智能控制清除称重托盘岩屑的装置及方法与流程
1.本发明涉及石油钻井录井领域,特别涉及一种智能控制清除称重托盘岩屑的装置及方法。
背景技术:
2.在不同钻井作业环境下,清除井眼岩屑对于预防泥包、密封、卡钻及井壁坍塌等井下复杂情况十分重要。当钻井队进行大位移井、大斜度井、水平井或丛式井以及深水井等更复杂作业时,井眼不清洁会导致作业风险和作业成本增加,同时井眼稳定性也会变差。钻井队通过提高井眼清洁率和井底循环频率来减少非生产时间,从而提高钻井效率,缩短钻井时间。目前,地面监测岩屑是确定井眼清洁率和井壁是否稳定的常用方法。常规的通过钻井队人员坐岗人工监测岩屑的返出量的方法不智能,不精确,且不能提供实时信息,无法满足司钻和泥浆组长根据实时信息进行高效控制以保持井下作业稳定的要求。近年来,井眼清洁度与井壁稳定性定量化实时监测技术研究在国外取得较大的进步,并初步在钻井现场服务。国内还处于研究开发阶段,已经成为未来的发展趋势。开发并完善这项技术需要解决的问题比较多,其中包括一种智能控制管道钢丝刷清洗称重托盘岩屑的方法。
3.目前,钻井作业过程中,大部分井判断井眼清洁度和井壁稳定性是通过人工坐岗监测岩屑返出量的多少作出定性断定,也有极少部分重点井使用井眼清洁度和井壁稳定性定量化实时监测技术作出定量确定,这种新技术在国外已服务于少部分钻井市场,但服务费很高,技术还需要完善,称重托盘翻到岩屑不干净,特别是高密度、高粘度的井,称重托盘翻到岩屑的效率不足50%,有的在称重托盘翻到岩屑时用水冲洗托盘内的岩屑,但托盘翻倒时间很短,其翻倒岩屑的效率不足85%,抽水的电机易烧毁,岩屑称重装置体积大重量重,安装时需要起重机。
4.目前,井眼清洁度和井壁稳定性定量化实时监测技术还处于实验推广阶段,还服务极少部分重点井,其文献大部分来自于专利的报道,其中国内专利不多,大部分来自国外。从检索国内外的专利及文献来看,目前通过称重托盘从振动筛出口处实时接入岩屑定时或整米称重后翻倒托盘刮扫岩屑,再返正水平位置为下一次接入岩屑,这样累计返出岩屑的重量,返出岩屑体积计算、理论返出岩屑体积计算、实时岩屑返出率计算和设定安全岩屑返出率窗口的比较,以此来定量实时监测井眼清洁度和井壁稳定性。对于称重托盘上岩屑翻倒的效果没有描述。
技术实现要素:
5.本发明的目的是针对现有技术中的不足,提供一种智能控制清除称重托盘岩屑的方法。一方面提高了在线实时定量判断井眼清洁度和井壁稳定性的准确性,另一方面是解决岩屑称重装置中岩屑称重托盘倾倒岩屑干净程度的技术难题和降低岩屑称重托盘翻倒次数,提高使用寿命。
6.其技术方案如下:
智能控制清除称重托盘岩屑的装置,包括称重托盘,称重托盘两端设有旋转轴,旋转轴与气动马达的输出轴连接,气动马达下方设有底座,底座下方设有称重传感器,所述底座一端设有限位传感器,所述旋转轴上设有限位部,所述限位部与所述限位传感器限位配合,还包括电磁阀、抽水泵,所述电磁阀包括电磁阀a、电磁阀b,所述气动马达为正反转气动马达,所述气动马达设有正转管路、反转管路,所述电磁阀a设置于正转管路,所述电磁阀b设置于所述反转管路,所述抽水泵的供水管与所述喷嘴连通,所述称重托盘上设有若干贯通盘体的小孔,所述称重托盘背面设有若干与小孔一一对应的喷嘴,所述喷嘴的出水口与小孔连通。
7.进一步的,所述称重托盘呈半圆柱槽状或v形槽状。
8.进一步的,所述电磁阀还包括电磁阀c,所述抽水泵为气动隔膜泵,所述电磁阀c设置于所述气动隔膜泵的供气管上。
9.进一步的,所述限位部为限位柱,所述限位柱为两个,限制所述旋转轴的旋转角度为180
°
。
10.进一步的,所述喷嘴为单向阀喷嘴。
11.上述方案进一步包括,智能控制清除称重托盘岩屑的方法,所述程序采集控制单元分别与电磁阀、称重传感器、限位传感器通讯连接。
12.包括步骤:(1)通过程序采集控制单元采集限位传感器的位置信号判断称重托盘5处于水平收集岩屑状态;此时,电磁阀a处于开通状态,电磁阀b、电磁阀c处于关闭状态;(2)程序采集控制单元通过称重传感器采集岩屑重量信号,所述程序采集控制单元预设有岩屑重量参数,当岩屑重量或收集时间达到预设的岩屑重量参数时,程序采集控制单元发出指令信号,关闭电磁阀a,打开电磁阀b、电磁阀c,气动马达反转使称重托盘进行翻转,同时,气动隔膜泵启动并向喷嘴供水,进行清洗;当称重托盘翻转到位,程序采集控制单元通过限位传感器采集到位置信号,关闭电磁阀b、电磁阀c,同时打开电磁阀a,气动隔膜泵停止,气动马达正转,带动称重托盘复位,即完成一次清洗。
13.本发明的有益效果是:智能控制称重托盘中岩屑的翻倒,翻倒清除岩屑干净,其翻倒岩屑的效率达到95%以上,还设计了称重托盘在采集岩屑时始终保持水平位置,不受岩屑落入称重托盘不同位置的影响,实时称重岩屑的效果显著。降低了录井小队人员的劳动量和劳动强度;实现由人工坐岗监测岩屑的返出量来定性判断井眼清洁和井壁情况向智能控制在线实时定量监测岩屑的返出量,以及程序上通过理论计算岩屑的返出量,两者的比值与安全返出率的比较,判断井眼清洁度和井壁的稳定性的转变,减少人为因素和其他因素的影响,提高判断井眼清洁度和井壁稳定性的准确性、及时性,进而提高钻井效率,缩短钻井时间,减少非生产时间,大大降低作业风险和作业成本,达到优质高效钻探目的。为公司在录井行业的竞争提供了技术支持,具有显著的经济效益和社会效益。
附图说明
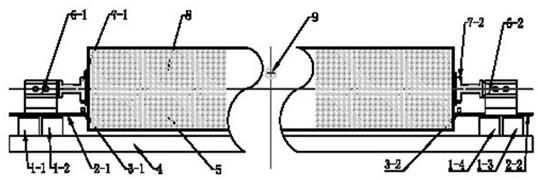
14.图1是本发明结构示意图;
图2是本发明各部件连接示意图;图3是本发明控制回路结构示意图;图4是本发明接线示意图;图中:1称重传感器,2底座,3限位传感器,4安装架,5称重托盘,6气动马达,7旋转轴,8喷嘴,9计数器,10程序采集控制单元,11电磁阀,12气动隔膜泵,13压缩空气。
具体实施方式
15.实施例一:请参阅图1-4,一种智能控制清除称重托盘岩屑的装置是由多数带单向阀喷嘴8、旋转轴7-1和7-2、称重托盘5、计数传感器9、限位传感器3-1和3-2、称重传感器1-1、1-2、1-3和1-4、气动马达6-1和6-2、底座2-1和2-2、安装架4、压缩空气13、电磁阀11-1、11-2和11-3、水池14、气动隔膜泵12和程序采集控制单元10等部件组成,如图1、图2、图3和图4。
16.称重托盘5是半圆柱槽体或v形槽体,其上整齐排列多数小孔,多数带单向阀喷嘴8安装在称重托盘5背面的多数小孔上,并且喷嘴与小孔对齐且密封,多数带单向阀喷嘴8通过水管线与气动隔膜泵12的输出口相连,旋转轴7-1和7-2分别安装在称重托盘5两端的中间位置上,计数传感器9安装在称重托盘5背面中部,实现称重托盘5翻转计数,限位传感器3-1和3-2分别安装在旋转轴7-1和7-2正下方底座2-1和2-2上,气动马达6-1和6-2安装在底座2-1和2-2上,并分别驱动旋转轴7-1和7-2,称重传感器1-1、1-2、1-3和1-4分别安装在安装架4的两端,其称重部分分别于底座2-1和2-2接触,实现岩屑的称重。
17.实施例二:智能控制清除称重托盘岩屑的方法,所述程序采集控制单元分别与电磁阀、称重传感器、限位传感器通讯连接。
18.包括步骤:(1)通过程序采集控制单元采集限位传感器的位置信号判断称重托盘5处于水平收集岩屑状态;此时,电磁阀a处于开通状态,电磁阀b、电磁阀c处于关闭状态;(2)程序采集控制单元通过称重传感器采集岩屑重量信号,所述程序采集控制单元预设有岩屑重量参数,当岩屑重量或收集时间达到预设的岩屑重量参数时,程序采集控制单元发出指令信号,关闭电磁阀a,打开电磁阀b、电磁阀c,气动马达反转使称重托盘进行翻转,同时,气动隔膜泵启动并向喷嘴供水,进行清洗;当称重托盘翻转到位,程序采集控制单元通过限位传感器采集到位置信号,关闭电磁阀b、电磁阀c,同时打开电磁阀a,气动隔膜泵停止,气动马达正转,带动称重托盘复位,即完成一次清洗。
19.工作原理:程序采集控制单元10供电后,通过程序采集控制单元10采集限位传感器3-1和3-2的信号判断称重托盘5处于水平收集岩屑状态,此时,电磁阀11-1处于开通状态,电磁阀11-2处于关闭状态,气动马达6-1和6-2通过电磁阀11-1获得一定的压缩空气13,使得称重托盘5获得逆时针旋转的力,但限位传感器4-1和4-2的挡头阻止称重托盘5逆时针旋转,这样称重托盘5收集岩屑时一直处于水平位置不偏移,称重托盘5的翻倒是由程序采集控制单元10的软件设置,可以按收集岩屑重量也可以按收集岩屑时间执行翻转,此时翻倒岩屑的重量由称重传感器1-1、1-2、1-3和1-4共同采集,此时程序采集控制单元10发出指
令,使电磁阀11-1、11-2和11-3上电,电磁阀11-1处于闭合切断供气,称重托盘5逆时针旋转的力卸掉,电磁阀11-2处于常开并提供压缩空气13。
20.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权力要求及其等同限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1