工位锚杆钻机由钻臂和钻机两部分构成,钻臂共有左右两个,配有平推油缸和举升油缸;钻机包括横向与纵向锚杆钻机,两组共计四个钻机。多工位锚杆钻机可在液压系统的控制下实现平移和旋转动作,以达到多工位锚杆作业的要求。
[0014]
前述的一种无反复悬臂式掘进机是相对于悬臂式掘进机的一种改进,主要是增添了对超前支护液压支架的运输部分,其中所述的运输部分从上到下依次为固定轨道、滑动轨道和承接轨道,各轨道之间可相对滑动,其中固定轨道安装在原有悬臂式掘进机顶部,承接轨道负责承接由支锚运输作业车运输而来的超前支护液压支架,经由各轨道之间的滑动完成对液压支架的运输工作。悬臂式掘进机配有履带式行走装置,截割装置完成掘进工作,溜槽和铲板等部件实现对采掘物料转移至转载机上,完成运输作业。
[0015]
本发明的煤矿井下无反复支撑快速掘进钻锚成套装备与现有系统和技术相比,具有以下优点:
[0016]
(1)本发明针对当今的采掘比失调问题,提出了一种无反复快速掘支锚联合机组系统,将掘进作业与支锚作业实现了空间上的分离,可设计并优化并行协调作业,大大提高了工作效率,降低了支锚作业在掘进周期中的时间占比,降低了工人的劳动强度,提高了巷道支护的智能化、自动化程度;
[0017]
(2)本发明的多工位锚杆钻机移动灵活,可实现多自由度的锚固协同作业,可用于除底板锚固外的一切锚杆支护布置形式,适用性广;
[0018]
(3)本发明的超前支护液压支架设计有较大的无立柱空间,方便设置和维护其他设备。本超前支护液压支架移架快速安全,护顶面积大,空顶面积小,有大面积护帮结构,大大提高了超前支护的安全性;
[0019]
(4)本发明可根据巷道环境,不同高度、宽度以及围岩情况来来调整液压支架的宽
度和高度以达到自适应的目的。同时支锚运输作业车也能适应不同的工作环境,在多种巷道地质环境下完成工作。
[0020]
上述说明仅是本发明内容的概述,为了能够方便按照说明书内容实施,清楚表示和说明本发明的技术手段,以下为本发明的较优实施方式实例并配合附图详细说明如下:
附图说明
[0021]
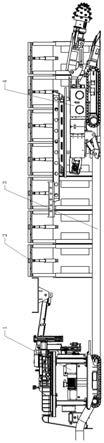
图1是本发明整体结构示意图
[0022]
图2是超前支护自移式支架机构的结构示意图
[0023]
图3是随车配套运输钻锚车的结构示意图
[0024]
图4是无反复悬臂式掘进机示意图
[0025]
图中:
[0026]
1.支锚运输作业车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.超前支护自移式支架机构
[0027]
3.转载机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4.无反复悬臂式掘进机
[0028]
5.伸缩梁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.支撑千斤顶
[0029]
7.伸缩千斤顶
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.顶梁
[0030]
9.立柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10.侧板
[0031]
11.底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12.托举梁支架
[0032]
13.托举梁举升臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14.托举梁固定臂
[0033]
15.纵向锚杆钻机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16.托举梁基座
[0034]
17.横向锚杆钻机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18.控制中心
[0035]
19.泵站
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20.电控箱
[0036]
21.钻臂举升油缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22.钻臂平推油缸
[0037]
23.爬梯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24.截割头
[0038]
25.截割臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26.油箱组
[0039]
27.铲板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
28.固定轨道
[0040]
29.滑动轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30.承接轨道
[0041]
31.溜槽
具体实施方式
[0042]
为更进一步详细说明本发明设计为达成预定发明目的所采取的技术方案,以下结合附图及较佳实施实例,对本发明提出的煤矿井下无反复支撑快速掘进钻锚成套装备的具体实施方式、结构及其流程,详细说明如下。
[0043]
如图1所示的本发明煤矿井下无反复支撑快速掘进钻锚成套装备的整体结构示意图,由支锚运输作业车(1)、超前支护自移式支架结构(2)、转载机(3)、无反复悬臂式掘进机(4)组成。超前支护自移式支架结构(2)有多个独立支架,并排使用并且之间相互独立;超前支护自移式支架结构(2)、支锚运输作业车(1)、无反复悬臂式掘进机(4)各部分之间相互独立,联合使用以完成对超前支护自移式支架结构(2)由后至前的运输工作。
[0044]
如图2所示的本发明煤矿井下无反复支撑快速掘进钻锚成套装备的超前支护自移式支架机构的结构示意图,其主要结构为顶梁(8)、伸缩梁(5)、侧板(10)、支撑千斤顶(6)、
立柱(9)、底座(11)。顶梁部分由顶梁(8)、伸缩梁(5)、伸缩千斤顶(7)三部分组成,其中顶梁(8)与伸缩梁(6)由伸缩千斤顶(7)铰接连接,缸体铰接在顶梁(8)中心板上,液压缸活塞杆与伸缩梁(5)铰接,依靠液压缸带动两者相互运动。超前支护自移式支架机构的收缩流程为直接立柱(9)、支撑千斤顶(6)部分卸压,完成支架的降架操作;再进行收缩千斤顶(7)、支撑千斤顶(6)完全卸压,完成支架的收缩流程。超前支护自移式支架机构的展开流程为收缩千斤顶(7)、支撑千斤顶(6)加压,伸缩梁(5)展开,直到侧板(10)与两帮接触;再对立柱(9)和支撑千斤顶(6)加压,完成支架的升架流程。侧板(10)底部的铰接结构与立柱(9)固定以保持稳定。为增大底板比压,防止四根立柱(9)陷入底板,立柱(9)下端通过铰接安装底座(11)支撑整个支架。
[0045]
如图3所示的本发明煤矿井下无反复支撑快速掘进钻锚成套装备中的支锚运输作业车的结构示意图,由托举梁支架(12)、托举梁举升臂(13)、托举梁固定臂(14)、纵向锚杆钻机(15)、托举梁基座(16)、横向锚杆钻机(17)、控制中心(18)、泵站(19)、电控箱(20)、钻臂举升油缸(21)、钻臂平推油缸(22)、爬梯(23)组成。钻臂由钻臂举升油缸(21)、钻臂平推油缸(22)进行液压控制。托举梁基座(16)安装在支锚运输作业车(1)顶部前段,托举梁基座(16)、托举梁固定臂(14)、托举梁举升臂(13)和托举梁支架(12)依次由液压缸连接到一起,同时托举梁举升臂(13)为托举梁支架(12)提供一个旋转轴,以铰接形式连接,方便转动,完成托举动作。在进行支锚作业时,锚杆钻机(15)(17)与锚杆钻臂连接,可进行多工位的锚杆支护;在进行运输作业时,末端的超前支护自移式支架结构(2)收缩,由托举梁支架(12)、托举梁举升臂(13)、托举梁固定臂(14)组成的托举梁将收缩的超前支护自移式支架结构(2)抬起并运输到承接轨道上,由无反复悬臂式掘进机(4)对收缩的超前支护自移式支架结构(2)进行下一步运输。
[0046]
如图4所示的本发明煤矿井下无反复支撑快速掘进钻锚成套装备中的无反复悬臂式掘进机的结构示意图,由截割头(24)、截割臂(25)、油箱组(26)、铲板(27)、固定轨道(28)、滑动轨道(29)、承接轨道(30)、溜槽(31)组成。截割臂(25)末端安装截割头(24)并带动截割头(24)移动,截割头(24)旋转进行掘进工作,而后铲板(27)将破碎的煤岩通过溜槽(31)运输至转载机(3),最终运出综掘巷道工作面。固定轨道(28)、滑动轨道(30)和承接轨道(30)之间可相对移动,把由支锚运输作业车(1)运输来的收缩状态超前支护自移式支架机构(2)由后运输至掘进机构(4)前方,超前支护自移式支架机构(2)再展开以进行超前支护,最终实现掘支锚工序无反复联合机组。
[0047]
如上所述为本发明的基本技术路线和实施方式,仅是本发明的较佳实施实例而已,并未对本发明作任何形式上的限制以及限定本发明。在本发明中对该技术方案提出了专利保护请求,其保护范围应包括具有上述技术特点的一切变化方式,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施实例所作的任何修饰、简单改造与等效实施或更改,均应属于本案的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1