一种自动调节悬臂式掘进机截割臂移速的控制系统的制作方法
1.本实用新型属于工程机械技术领域,尤其涉及一种自动调节悬臂式掘进机截割臂移速的控制系统。
背景技术:
2.悬臂掘进机是隧道挖掘工程机械中的重要组成部分,它可以实现连续截割、装载和运输等作业。隧道内部的岩石构成不是一成不变的,不同岩石构成的区域的硬度也不一样。当截割臂以恒定速度移动切割硬度大的岩石时,就会造成截割部负载增大,造成截割电机和驱动油缸过载,损坏电气元件和机械结构。
3.掘进机分为驾驶室控制模式和远程遥控器控制模式,当驾驶室控制模式时,因为操作员距离截割臂较近,手动控制截割臂移动操作杆,通过驾驶室安装的触摸屏显示电流,参考截割电机电流并且近距离观察截割臂的移动情况,可以手动调节截割臂的移动速度;当远程遥控控制模式时,操作员距离截割臂区域较远,因为视线和现场环境问题无法准确的判断截割臂的移动状况,此时需要采取措施自动调节截割臂的移动速度。
技术实现要素:
4.为解决上述背景技术问题,本实用新型提供一种自动调节悬臂式掘进机截割臂移速的控制系统。
5.为实现上述发明目的,本实用新型采用如下技术方案:
6.一种自动调节悬臂式掘进机截割臂移速的控制系统,包括:驾驶室内的显示电流和液压等参数值的显示屏、带有调节截割臂移动速度档位的船型双位按钮的双轴操作杆;远程遥控器上的调节截割臂移动速度的双轴操作杆和截割臂移速档位选择旋钮;控制柜内设置的高性能高防护等级的处理电流采集系统采集的信号车载移动控制器,通过阀门接线箱内的移动车辆pwmi输出模块,分别与液压阀组中的运用pwmi技术输出电流信号驱动液压比例电磁阀相连;液压阀组中的上升下降液压缸和左右回转液压缸的四个电液比例调压阀,为控制液压缸使截割臂以特定速度上下左右移动的执行机构;所述电流采集系统为实时采集截割电机的电流数据,并传送给车载移动控制器;
7.所述的双轴操作杆的双轴分为x和y轴,分别控制截割臂的上下左右移动,操作杆的倾斜幅度越大,截割臂移动速度越大;所述的驾驶室操作杆上的船型双位开关,点击双位按钮增减截割臂移动速度档位,移动速度从低到高分为0、1、2、3共4档移动速度;所述的遥控器截割臂移速档位选择旋钮,旋转旋钮选择截割臂移动速度档位,移动速度从低到高分为0、1、2、3共4档移动速度;所述的截割电机的电流采集系统、车载移动控制器都安装在控制柜内,电流采集系统将实际电流转化为4-20ma电流传送给车载移动控制器,车载移动控制器为整个系统的核心,进行程序和算法处理,接收和发送信号;所述的移动车辆pwmi输出模块安装在阀门接线箱内,输出调制解调后的电流信号控制电液比例调压阀;所述的电液比例调压阀安装在液压阀组中,控制液压油流量的大小;所述的液压油缸作为运行执行机
构,控制截割臂上下左右移动;所述的远程遥控器发送器通过无线电和接收器通讯;所述的远程遥控器接收器、车载移动控制器、移动车辆专用pwmi输出模块和驾驶室通过canopen进行通讯。
8.由于采用如上所述技术方案,本实用新型具有如下优越性:
9.一种自动调节悬臂式掘进机截割臂移速的控制系统,是一套自动调节截割臂的移动速度的系统应用于隧道挖掘工程机械悬臂式掘进机,其优越性如下:
10.1、两种截割臂移动速度的调节模式使截割臂移速控制更加人性化和智能化,减少了截割电机因为功率大电流过载造成频繁停机的问题,延长了设备的无故障运行时间,提高了生产效率。
11.2、远程遥控器发送器通过无线电和接收器通讯;所述的远程遥控器接收器、车载移动控制器、移动车辆专用pwmi输出模块和驾驶室通过canopen进行通讯,大大减少设备之间的连线,简化控制。
12.3、由遥控器的旋钮开关、操作杆的倾斜幅度和截割电机电流共同作用自动调节截割臂移动速度,减少了掘进机的能耗比,节约成本。
附图说明
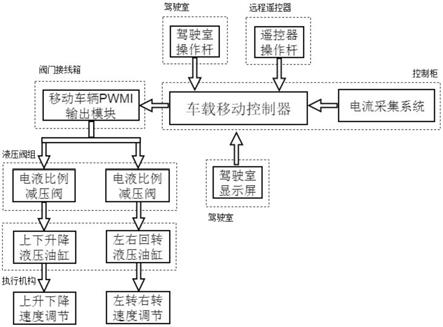
13.图1 悬臂掘进机自动调速系统功能图;
14.图2 电液比例调压阀工作范围曲线图;
15.图3 操作杆倾斜幅度与输出电流曲线图;
16.图4 截割电流判定移动速度档位流程图。
具体实施方式
17.如图1、2、3、4所示,一种自动调节悬臂式掘进机截割臂移速的控制系统,包括:驾驶室内的显示电流和液压等参数值的显示屏、带有调节截割臂移动速度档位的船型双位按钮的双轴操作杆;远程遥控器上的调节截割臂移动速度的双轴操作杆和截割臂移速档位选择旋钮;控制柜内设置的高性能高防护等级的处理电流采集系统采集的信号车载移动控制器,通过阀门接线箱内的移动车辆pwmi输出模块,分别与液压阀组中的运用pwmi技术输出电流信号驱动液压比例电磁阀相连;液压阀组中的上升下降液压缸和左右回转液压缸的四个电液比例调压阀,为控制液压缸使截割臂以特定速度上下左右移动的执行机构;所述电流采集系统为实时采集截割电机的电流数据,并传送给车载移动控制器;所述的双轴操作杆的双轴分为x和y轴,分别控制截割臂的上下左右移动,操作杆的倾斜幅度越大,截割臂移动速度越大;所述的驾驶室操作杆上的船型双位开关,点击双位按钮增减截割臂移动速度档位,移动速度从低到高分为0、1、2、3共4档移动速度;所述的遥控器截割臂移速档位选择旋钮,旋转旋钮选择截割臂移动速度档位,移动速度从低到高分为0、1、2、3共4档移动速度;所述的截割电机的电流采集系统、车载移动控制器都安装在控制柜内,电流采集系统将实际电流转化为4-20ma电流传送给车载移动控制器,车载移动控制器为整个系统的核心,进行程序和算法处理,接收和发送信号;所述的移动车辆pwmi输出模块安装在阀门接线箱内,输出调制解调后的电流信号控制电液比例调压阀;所述的电液比例调压阀安装在液压阀组中,控制液压油流量的大小;所述的液压油缸作为运行执行机构,控制截割臂上下左右移
动;所述的远程遥控器发送器通过无线电和接收器通讯;远程遥控器接收器、车载移动控制器、移动车辆专用pwmi输出模块和驾驶室通过canopen进行通讯。
18.本调节悬臂式掘进机截割臂移速的方案,具体策略是:1、驾驶室控制模式,驾驶员依据现场截割情况移动截割臂,参考驾驶室内部的显示屏所显示截割电机的运行电流,点击驾驶室双轴操作杆上的船型双位按钮,确定截割臂的移动速度档位,控制操作杆的倾斜幅度,确定截割臂的移动速度。当截割电机的电流变小时,可以手动增大操作杆的倾斜幅度或者点击船型按钮增大移动速度档位,提高截割臂的移动速度。当截割电机电流变大时,可以手动减小操作杆的倾斜幅度或者点击船型按钮减小移动速度档位,降低截割臂的移动速度;2、远程遥控模式,通过远程遥控器上的速度选择旋钮设置截割臂移动速度档位,控制操作杆的倾斜幅度,确定截割臂的移动速度。当截割电机电流变大,截割臂移动速度档位在程序中自动降档,截割臂移动速度自动下降。当截割电机电流减小,当前的移动速度档位在程序中自动升档,升到档位选择按钮设置的速度档位为止,截割臂移动速度同时自动上升。
19.本发明中,截割电机电流作用于截割臂移动速度的控制方法为:如图4所示,电流采集系统采集的截割电机电流值,电流值大于0.85倍截割电机额定电流值或者遥控器速度选择旋钮选择0档,此时规定截割臂移动速度为0档;电流值大于0.75倍截割电机额定电流值或者遥控器速度选择旋钮选择1档,此时规定截割臂移动速度为1档;电流值大于0.65倍截割电机额定电流值或者遥控器速度选择旋钮选择2档,此时规定截割臂移动速度为2档;电流值小于0.65倍截割电机额定电流值或者遥控器速度选择旋钮选择1档,此时规定截割臂移动速度为3档。
20.本发明中,移动速度档位和双轴操作杆决定截割臂移动速度的方法为:如图3所示,x轴是双轴操作杆的倾斜幅度范围0-100%,y周为转化为程序中的工程值0-1000,对应的是电液比例调压阀开度范围的输出电流值对应0-1000ma,电液比例调压阀的开度和控制电流比如图2所示成线型比例。操作杆的倾斜幅度0-100%共分为 5段,分别为5%、10%、50%、75%和100%,每一段对应不同斜率的输出电流值直线。截割臂的移动速度分为0、1、2、3逐次增高的四档,每一档的速度曲线都分为5段,第1段0-5%设定移速曲线斜率较大,是为了克服电液比例调压阀在启动时的“滑黏效应”,如图2所示,操作杆倾斜小幅度就能产生较大电流达到液压阀开阀电流。不同的移动速度档位对应着不同的输出电流值曲线。综上所述,通过截割臂移动速度档位和操作杆的倾斜幅度可以确定截割臂的移动速度大小。
21.综上所述,将截割电机电流、移动速度档位和双轴操作杆共同作用来控制截割臂移动速度,实现了掘进机截割臂移动速度的自动化和智能化的控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1