用于改善夹头型机构内接触应力分布的装置和方法与流程
1.本公开总体上涉及用于可释放地夹持物体或工件的夹头型和卡瓦型装置和机构,使得当轴向载荷在夹头和其接收套筒之间沿一个方向传递时,工件相对于夹头的位移被强烈地抵抗,并且当轴向载荷的方向相反时,夹头被推动以释放工件。
背景技术:
2.一百多年来,夹头型机构已经被广泛用于各种装置和机构中。夹头型机构的示例可以在许多装置中找到,包括但不限于:
3.·
铣床上用于保持工具的卡盘;
4.·
用于保持钻头的多钻头螺丝刀上的卡盘;
5.·
伸缩腿组件上的卡盘,用于锁定同心腿段相对于彼此的位置;
6.·
钻机上用于保持管柱的卡瓦;和
7.·
管状送入工具,例如美国专利号7,909,120(slack)和美国专利号10,081,989(slack)中描述的工具。
8.夹头型机构具有许多优点,包括以下:
9.·
工件相对于夹头机构的自定心;
10.·
工件相对于夹头机构的精确定心;
11.·
工件的强力夹持;
12.·
阻止工件被震松(即未拧紧);和
13.·
快速释放和更换被夹持工件的能力。
14.夹持工件外表面的夹头型机构通常称为外部夹头。夹住工件内表面的夹头型机构通常称为内夹头。
15.传统的夹头型机构通常包括两个接触部件:分段夹头组件(或者在此简称为“分段夹头”)和夹头接收器。夹头接收器的接触分段夹头的表面被构造为截头直圆锥的弯曲侧表面。接触夹头接收器的分段夹头的表面(即夹头段的表面)也构造为截头直圆锥的弯曲侧表面。分段夹头的各段用作夹头接收器和工件之间的楔形物(wedge)。
16.相对于夹头接收器在一个方向上向分段夹头施加轴向载荷将增加作用在工件上的夹持力。沿相反方向向分段夹头施加轴向载荷将促使夹头机构释放工件。轴向载荷可以通过工件施加到分段夹头上,就像普通钻机卡瓦那样(在这种情况下,工件是一段管子)。或者,轴向载荷可以主要通过独立于工件的方式施加到分段夹头上,如铣床上的普通卡盘一样。
17.如在本公开中所使用的,术语“夹头段”应理解为是指分段夹头的一段。给定分段夹头中的夹头段可以在物理上彼此分离,或者可以通过允许夹头段之间在一个或多个方向或指向上进行选定程度的相对运动的一些器件来联接。用于允许联接的夹头段之间相对运动的器件的非限制性示例包括提供一体的金属弹簧,以及使用两种或更多种具有不同弯曲刚度的材料形成夹头。
18.当夹头型机构用于夹持尺寸对应于夹头型机构的“标称”尺寸(通常对应于“标称”内径或外径)的工件时,当分段夹头位于沿夹头接收器长度的“标称”轴向参考位置时,夹头段将接触夹头接收器并开始夹持工件。在该标称参考位置,夹头段和夹头接收器的接触表面在沿着部件长度的每个轴向位置具有相同的半径,因此接触表面将重合。当轴向力施加到分段夹头上以增加夹持力时,夹头段和夹头接收器之间产生的接触应力分布将几乎均匀。出于本公开的目的,这种类型的接触状态将被称为“匹配接触”(如稍后参考图1a和2a进一步讨论的)。
19.当夹头型机构保持非标称尺寸的工件时,当分段夹头位于夹头接收器内远离标称轴向参考位置的轴向位置时,夹头段将接触夹头接收器并开始夹持工件。在每个轴向位置,夹头段和夹头接收器的接触表面的曲率半径将不同。当轴向力被施加到分段夹头以增加夹持力时,夹头段和夹头接收器之间形成的接触应力分布将不如工件具有标称尺寸的情况均匀。
20.对于内部夹头机构,如果工件的尺寸小于夹头的标称尺寸,则每个夹头段与夹头接收器的接触表面积将朝着每个夹头段的纵向中心减小。出于本公开的目的,这种类型的接触状况将被称为“中心接触”(如稍后参考图2b进一步讨论的)。
21.如果工件的尺寸大于夹头的标称尺寸,那么每个夹头段与夹头接收器的接触表面积将朝着每个夹头段的两个纵向边缘减小。出于本公开的目的,这种类型的接触状态将被称为“边缘接触”(如稍后参考图1c和2c进一步讨论的)。
22.对于外部夹头机构,如果工件的尺寸小于夹头的标称尺寸,则发生边缘接触(如图1c所示)。如果工件的尺寸大于夹头的标称尺寸,则发生中心接触(如图1b所示)。
23.如上所述,当工件与夹头的标称尺寸不同时,接触表面积的减小导致给定夹持力下最大接触应力的增加。与向中心接触状态的相同大小的轴向位置变化相比,在从匹配接触向边缘接触状态的给定轴向位置变化的情况下,最大接触应力的这种增加更加明显。当夹持力增加时,或者当工件被释放时,或者如果夹头机构允许相对旋转(例如在us 7,909,120中描述的管状送入工具中),接触表面之间会发生滑动。随着最大接触应力的增加,接触表面磨损或以其他方式损坏的风险也随之增加。为此,可以选择为某些夹头机构指定的工件的可接受尺寸范围,以产生匹配接触或中心接触,并避免边缘接触。
24.如果扭矩通过夹头机构在夹头接收器和工件之间传递,当处于中心接触状态时,与当夹头段处于匹配接触状态或边缘接触状态时的这种旋转趋势相比,每个夹头段将具有沿着大致平行于夹头机构的纵向轴线的轴线旋转的更大趋势。夹头段的这种旋转可能导致夹头机构卡住并削弱夹头机构快速释放工件的能力。因此,夹头段被描述为当在中心接触状态下时比在匹配接触状态或边缘接触状态下时具有更小的稳定性。
技术实现要素:
25.总体而言,本公开教导了夹头型机构的实施例,其中夹头段和夹头接收器之间的接触状态比在夹头段和夹头接收器上都具有锥形接触表面的现有技术的夹头型机构更少依赖于由该机构夹持的工件的尺寸。本公开还教导了用于选择接触夹头接收器的夹头段的表面构造的方法的实施例。
26.更具体地,本公开教导了夹头型机构,其中接触夹头段的夹头接收器的表面被构
造为截头直圆锥的弯曲侧表面,并且接触夹头接收器的每个夹头段的表面(该表面在本文中也被称为“夹头段接触表面”)被构造为具有曲率,当在横向地垂直于机构的纵向轴线的截面中观察时,该曲率沿着夹头段的轴向长度的至少一部分是不变的。在最一般的形式中,每个夹头段接触表面被构造为具有与锥形夹头接收表面的曲率相似的曲率的弧形,并且沿着平行于锥形夹头接收表面的锥度的线在其长度的至少一部分上突出。
27.本公开范围内的实施例包括夹头段,其中接触夹头接收器的表面至少部分地被构造为圆柱体的弯曲侧表面,其中在一些实施例中圆柱体可以是倾斜的圆柱体,在其他实施例中可以是直圆柱体。如本公开中所使用的:
28.·
术语“倾斜圆柱体”(或“occ”)应理解为表示具有两个直径相等的平面圆形基部的圆柱体,这两个基部相互平行,并且“occ”轴线在基部中心之间延伸,其中occ轴线不垂直于基部;
29.·
术语“直圆柱体(right circular cylinder)”(或“rcc”)应理解为表示具有两个直径相等的平面圆形基部的圆柱体,这两个基部相互平行,并且“rcc”轴线在基部的中心之间延伸,其中rcc轴线垂直于基部;和
30.·
术语“圆柱形表面”应理解为表示倾斜或直角圆柱体的弯曲侧表面,不包括圆柱体的基部的表面。
31.圆柱体的倾斜角应理解为表示occ或rcc轴线(视情况而定)与从基部中心延伸的法向矢量之间的角度。对于直圆柱体(rcc),倾斜角为零。对于斜圆柱体(occ),倾斜角不为零。
32.术语“夹头接收器接触表面”应理解为表示夹头接收器接触夹头段的表面。
33.对于外部和内部夹头机构,每个夹头段的圆柱形表面的轴线和锥形夹头接收器接触表面的轴线之间的角度可以选择成等于锥形夹头接收器接触表面的锥角。
34.可以基于夹头机构的设计目标来选择夹头段的圆柱形表面的半径,以优化接触应力分布。对于外部夹头机构,每个夹头段上的圆柱形表面的半径可以选择成与锥形夹头接收器接触表面的最小半径紧密配合。对于内部夹头机构,每个夹头段上的圆柱形表面的半径可以选择成与锥形夹头接收器接触表面的最大半径紧密配合。
35.可以基于夹头型机构的特定设计目标来选择限定每个夹头段的接触表面的一部分的圆柱体的倾斜角也,以优化接触应力分布。在根据本公开的一个实施例中,倾斜角被选择为等于锥形夹头接收器接触表面的锥角,并且每个夹头段上的接触表面的所得部分是倾斜圆柱形表面的一部分。在另一个实施例中,倾斜角被选择为小于锥形夹头接收器接触表面的锥角,例如,倾斜角等于零,并且每个夹头段的接触表面的所得部分是直圆柱表面的一部分。在另一个实施例中,倾斜角被选择为大于锥形夹头接收器接触表面的锥角。
36.作为进一步的解释,接触应力分布可以通过根据以下原理选择与夹头接收器接触的夹头段上的圆柱表面的倾斜角和半径来优化:
37.·
对于内部夹头:
38.o减小倾斜角或半径将使夹头段和夹头接收器之间的接触状态在远离中心接触和朝向边缘接触的方向上发生偏差;和
39.o增加倾斜角度或半径将使夹头段和夹头接收器之间的接触状态在远离边缘接触和朝向中心接触的方向上发生偏差。
40.·
对于外部夹头:
41.o减小倾斜角或半径将使夹头段和夹头接收器之间的接触状态在远离边缘接触和朝向中心接触的方向上发生偏差;和
42.o增加倾斜角度或半径将使夹头段和夹头接收器之间的接触状态在远离中心接触和朝向边缘接触的方向上发生偏差。
43.对本领域技术人员来说显而易见的是,当每个夹头段的圆柱表面的倾斜角选择为等于夹头接收器的锥形接触表面的锥角时,匹配接触将发生在轴向位置处,在那里,夹头接收器的半径等于为夹头段的接触圆柱表面选择的半径(例如,对于外部夹头机构在最小的圆锥半径处,对于内部夹头机构在最大的圆锥半径处),与工件大小无关。
44.为了进一步解释的目的,使用内部夹头作为示例,当倾斜角被选择为小于锥角时,夹头段和夹头接收器之间的接触将倾向于朝向边缘接触的方向。然而,与现有技术的在夹头段和夹头接收器上具有锥形接触表面的内部夹头中出现的边缘接触不同,朝向边缘接触的偏置程度与工件尺寸无关,并且通过选择接触夹头接收器的夹头段的圆柱形表面的倾斜角和半径来控制。
45.当倾斜角被选择为大于锥角时,夹头段和夹头接收器之间的接触将趋向于中心接触。然而,与现有技术的在分段夹头和夹头接收器上都具有锥形接触表面的夹头中出现的中心接触不同,朝向中心接触的偏置程度与工件尺寸无关,并且通过选择接触夹头接收器的夹头段的圆柱形表面的倾斜角和半径来控制。
46.因此,根据本发明的夹头型机构可以被设计成使得与在夹头段上以及夹头接收器上具有锥形接触表面的其它类似的现有技术夹头机构相比,分段夹头和夹头接收器之间的接触应力分布较少依赖于工件尺寸的变化。因为夹头段的圆柱形表面沿其长度具有恒定的半径,而锥形夹头接收器接触表面沿其长度具有变化的半径,所以接触状态沿夹头的轴向长度变化,同时也与工件尺寸无关。因此,夹头段可以设计成当在夹头机构和将以其他方式导致与现有技术的夹头机构的中心接触状态的工件尺寸的工件之间传递扭矩时,具有更大的稳定性。
47.这种增加的稳定性是由于在横向方向上提供了更大的接触宽度。相同的夹头段还可以为会以其他方式导致与现有技术夹头的边缘接触的工件尺寸提供较低的接触应力。这种较低的接触应力是由于减少和/或消除了边缘接触并提供了较大的接触表面积。中心接触也相应增加,这提供了逐渐收敛的接触表面,其可以增强允许相对旋转的夹头型机构的润滑(例如,在us7,909,120中描述的类型的管状送入工具中)。
48.因此,总的来说,本公开教导了一种夹头型机构,其包括限定夹头接收器接触表面的夹头接收器,该夹头接收器接触表面被构造为截头直圆锥的弯曲侧表面,以及包括多个夹头段的分段夹头组件。每个夹头段限定:
49.·
工件接合表面,其被构造为与将由夹头型机构夹持的工件接合;和
50.·
夹头段接触表面,其被构造用于与夹头接收器接触表面的至少部分接触接合,其中,当在横向地垂直于夹头机构的纵向轴线的截面中观察时,所述夹头段接触表面的曲率沿着夹头段的轴向长度的至少一部分是不变的。
51.在一些实施例中,每个夹头段接触表面至少部分地被构造为圆柱体的弯曲侧表面的一部分,该圆柱体可以是倾斜的圆柱体或直圆柱体。
52.在其他实施例中,每个夹头段接触表面包括轴向邻接的第一和第二表面区域,其中第一表面区域至少部分地被构造为倾斜圆柱体或直圆柱体的弯曲侧表面的一部分;并且第二表面区域至少部分地被构造为截头直圆锥的弯曲侧表面的一部分。
53.根据本公开的夹头型机构可以被构造为用于夹持工件的内部圆柱表面的“内部”夹头机构,或者被构造为用于夹持工件的外部圆柱表面的“外部”夹头机构。因此,根据本公开的夹头型机构可以结合在内部夹持的管状送入工具中,例如:
54.·
内部夹持管状送入工具,包括:
55.o限定外心轴表面的细长心轴,该外心轴表面被构造为限定对应于截头圆锥的弯曲表面的多个心轴接触表面(使得根据本教导,心轴有效地充当夹头接收器);和
56.o多个卡瓦元件,每个卡瓦元件具有:
57.·
外工件接合表面,其被构造为与管状工件的内表面夹持接合;和
58.·
多个内表面区域,每个内表面区域被构造为用于与对应的一个心轴接触表面接触接合,每个内表面区域的至少一部分被构造为对应于圆柱体的弯曲表面,该圆柱体可以是倾斜的圆柱体或直圆柱体(使得根据本教导,卡瓦有效地用作夹头段)。
59.以及:
60.·
外部夹持管状送入工具,包括:
61.o细长的、大致圆柱形的心轴,该心轴具有限定多个心轴接触表面的内孔,这些心轴接触表面被构造为对应于截头圆锥的弯曲表面(使得根据本教导,心轴有效地充当夹头接收器);和
62.o多个卡瓦组件,每个卡瓦组件包括模具和夹爪,其中:
63.·
每个模具限定一内工件接合表面,该内工件接合表面被构造为与管状工件的外表面夹持接合;和
64.·
每个夹爪限定了外接触表面区域,该外接触表面区域被构造为用于与对应的一个心轴接触表面接触接合,每个外表面区域的至少一部分被构造为对应于圆柱形的弯曲表面,该圆柱体可以是倾斜的圆柱体或直圆柱形(使得根据本发明,卡瓦有效地用作夹头段)。
附图说明
65.现在将参考附图描述根据本公开的实施例,其附图标记表示相似的部件,并且在附图中:
66.图1a是穿过包括夹头接收器和分段夹头的外部夹头的横截面的详细视图,其示出了夹头接收器和分段夹头的一个段之间的“匹配接触”状态。
67.图1b是穿过类似于图1a的外部夹头的横截面的详细视图,但是示出了夹头接收器和夹头段之间的“中心接触”状态。
68.图1c是穿过类似于图1a的外部夹头的横截面的详细视图,但是示出了夹头接收器和夹头段之间的“边缘接触”状态。
69.图2a是穿过包括夹头接收器和分段夹头的内部夹头的横截面的详细视图,其示出了夹头接收器和分段夹头的一个段之间的“匹配接触”状态。
70.图2b是穿过类似于图2a的内部夹头的横截面的详细视图,但是示出了夹头接收器和夹头段之间的“中心接触”状态。
71.图2c是穿过类似于图2a的内部夹头的横截面的详细视图,但是示出了夹头接收器和夹头段之间的“边缘接触”状态。
72.图3a是根据本公开的外部夹头的第一实施例的纵向截面图,其示出了外部夹头接合工件,该工件具有外部夹头被设计为夹持的最大外径。
73.图3b是图3a中夹头和工件的等距视图。
74.图4a是穿过图3a中的外部夹头的纵向截面图,其示出了与工件接合的夹头,该工件具有外部夹头被设计成夹持的最小外径。
75.图4b是图4a中的外部夹头和工件的等距视图。
76.图5a是图3a所示外部夹头的夹头段的等距视图。
77.图5b是图5a所示的夹头段的纵向正视图。
78.图6a是根据本公开的内部夹头的第一实施例的纵向截面图,其示出了内部夹头接合工件,该工件具有内部夹头被设计成夹持的最小内径。
79.图6b是图6a的内部夹头和工件的等距视图。
80.图7a是穿过图6a的内部夹头的纵向截面图,其示出了与工件接合的夹头,该工件具有内部夹头被设计成夹持的最大内径。
81.图7b是图7a中的内部夹头和工件的等距视图。
82.图8a是图6a所示的内部夹头的夹头段的等距视图。
83.图8b是图8a的夹头段的纵向截面图。
84.图9a和9b分别是通过内部夹持管状送入工具的等距局部截面和纵向截面,该内部夹持管状送入工具通常如国际公开号wo 2010/006441(其内容在如此允许的管辖范围内被完整地并入本文)中的图8和9所示,其被修改以并入根据本公开的特征,示出了管状送入工具的夹持组件在与其开始内部夹持接合之前定位在管状工件的孔内。
85.图10是图9a和9b所示的管状送入工具的一个一体卡瓦的等距自由体视图,结合了根据本发明的特征。
86.图11a和11b分别是通过内部夹持管状送入工具的透视图和纵向截面图,该内部夹持管状送入工具通常如在us 7,909,120和us 10,081,989(二者的内容在如此允许的管辖范围内被完整地并入本文)中所公开的,其被修改以并入根据本公开的特征,管状送入工具的夹持组件在与其开始外部夹持接合之前设置在管状工件的上部外表面周围。
87.图12是图11a和11b所示的管状送入工具的一个一体卡瓦的等距自由体视图,其结合了根据本公开的特征。
具体实施方式
88.夹头接触几何形状和接触应力
–
概述
89.夹头段和夹头接收器之间的接触几何形状和接触应力可以使用公开文本中发现的接触力学分析方程进行理论预测,例如:
90.·
budynas,richard g.and nisbett,j.keith,shigley's mechanical engineering design,10
th ed.(new york:mcgraw
‑
hill education,2014);和
91.·
boresi,arthur p.and sidebottom,omar m.,advanced mechanics of materials,4
th ed.(new york:john wiley&sons,1985)。
92.有限元分析软件工具也可以用于预测接触几何形状和接触应力,并且可以提供比某些夹头型机构的分析方程更精确的预测。
93.图1a是穿过外部夹头机构100的横截面,该外部夹头机构包括具有内表面111的夹头接收器110,以及包括多个夹头段120的分段夹头,每个夹头段具有外表面121。图1a示出了夹头接收器110和夹头段120之一之间的匹配接触状态。在如图1a所示的外部夹头的匹配接触状态下,夹头段120的外表面121具有与夹头接收器110的内表面111相同的曲率半径。
94.图1b类似于图1a,但是它示出了夹头接收器110和夹头段120之间的中心接触状态。在如图1b所示的外部夹头的中心接触状态下,夹头段120的外表面121具有比夹头接收器110的内表面111更小的曲率半径。
95.图1c类似于图1a,但是示出了夹头接收器110和夹头段120之间的边缘接触状态。在如图1c所示的外部夹头的边缘接触状态下,夹头段120的外表面121具有比夹头接收器110的内表面111更大的曲率半径。
96.图2a是穿过内部夹头机构200的横截面,该内部夹头机构200包括具有内表面211的夹头接收器210,以及包括多个夹头段220的分段夹头,每个夹头段具有外表面221。图1a示出了夹头接收器210和夹头段220之一之间的匹配接触状态。在如图2a所示的内部夹头的匹配接触状态下,夹头段220的内表面221具有与夹头接收器210的外表面211相同的曲率半径。
97.图2b类似于图2a,但是示出了夹头接收器210和夹头段220之间的中心接触状态。在如图2b所示的内部夹头的中心接触状态下,夹头段220的内表面221具有比夹头接收器210的外表面211更大的曲率半径。
98.图2c类似于图2a,但是示出了夹头接收器210和夹头段220之间的边缘接触状态。在如图2c所示的内部夹头的边缘接触状态下,夹头段220的内表面221具有比夹头接收器210的外表面211更小的曲率半径。
99.实施例#1
–
外部夹头机构
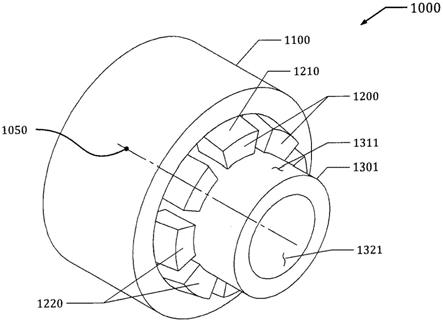
100.图3a和4a是穿过根据本公开的外部夹头机构的实施例1000的纵向截面图。外部夹头1000具有纵向轴线1050,并且包括夹头接收器1100和包括多个夹头段1200的分段夹头。夹头接收器1100具有限定夹头接收器接触表面1110的孔,夹头接收器接触表面1110被构造为截头直圆锥的弯曲侧表面。
101.每个夹头段1200具有径向外部夹头段接触表面1210,其包括第一表面区域1211和第二表面区域1212,第二表面区域1212与第一表面区域1211轴向邻接。第一和第二表面区域1211和1212被构造为与夹头接收器接触表面1110接触,如本文后面更详细描述的。每个夹头段1200还具有径向内部工件接合表面1220,该接合表面1220被适当地构造为用于夹持管状工件的外表面。
102.在图3a中,外部夹头1000被示出为夹头段1200的工件接合表面1220与工件1302的外表面1312夹持接合,工件1302的外表面1312具有对应于夹头1000被设计为夹持的最大外径的外径。出于本公开的目的,图3a中示出的夹头段1200的位置,即夹头段接触表面1210和夹头接收器接触表面1110之间的接触区域的轴向长度最大的位置,被称为缩回位置。
103.图3b是如图3a所示的外部夹头1000夹持地接合工件1302的等距视图。
104.在图4a中,外部夹头1000被示出为夹头段1200的工件接合表面1220与工件1301的
外表面1311夹持接合,工件1301的外表面1311具有对应于夹头1000被设计为夹持的最小外径的外径。出于本公开的目的,在图4a中示出夹头段1200的位置,即夹头段接触表面1210和夹头接收器接触表面1110之间的接触区域的轴向长度最小的位置,被称为延伸位置。
105.图4b是如图4a所示的外部夹头1000夹持地接合工件1301的等距视图。
106.图5a和5b进一步示出了外部夹头1000的典型夹头段1200。如前所述,每个夹头段1200具有夹头段接触表面1210,其包括第一和第二表面区域1211和1212。第一表面区域1211具有轴向长度loc,并且被构造为occ的弯曲侧表面的一部分。第二表面区域1212具有轴向长度lc,并且被构造为截头直圆锥的弯曲侧表面的一部分。
107.可以选择第二表面区域1212的轴向长度lc和半径rc1和rc2,使得当夹头段1200处于其延伸位置时,第二表面区域1212的构造与夹头接收器接触表面1110的构造相匹配。如此选择,第二表面区域1212的锥角将等于夹头接收器接触表面1110的锥角。
108.第一表面区域1211的半径roc可以等于第二表面区域1212的半径rc1。用于限定第一表面区域1211的occ的倾斜角可以被选择为等于用于限定夹头接收器接触表面1110的截头直圆锥的锥角。
109.实施例#2
–
内部夹头机构
110.图6a和图7a是穿过根据本发明构造的内部夹头机构的实施例2000的纵向截面图。内部夹头2000具有纵向轴线2050,并且包括夹头接收器2100和包括多个夹头段2200的分段夹头。夹头接收器2100具有限定夹头接收器接触表面2110的外表面,夹头接收器接触表面2110被构造为截头直圆锥的弯曲侧表面。
111.每个夹头段2200具有径向内部夹头段接触表面2210,其包括第一表面区域2211和第二表面区域2212,第二表面区域2212与第一表面区域2211轴向邻接。第一和第二表面区域2211和2212被构造为与夹头接收器接触表面2110接触,如本文后面更详细描述的。每个夹头段2200还具有径向外部工件接合表面2220,该工件接合表面2220被适当地构造为用于夹持管状工件的内表面。
112.在图6a中,内部夹头2000被示出为夹头段2200的工件接合表面2220与工件2301的内表面2321夹持接合,工件2301的内表面2321具有对应于夹头2000被设计为夹持的最小内径的内径。出于本公开的目的,图6a中示出的夹头段2200的位置,即夹头段接触表面2210和夹头接收器接触表面2110之间的接触区域的轴向长度最大的位置,被称为缩回位置。
113.图6b是如图6a所示的示出为夹持地接合工件2301的内部夹头2000的等距视图。
114.在图7a中,内部夹头2000被示出为夹头段2200的工件接合表面2220与工件2302的内表面2322夹持接合,工件2302具有夹头2000被设计为夹持的最大内径。出于本公开的目的,图7a中示出的夹头段2200的位置,即夹头段接触表面2210和夹头接收器接触表面2110之间的接触区域的轴向长度最小的位置,被称为延伸位置。
115.图7b是示出为夹持地接合工件2302的内部夹头2000的等距视图。
116.图8a和8b还示出了内部夹头2000的典型夹头段2200。如前所述,每个夹头段2200具有夹头段接触表面2210,其包括第一和第二表面区域2211和2212。第一表面区域2211具有轴向长度loc,并且被构造为occ的一部分。第二表面区域2212被构造为截头直圆锥的弯曲侧表面的一部分。
117.可以选择第二表面区域2212的轴向长度lc和半径rc1和rc2,使得当夹头段2200处
于其延伸位置时,第二表面区域2212的构造与夹头接收器接触表面2110的构造相匹配。如此选择,第二表面区域2212的锥角将等于夹头接收器接触表面2110的锥角。
118.第一表面区域2211的半径roc可以等于第二表面区域2212的半径rc1。用于限定第一表面区域2211的occ的倾斜角可以被选择为等于用于限定夹头接收器接触表面2110的截头直圆锥的锥角。
119.实施例#3
–
内部夹持套管送入工具
120.图9a和9b描绘了类似于wo 2010/006441中图8和9所示的现有技术管状送入工具的内部夹持套管送入工具(或“crt”)3000,但是结合了根据本公开的内部夹头型机构,以夹持具有内表面3310和外表面3320的管状套管工件3300。
121.crt3000包括心轴3100,心轴3100用作类似于这里的内部夹头机构2000的夹头接收器2100的夹头接收器。心轴3100的外表面3110的构造包括多个截头直圆锥。
122.crt3000还包括作为夹头段的一体卡瓦3200(替代地,这里也称为卡瓦元件)。一体卡瓦3200具有外表面3220,该外表面3220被适当地构造为夹持套管3300的内表面3310。如图9b和10所示,一体卡瓦3200具有接触心轴3100的外表面3110的多个内表面区域3210。内表面区域3210被构造为occ表面。用于限定一体卡瓦3200的内表面区域3210的occ表面的倾斜角可以选择为等于用于限定心轴3100的外表面3110的截头直圆锥的锥角。
123.实施例#4
–
外部夹持套管送入工具
124.图11a和11b描绘了类似于在us 7,909,120和us 10,081,989中公开的现有技术管状送入工具的外部夹持crt 4000,但是结合了根据本公开的外部夹头型机构以夹持具有内表面4310和外表面4320的管状套管工件4300。
125.crt4000包括心轴4100,心轴4100用作类似于这里的外部夹头机构1000的夹头接收器1100的夹头接收器。心轴4100具有内表面4110,该内表面4110被构造为限定多个截头直圆锥。
126.crt4000还包括作为夹头段的卡瓦组件4200,每个卡瓦组件4200包括夹爪4201和模具4202。卡瓦4200的每个模具4202上的内表面4220被适当地构造为夹持套管4300的外表面4320。如图11b和12所示,卡瓦4200在卡爪4201上具有多个外表面区域4210,其接触心轴4100的内表面4110。外表面区域4210被构造为occ表面。用于限定卡瓦4200的外表面区域4210的occ表面的倾斜角可以选择成等于用于限定心轴4100的内表面4110的截头直圆锥的锥角。
127.本领域的技术人员将容易理解,在不脱离本教导的范围的情况下,可以对根据本公开的实施例进行各种修改,例如但不限于可以使用此后构思或开发的等效材料的修改、具有不同数量的夹头段的分段夹头、或者被构造为与不同尺寸或构造的工件接合的夹头。应当特别理解的是,本公开的范围并不旨在限于所描述或示出的实施例,并且在功能上没有任何实质性结果变化的情况下,所要求保护或示出的元件或特征的变型的替换将不构成对本公开范围的偏离。
128.在本专利文献中,词语“包括”的任何形式应理解为其非限制性含义,意味着包括该词语之后的任何元件或特征,但未具体提及的元件或特征不排除在外。不定冠词“一”对元件或特征的引用不排除存在多于一个这样的元件或特征的可能性,除非上下文明确要求存在一个并且只有一个这样的元件或特征。任何形式的术语“连接”、“接合”、“联接”、“附
接”或描述元件之间相互作用的任何其他术语的使用并不意味着将相互作用限制为主题元件之间的直接相互作用,并且还可以包括元件之间的间接相互作用,例如通过辅助或中间结构。
129.诸如“垂直的”、“平行的”、“圆柱形的”和“相等的”之类的关系和构象术语并不旨在表示或要求绝对的数学或几何精度。因此,这些术语应被理解为仅表示或要求相当高的精度(例如,“基本垂直的”),除非上下文另有明确要求。无论在本文献中何处使用,术语“典型的”和“典型地”应被在代表通常的用法或实践的意义上进行解释,而不应被理解为暗示本质性或不变性。
130.所示元件的列表
131.元件号
ꢀꢀꢀꢀꢀ
描述
132.100
ꢀꢀꢀꢀꢀꢀꢀꢀ
外部夹头型机构
133.110
ꢀꢀꢀꢀꢀꢀꢀꢀ
夹头接收器
134.111
ꢀꢀꢀꢀꢀꢀꢀꢀ
接触分段夹头的夹头接收器表面(“夹头接收器接触表面”)
135.120
ꢀꢀꢀꢀꢀꢀꢀꢀ
夹头段
136.121
ꢀꢀꢀꢀꢀꢀꢀꢀ
接触夹头接收器的夹头段的表面(“夹头段接触表面”)
137.200
ꢀꢀꢀꢀꢀꢀꢀꢀ
内部夹头型机构
138.210
ꢀꢀꢀꢀꢀꢀꢀꢀ
夹头接收器
139.211
ꢀꢀꢀꢀꢀꢀꢀꢀ
接触分段夹头的夹头接收器的表面(“夹头接收器接触表面”)
140.220
ꢀꢀꢀꢀꢀꢀꢀꢀ
夹头段
141.221
ꢀꢀꢀꢀꢀꢀꢀꢀ
接触夹头接收器的夹头段的表面(“夹头段接触表面”)
142.1000
ꢀꢀꢀꢀꢀꢀꢀ
外部夹头型机构
143.1050
ꢀꢀꢀꢀꢀꢀꢀ
外部夹头型机构的纵向轴线
144.1100
ꢀꢀꢀꢀꢀꢀꢀ
夹头接收器
145.1110
ꢀꢀꢀꢀꢀꢀꢀ
接触分段夹头的夹头接收器的表面(“夹头接收器接触表面”)
146.1200
ꢀꢀꢀꢀꢀꢀꢀ
夹头段
147.1210
ꢀꢀꢀꢀꢀꢀꢀ
接触夹头接收器的夹头段的表面(“夹头段接触表面”)
148.1211
ꢀꢀꢀꢀꢀꢀꢀ
表面1210的倾斜圆柱区域
149.1212
ꢀꢀꢀꢀꢀꢀꢀ
表面1210的直圆锥区域
150.1220
ꢀꢀꢀꢀꢀꢀꢀ
接触工件的分段夹头的表面(“工件接合表面”)
151.1301
ꢀꢀꢀꢀꢀꢀꢀ
夹头1000被设计为夹持的具有最小外径的工件
152.1311
ꢀꢀꢀꢀꢀꢀꢀ
工件1301的外表面
153.1321
ꢀꢀꢀꢀꢀꢀꢀ
工件1301的内表面
154.1302
ꢀꢀꢀꢀꢀꢀꢀ
夹头1000被设计为夹持的具有最大外径的工件
155.1312
ꢀꢀꢀꢀꢀꢀꢀ
工件1302的外表面
156.1322
ꢀꢀꢀꢀꢀꢀꢀ
工件1302的内表面
157.2000
ꢀꢀꢀꢀꢀꢀꢀ
内部夹头型机构
158.2050
ꢀꢀꢀꢀꢀꢀꢀ
内部夹头型机构的纵向轴线
159.2100
ꢀꢀꢀꢀꢀꢀꢀ
夹头接收器
160.2110
ꢀꢀꢀꢀꢀꢀꢀ
接触分段夹头的夹头接收器的表面(“夹头接收器接触表面”)
161.2211
ꢀꢀꢀꢀꢀꢀꢀ
表面2210的圆柱区域
162.2212
ꢀꢀꢀꢀꢀꢀꢀ
表面2210的直圆锥区域
163.2200
ꢀꢀꢀꢀꢀꢀꢀ
夹头段
164.2210
ꢀꢀꢀꢀꢀꢀꢀ
接触夹头接收器的夹头段的表面(“夹头段接触表面”)
165.2220
ꢀꢀꢀꢀꢀꢀꢀ
接触工件的分段夹头的表面(“工件接合表面”)
166.2301
ꢀꢀꢀꢀꢀꢀꢀ
夹头2000被设计为夹持的具有最小外径的工件
167.2311
ꢀꢀꢀꢀꢀꢀꢀ
工件2301的外表面
168.2321
ꢀꢀꢀꢀꢀꢀꢀ
工件2301的内表面
169.2302
ꢀꢀꢀꢀꢀꢀꢀ
夹头2000被设计为夹持的具有最大外径的工件
170.2312
ꢀꢀꢀꢀꢀꢀꢀ
工件2302的外表面
171.2322
ꢀꢀꢀꢀꢀꢀꢀ
工件2302的内表面
172.3000
ꢀꢀꢀꢀꢀꢀꢀ
内部夹持套管送入工具
173.3100
ꢀꢀꢀꢀꢀꢀꢀ
心轴
174.3110
ꢀꢀꢀꢀꢀꢀꢀ
接触一体卡瓦的心轴的表面
175.3200
ꢀꢀꢀꢀꢀꢀꢀ
一体卡瓦(“卡瓦元件”)
176.3210
ꢀꢀꢀꢀꢀꢀꢀ
接触心轴的一体卡瓦的表面
177.3220
ꢀꢀꢀꢀꢀꢀꢀ
夹持套管的一体卡瓦的表面
178.3300
ꢀꢀꢀꢀꢀꢀꢀ
套管
179.3310
ꢀꢀꢀꢀꢀꢀꢀ
套管3300的外表面
180.3320
ꢀꢀꢀꢀꢀꢀꢀ
套管3300的内表面
181.4000
ꢀꢀꢀꢀꢀꢀꢀ
外部夹持套管送入工具
182.4100
ꢀꢀꢀꢀꢀꢀꢀ
心轴
183.4110
ꢀꢀꢀꢀꢀꢀꢀ
接触卡瓦的心轴的表面
184.4200
ꢀꢀꢀꢀꢀꢀꢀ
卡瓦组件
185.4201
ꢀꢀꢀꢀꢀꢀꢀ
卡爪
186.4202
ꢀꢀꢀꢀꢀꢀꢀ
模具
187.4210
ꢀꢀꢀꢀꢀꢀꢀ
接触心轴的夹爪上的卡瓦的表面
188.4220
ꢀꢀꢀꢀꢀꢀꢀ
夹持套管的模具上的卡瓦的表面
189.4300
ꢀꢀꢀꢀꢀꢀꢀ
套管
190.4310
ꢀꢀꢀꢀꢀꢀꢀ
套管4300的外表面
191.4320
ꢀꢀꢀꢀꢀꢀꢀ
套管4300的内表面
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1