无线通信采油装置及无线通信方法与流程
1.本发明涉及油气田开采技术领域,具体涉及无线通信采油或采气装置及无线通信方法,还涉及一种用于井下数据无线上传的抽油泵体或抽气泵体。
背景技术:
2.由于国内油田普遍具有多层、非均质性特点,为保证油田能够被充分地开采,采油井下的数据监测显得非常重要。随着自动化采油技术的不断应用和发展,国内采油技术检测已实现了井下参数监测。并保证油田井下设备能够正常采油。
3.目前自动化采油技术检测主要采用预置电缆为井下通讯设备进行供电,并进行地面与井下测控信号的传输,目前有缆数字式检测工艺需在油管外捆绑电缆施工,存在现场施工作业复杂、施工效率低、带压作业难度大等问题。而无缆数字传输工艺在需要下井录取历史数据或调整参数时,则必须动用测井车,使用传统方法下电缆和仪器完成作业。
4.现阶段的无线井下工况及参数监测通常采用独立的两个步骤,首先通过传感器或者数据采集终端采集井下设备的工况和相关参数,将工况和参数传输至无线通信模块;然后,无线通信模块以电磁波/声波为载体,并以井下环境(井下流体、地层、井下气体)为电磁波/声波的传输媒介,将工况和参数传输至地面设备。例如,公开号为cn2869822y的中国专利文献公开的螺杆泵井光杆的扭矩、转速、轴向力无线通信测量装置,其包括传感器、信号发射系统和主机。传感器用于采集轴向力参数和扭矩参数,传感器采集的模拟信号经过放大和模数转换后输入无线通信模块,然后经由信号发射系统发射无线电波,从而实现无线传输。例如,公开号为cn112682028a的中国专利文献公开了一种抽油井有杆泵泵功图实时测试与无线传输装置及方法,装置包括电池组、磁致声能转换器、系统电源、位移传感器、电路板、载荷传感器、壳体和地面控制器,其中位移传感器和载荷传感器用于传感杆泵的位移和载荷参数,然后通过电路将位移和载荷参数的信号传输至磁致声能转换器,将位移和载荷参数转换为声波信号,其中声波信号耦合至抽油杆,并通过抽油杆传输至地面,即声波信号以抽油杆为传输媒介实现无线通信。例如,公开号为cn107795304b的中国专利文献公开了一种多层同采管柱及其使用方法。该管柱包括多个连接油管,由上至下通过连接油管顺次连接并导通的上采油管段、下采油管段和井底管段,信号接收装置、信号发射装置、上油层多参数测试仪、下油层多参数测试仪。上采油管段包括分采泵上泵和偏心进油阀,分采泵上泵连接至抽油杆,下采油管段包括与分采泵上泵通过连接杆连接的分采泵下泵、分采泵固定阀、过电缆封隔器、单向阀和筛管。信号发射装置位于分采泵上泵上游,上油层多参数测试仪位于偏心进油阀和分采泵下泵之间,下油层多参数测试仪位于过电缆封隔器和单向阀之间,信号接收装置悬挂在油套环空中并与信号发射装置无线连接。
5.但是,由于井下套筒内包含泥浆、水垢、油、水以及气泡,因此井筒内的流体在大部分情况下处于非均匀状态,并且由于地层、钻柱和油层等因素影响,以电磁波或者声波的方式传输信息存在可靠性差、传输距离短、不易维修更换等缺陷。
6.此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于发明人做出
本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
技术实现要素:
7.针对现有技术之不足,本发明提供一种无线通信采油装置,包括:
8.泵体,用于将井下流体举升至地面,其通过杆体与抽油设备连接;
9.通信模块,其位于所述泵体内部,并配置为:
10.以控制所述泵体内部与外部的连通/阻断从而改变所述泵体对所述杆体施加的作用力的方式将信息调制于所述抽油设备的负载波动中。现阶段关于采油井下设备工况和井下参数的监测,通常将工况和参数调制于电磁波\声波作为信息的载体,电磁波/声波通过井下流体、套管、油管、杆体等传输媒介传输至地面。然而,一方面由于井下介质成分较多,地层和油层特性分布复杂,存在不均匀的情况,再加之井下恶劣的高温、高压环境,电磁波/声波在井下传输时衰减和干扰很大,信号传输到地面或者井下时极其微弱,并且大地背景噪声和井下的高频/低频干扰,使得信号的准确提取存在很大的困难,即使采用超低频电磁波进行通信,噪声也很难滤除。而本发明将对工况的监测和信息的上传两个步骤融合,即通过工况本身的变化传输信息。以井下设备本身的工况作为信息传输的载体,可以在监测工况之后,通过主动改变泵体等采油装置对杆体施加的作用力,使得地面的抽油设备功率发生变化,或者使得杆体的悬点的载荷发生变化,从而在地面一侧通过监测抽油设备的功率或者杆体悬点的载荷就能够获取井下上传的信息。本发明将信息调制于泵体对杆体作用力的方式,没有采用电磁波或者声波作为信息的载体,能够避免电磁波/声波在井下传输衰减和干扰较大的缺陷。
11.本发明还提供一种无线通信采油装置,包括:
12.泵体,其设置于井下,并通过杆体与抽油设备连接;
13.通信模块,其设置于所述泵体内部,并包括与所述杆体直接或间接连接的阻力件。优选地,所述通信模块配置为控制所述阻力件改变所述杆体运动时承受的作用力以使得所述抽油设备负载发生变化的方式传输信息/数据。
14.本发明还提供一种无线通信采油装置,包括:
15.泵体,其在抽油设备的驱动下随杆体往复运动;
16.通信模块,其设置于所述泵体内部,并包括与所述杆体直接或间接连接的发电单元。优选地,所述杆体往复运动能够带动发电单元内转子转动产生电能。所述通信模块配置为基于发电单元判断或识别杆体的运动状态。或者所述通信模块配置为通过发电单元改变所述杆体运动时承受的作用力以使得所述抽油设备负载发生变化的方式传输信息/数据。
17.根据一种优选实施方式,所述泵体套设于井下的套管内。所述泵体连接杆体的一侧与油管连接。或者所述泵体套设于油管内,所述油管套设于所述套管内。所述套管与所述油管之间构成环空所述泵体设置有用于与所述环空连通的泄油口。
18.根据一种优选实施方式,所述泵体包括泵桶、第一凡尔和第二凡尔。所述泵桶的一侧与杆体连接,另一侧设置有所述第一凡尔。所述第一凡尔与第二凡尔之间构成出油室。所述通信模块设置于所述出油室内,并且所述通信模块与泄油口连通。
19.根据一种优选实施方式,阀体设置于泄油口和/或所述通信模块与出油室的连通处。
20.根据一种优选实施方式,所述通信模块包括处理单元和电机。所述处理单元配置为按照能够驱动电机调整阀体的开度从而改变所述泵体对杆体作用力的方式将信息调制于杆体悬点载荷的波动中或者抽油设备的功率波动中。
21.根据一种优选实施方式,所述通信模块包括发电单元。所述泵体内从动于杆体的泵桶连接有能够进入所述发电单元的丝杠。或者所述杆体穿过泵桶的部分连接有能够进入所述发电单元的丝杠。在所述丝杠沿第一方向/第二方向运动的情况下,所述发电单元的转子按照能够在所述丝杠的带动下绕自身轴线转动的方式设置。
22.根据一种优选实施方式,所述通信模块配置为执行如下步骤:
23.获取监测数据;
24.按照预设的编码方式对监测数据编码;
25.基于编码指令控制阀体打开/关闭。或者基于编码指令控制发电单元增加负载以改变杆体运动时承受的作用力。
26.本发明还提供一种无线通信方法,用于将井下数据上传至地面,所述方法包括:
27.改变杆体运动时承受的作用力以使得抽油设备的负载发生变化的方式传输信息或数据。
附图说明
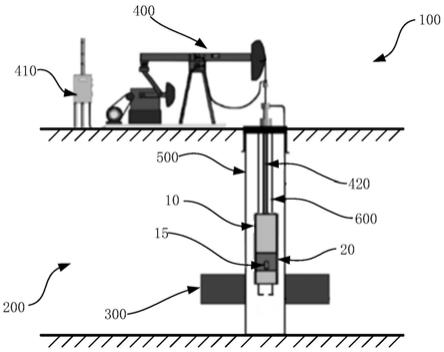
28.图1是本发明的一种优选应用场景的示意图;
29.图2是本发明的一种优选实施方式的结构示意图;
30.图3是本发明通信模块的一种优选实施方式的模块示意图;
31.图4是本发明通信模块的一种优选实施方式的结构示意图;
32.图5是本发明发电单元与丝杠连接的一种优选实施方式的结构示意图;
33.图6是本发明抽油设备正常工况下的功率波形示意图;
34.图7是本发明通信模块通过阀体传输信息情况下抽油设备的功率波形图;
35.图8是本发明通信模块通过发电单元或阻力件传输信息情况下手游设备的功率波形图。
36.附图标记列表
37.100:地面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:井下
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:油层
38.400:抽油设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500:套管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
600:油管
39.201:上接头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202:电路外筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203:穿线杆
40.204:电路隔离筒
ꢀꢀꢀꢀꢀꢀꢀꢀ
205:中间接头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206:电池内筒
41.207:定子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208:发电机外壳
ꢀꢀꢀꢀꢀꢀꢀꢀ
209:下接头
42.210:第一轴承外环
ꢀꢀꢀꢀꢀꢀ
211:第二轴承外环
ꢀꢀꢀꢀꢀꢀ
212:转子
43.213:轴承接头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
214:凹槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
215:凸体
44.216:控制阀组件
ꢀꢀꢀꢀꢀꢀꢀꢀ
410:控制模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420:杆体
45.421:丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
510:环空
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10:泵体
46.20:通信模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:第一凡尔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12:第二凡尔
47.13:泵桶
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14:出油室
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15:泄油口
48.21:处理单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22:发电单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23:传感单元
49.24:阀体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25:电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26:驱动单元
50.27:第一管体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
28:第二管体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
29:内置电池
具体实施方式
51.下面结合附图进行详细说明。
52.实施例1
53.本发明一个目的是实现石油工业中采油井井下数据可靠且稳定地无线上传,从而高效且低成本地获取井下工况和参数。
54.本发明提供一种无线通信采油装置,还可以是一种用于井下数据无线上传的抽油泵体。在不造成冲突或者矛盾的情况下,下述任一实施例的一个或多个特征可以与其他任一实施例的一个或多个特征组合,重复的内容不再赘述。
55.需要说明的是,本发明涉及信息的传输。本发明中所涉及的信息可以是井下工况和参数。在本发明中信息传输的实体是数据,即数据是运送信息的实体,具体表现为一系列有意义的符号序列。数据传输的方式可以是串行传输,还可以是并行传输。本发明所指的信号是数据的电气/电磁表现,是数据在传输过程中的存在形式。信号可以是模拟信号(连续信号)还可以是数字信号(离散信号)。例如,本发明可以通过传感单元23获取井下工况和参数等信息。井下工况和参数可以模拟信号的方式传输至处理单元21。处理单元21将获取的井下工况和参数进行处理形成数据,并以数字信号的方式传输。
56.优选地,调制是按照要传输的信息来改变一个或几个载体的参量。例如本发明的通信模块20可以配置为改变杆体420和/或泵体10内柱塞/泵桶13/杆体承受的作用力使得抽油设备400的负载发生变化的方式将信息加载/调制于抽油设备400的负载中。控制模块410可以按照将要传输的信息改变杆体420和/或泵体10内柱塞/泵桶13/杆体的运动状态。通信模块20可以按照将要传输的信息改变杆体420和/或泵体10内柱塞/泵桶13/杆体承受的作用力或者改变抽油设备400的负载。
57.本发明提供的无线通信采油或采气装置,包括泵体10和通信模块20。通信模块20设置于泵体10内。本发明提供的无线通信采油装置应用于石油抽取或者气体抽取。气体可以是天然气或者煤层气。本实施例以采油为例说明本发明的实施方式。本实施例涉及的抽油设备400还可以是抽气设备,泵体420可以用于抽油或者抽气。采油井可以替换为采气井。
58.参见图1,无线通信采油装置设置于采油井下。具体地,地面100设置有抽油设备400和控制模块410。井下20设置有套管500、油管600、杆体420和本发明的无线通信采油装置。控制模块410用于控制抽油设备400的运动状态。控制模块410还可以监测抽油设备400的功率变化。抽油设备400可以是抽油机,例如游梁式抽油机或者无游梁式抽油机。无梁式抽油机可以是链条式抽油机、钢绳抽油机、液压式抽油机、曲柄连杆式抽油机等。优选地,抽油设备400可以替换为抽气设备。抽气设备可以是游梁式抽气机无或者无游梁式抽气机。优选地,抽油设备400由做功装置驱动,例如举升电机。油管600和无线通信采油装置设置于套管500内。杆体420套设于油管600内。油管600与泵体10连接。杆体420与泵体10连接。优选地,杆体420可以是刚性的细长体,例如抽油杆。杆体420还可以是柔性的细长体,例如钢绳
或链条。优选地,套管500呈中空状。套管500的一端靠近地面,另一端位于井底。套管500的可以是圆柱体、多边形柱体。油管600呈中空状。油管600的径向截面可以是圆形或者多边形。作为优选地,泵体10还可以套设于油管600内。油管600远离地面一侧的端部由泵体10封堵。泵体320可以是杆式泵或者管式泵。
59.优选地,抽油设备400用于拉动或推动杆体420沿第一方向或第二方向运动。第一方向为朝向地面100一侧运动。第二方向为朝向井下200的井底一侧运动。优选地,抽油设备400通过杆体420拉动或推动泵体10内的部件沿第一方向或第二方向运动。更为具体地,抽油设备400与杆体420连接。杆体420与泵体10连接。优选地,抽油设备400带动杆体420沿第一方向或第二方向运动。优选地,抽油设备400带动杆体420沿第一方向运动为上冲程运动状态。抽油设备400带动杆体420沿第二方向运动为下冲程运动状态。优选地,抽油设备400停止时,杆体420也随之停止,此时处于停顿的运动状态。
60.优选地,泵体10包括第一凡尔11、第二凡尔12以及泵桶13,参见图2。优选地,泵桶13可以是柱塞。第一凡尔11和第二凡尔12可以是阀体,例如单向阀。又例如第一凡尔11可以是游动阀,第二凡尔12可以是固定阀。泵桶13朝向第二方向一侧设置有第一凡尔11。或者泵桶13的底部设置有第一凡尔11。杆体420与泵桶13连接。泵桶13能够随杆体420沿第一方向或第二方向运动。具体地,如果第一凡尔11/第二凡尔12第一方向一侧的压力小于第一凡尔11/第二凡尔12第二方向一侧的压力,第一凡尔11/第二凡尔12打开,流体可以通过第一凡尔11/第二凡尔12。如果第一凡尔11/第二凡尔12第一方向一侧的压力大于第一凡尔11/第二凡尔12第二方向一侧的压力,第一凡尔11/第二凡尔12关闭,流体无法通过第一凡尔11/第二凡尔。通过该设置方式,泵桶13沿第一方向和第二方向运动能够周期性地打开或关闭第一凡尔和第二凡尔,进而将油层300内的流体举升至地面100。
61.优选地,杆体420一方面可以仅与泵桶13连接,可以不延伸进入通信模块20或者第一凡尔11与第二凡尔12之间。另一方面杆体420可以穿过泵桶13并延伸至第一凡尔11和第二凡尔12之间。或者杆体420可以穿过泵桶13延伸至通信模块20内。优选地,还可以是杆体420与泵桶13的一侧连接。泵桶13相对杆体420的另一侧设置有泵杆。泵杆延伸至第一凡尔11和第二凡尔12之间。泵杆能够在泵桶13的带动下沿第一方向或第二方向运动。
62.优选地,抽油设备400带动泵体10内的泵桶13或者泵杆周期性地沿第一方向或第二方向运动。优选地,抽油设备400带动杆体420沿套管500/油管600的轴线/轴向运动。优选地,抽油设备400带动杆体420周期性地沿第一方向或第二方向运动。抽油设备400带动杆体420周期性地沿套管500/油管600的轴线上下运动。优选地,杆体420在抽油设备400的作用下沿套管500/油管600的轴向/轴线运动。优选地,杆体420在抽油设备400的作用下沿杆体420的轴向/轴线运动。优选地,泵体10内泵桶13或泵杆在杆体420的带动下沿杆体420的轴向/轴线运动。泵体10内泵桶13或泵杆在杆体420的带动下沿套管500/油管600的轴线/轴向运动。泵体10内泵桶13或泵杆在杆体420的带动下沿第一方向或者第二方向运动。泵体10内泵桶13或泵杆在杆体420的带动下周期性地沿第一方向或者第二方向运动。
63.优选地,泵体10用于将油层300内的原油举升至地面。通信模块20用于将井下设备的工况和参数上传至地面100。优选地,通信模块20将井下工况和参数上传至控制模块410。
64.优选地,泵体10以及部分杆体420设置于井下200。泵体10内泵桶13或者泵杆在抽油设备400的驱动下随杆体420沿第一方向或第二方向运动。或者泵体10内泵桶13或者泵杆
在抽油设备400的驱动下随杆体420朝向地面100一侧运动或者朝向井底一侧运动。优选地,本发明的泵体10的工作原理可以与管式泵/杆式泵相同。
65.优选地,通信模块20配置为基于控制泵体10内部与外部的连通/阻断以改变泵体10对杆体420作用力的方式将信息/数据调制于抽油设备400负载的变化中。优选地,通信模块20配置为基于控制泵体10内部与外部是否连通以改变杆体420承受作用力的方式传输信息/数据。优选地,通信模块20可以通过阀体24或者自身移动来控制泵体10内部与外部的连通/阻断。具体地,泵体10内泵桶13沿第一方向或第二方向运动的情况下可以将油层300内的流体举升至地面100。当通信模块20配置为关闭泵体10内部与外部的连通时,泵体10作为封闭的整体其对杆体420的作用力为其自重和其包含的流体的重量。当通信模块20配置为打开泵体10内部与外部的连通时,泵体10与外部连通,其对杆体420的作用力转化为泵体10内部与外部的压差,导致对杆体420的作用力增加,进而使得抽油设备400的负载增加。抽油设备400的负载增加导致其连接杆体420悬点处的载荷或者使得抽油设备400的功率增加。
66.优选地,在杆体420或者泵杆进入通信模块20内的情况下,通信模块20配置为增加或减小杆体420或泵杆运动时的阻力的方式传输信息/数据。优选地,在杆体420或者泵杆进入通信模块20内的情况下,通信模块20配置为基于改变杆体420或泵杆运动时阻力使得抽油设备400的负载发生变化的方式将信息/数据调制于抽油设备400负载的个中。具体地,通信模块20内可以设置与杆体420或者泵杆接触的元件,该元件能够阻碍杆体420或者泵杆的往复运动,进而导致抽油设备400的驱动杆体420运动时的正常负载发生波动,因此通过监测抽油设备400的负载波形就能够解析通信模块20发送的信息或数据。
67.优选地,以上通信模块20的配置方式可以是通信模块20内处理单元21的配置方式。
68.通过以上通信模块20或处理单元21传输信息/数据的设置方式,达到的有益效果是:
69.现阶段关于采油井下设备工况和井下参数的监测,通常将工况和参数调制于电磁波\声波作为信息的载体,电磁波/声波通过井下流体、套管500、油管600、杆体420等传输媒介传输至地面。然而,一方面由于井下介质成分较多,地层和油层特性分布复杂,存在不均匀的情况,再加之井下恶劣的高温、高压环境,电磁波/声波在井下传输时衰减和干扰很大,信号传输到地面或者井下时极其微弱,并且大地背景噪声和井下的高频/低频干扰,使得信号的准确提取存在很大的困难,即使采用超低频电磁波进行通信,噪声也很难滤除。而本发明将对工况的监测和信息的上传两个步骤融合,即通过工况本身的变化传输信息。以井下设备本身的工况作为信息传输的载体,可以在监测工况之后,通过主动改变对杆体420施加的作用力,使得地面100的抽油设备400的负载发生变化,从而在地面一侧通过监测抽油设备400的功率或者其悬点的载荷就能够获取井下上传的信息。本发明将信息调制于对杆体420作用力的方式,一方面没有采用电磁波或者声波作为信息的载体,能够避免电磁波/声波在井下传输衰减和干扰较大的缺陷;另一方面,本发明的调制解调方案简单,仅需要连通或者阻断泵体10内部与外部,或者改变与杆体420或者泵杆接触时的阻力就能将信息调制于抽油设备400的负载上,地面设备接收信息时仅需要直接读取抽油设备400的负载变化或者抽油设备400悬点载荷变化,就能够根据功率波动或者载荷波动的曲线,解调井下上传的信息,例如可以根据波动曲线的幅度、周期长度、中间停顿的时长等信息获取井下上传的信
息,因此在提高信息传输可靠性、稳定性基础上减少成本。而且,本发明提供的采油装置也利于大规模部署,与现阶段的采油设备兼容程度高,如油田采油应用场景下,基本采用抽油机、抽油杆、泵体等采油设备,而且监测抽油机的功率是该领域的常规手段,因此本发明提供的采油装置可以直接替换抽油泵。此外,本发明相对现阶段的采用的zigbee、蓝牙、射频等无线通信技术,在井下工况下衰减严重,其无法实现远距离传输。而本发明能够实现井下到地面的远距离通信。通信的距离由井下深度决定,并且理论上通信的距离不受限制,在本实施例中至少能够实现距离大于1000m以上的井下与地面通信。
70.优选地,在杆体420仅与泵桶13连接且不延伸进入通信模块20或者第一凡尔11与第二凡尔12之间的情况下,通信模块20可以配置为通过控制泵体10内部与外部是否连通的方式传输信息或数据。优选地,通信模块20可以通过设置阀体24控制泵体10内部与外部的连通与阻断。
71.再次参见图2,第一凡尔11与第二凡尔12之间形成的空间为出油室14。通信模块20套设于泵体10内。优选地,通信模块20设置于第二凡尔11与第二凡尔12之间。通信模块20设置于出油室14内。通信模块20包括壳体。壳体可以大致呈柱体。壳体的径向截面可以是圆形或多边形。优选地,壳体的径向截面可以与泵体10的径向截面相同或者不相同。优选地,壳体固定于泵体10内。壳体固定于出油室14内。壳体可以与泵体10的内壁彼此抵靠。需要说明的是,此处所指的泵体10的内壁可以是油管600内壁,这是由于泵体10设置于油管600内。壳体的至少部分侧壁与泵体10的内壁连接。杆体420与泵桶13连接。具体地,杆体420可以带动泵桶13沿第一方向或第二方向运动。
72.优选地,在杆体420沿第一方向运动的情况下,或者在杆体420上冲程的情况下,泵桶13随杆体420沿第一方向运动。在泵桶13沿第一方向运动的情况下,第一凡尔11关闭。由于第一凡尔11自重以及泵桶13内的压力,因此第一凡尔关闭。在泵桶13沿第一方向运动的情况下,第二凡尔12打开。由于第一凡尔11关闭,使得出油室14的压力降低,导致出油室14的压力小于第二凡尔12沿第二方向一侧的流体的压力,因此第二凡尔12打开。在第二凡尔12打开的情况下,油层300内的流体可以从环空510进入出油室14。环空510为套管500与油管600之间的空间。需要说明的是,通信模块20设置有流体通过的通道,从而出油室14被通信模块20隔开的两个空间是连通的。另外,通信模块20还可以不设置该通道。由于通信模块20整体可以不填满出油室14的横截面,因此通信模块20与出油室14之间存在空隙,出油室14内的流体可以通过该空隙流通。
73.优选地,在杆体420沿第二方向运动的情况下,或者在杆体420下冲程的情况下,泵桶13随杆体420沿第二方向运动。在泵桶13沿第二方向运动的情况下,第二凡尔12关闭,第一凡尔11打开。泵桶13在杆体420的作用下沿第二方向运动,进而压缩出油室14内的流体,进而当出油室14的压力大于第二凡尔12的第二方向一侧压力的情况下,第二凡尔12关闭。即在泵桶13沿第二方向运动的情况下,第二凡尔12关闭。当第二凡尔12关闭后,出油室14的压力继续增大。当出油室14内的压力大于泵桶13的压力的情况下,第一凡尔11打开。在第一凡尔11打开的情况下,出油室14内的流体进入泵桶13内,并使得流体沿油管600排出,将泵桶13内的流体举升至地面100,此时抽油设备400的负载,或者抽油设备400所承受的作用力为杆体420所承受的重力,该重力是泵体10及吸入的流体的自重。
74.优选地,抽油设备400的负载为杆体420所承受的作用力。在泵体10内部与外部阻
断/隔离的情况下,或者在泵体10内部与环空510阻断/隔离的情况下,抽油设备400的负载为泵体10及吸入的流体的自重。抽油设备400所承受的作用力可以是杆体420和泵体10的自重。此处泵体10的自重还包括泵体10内流体的重量。
75.优选地,在泵体10内部与外部连通的情况下,或者泵体10内部与环空510连通的情况下,抽油设备400的负载为泵桶13与泵体10外部的压差,或者抽油设备400的负载为泵桶13与环空510的压差。具体而言,在泵桶13沿第二方向运动的情况下,出油室14的压力不断增大,如果泵体10内部与外部连通,或者泵体10与环空510连通的情况下,或者出油室13与环空510连通的情况下,出油室14内的流体回流到环空510,导致出油室14内的压力减小,进而第一凡尔11无法打开,出油室14内的流体无法进入泵桶13,此时抽油设备400的负载为泵桶13与泵体10外部的压差,或者抽油设备400的负载为泵桶13与环空510的压差。通过该设置方式,达到的有益效果是:
76.在泵体10的内部与外部阻断/隔离的情况下,泵体10的泵桶13在抽油设备400的驱动下沿第一方向和第二方向运动,从而将油层300内的原油举升至地面,此时抽油设备400的负载可以简化为杆体420所承受的重力,具体为泵体10及吸入流体的重力。在泵体10的内部与外部连通的情况下,泵桶13沿第二方向运动,由于出油室14与外部的环空510连通,使得出油室14压力降低无法打开第一凡尔11,导致流体无法流入泵桶13内,此时抽油设备400的负载由泵体10及其内部流体的重力转变为泵桶13与外部环空510的压差,使得杆体420所承受的作用力增加,进而杆体420悬点的载荷变大,而且抽油设备400的所承受的作用力相应增加,导致抽油设备400的举升电机的电流增大,导致抽油设备400的功率增大。地面100的控制模块410可以监测抽油设备400的功率变化和/或抽油设备400与杆体420连接的悬点处的载荷变化,进而控制模块410可以获取井下200的泵体10是否与外部环空510是否连通,因此通信模块20可以通过依照编码指令规律性地连通/阻断泵体10内部和外部,就能够将编码后的信息通过抽油设备400的功率波动/杆体420悬点的载荷变化传递至控制模块410。控制模块410可以对抽油设备400的功率波动/杆体420悬点的载荷变化进行解调和解码从而获取通信模块20上传的信息。优选地,该信息可以是井下设备的工况和井下参数。
77.为了便于理解,进一步对本发明的工作原理进行说明。参见图2,阀体24与第二凡尔12相当于并联在一起,即阀体24可以强制出油室14与外界连通。在正常情况下,即不需要通信的情况下阀体24为常闭状态,使得出油室14与外界不连通。在抽油设备400下冲程时,第二凡尔12关闭,并且阀体24关闭,进而出油室14与外界隔断,因此出油室14的压力增大使得第一凡尔11打开,出油室14内的流体进入泵桶13一侧,此时抽油设备400的负载可以简化为杆体420所承受的重力。如果在抽油设备400下冲程时控制阀体24打开,则出油室14压力增大时,出油室14内的流体会通过阀体24和泄油口15回流到外界,导致第一凡尔11无法打开,此时抽油设备400的负载为泵桶13与外界的压差,导致抽油设备400的负载增加,进而抽油设备400的电机功率增加。
78.作为优选地,再次参见图2,通信模块20通过阀体24使得泵体10的内部与外部连通或阻断。优选地,阀体24设置于泵体10内部与外部的连通处。具体地,通信模块20包括第一管体27。泵体10的侧壁设置有泄油口15。第一管体27与泄油口15连通。阀体24可以设置于泄油口15处。阀体24还可以设置于第一管体27的端部。具体地,第一管体27的一端封闭,另一端设置有阀体24。
79.需要说明的是,由于通信模块20设置于出油室14,因此在通信模块20填满出油室14的情况下需要通信模块20能够通过流体。优选地,通信模块20设置有第二管体28。第二管体28用于通过流体。第二管体28用于连通出油室14被通信模块20分隔的两部分。
80.优选地,通信模块20配置为打开/关闭阀体24以改变抽油设备400的负载的方式传输信息。优选地,驱动阀体24开启或关闭以改变泵体10对杆体420承受的作用力的方式将传输的信息调制于杆体420的悬点载荷波动中或抽油设备400的功率波动中。具体地,参见图3,作为优选地,通信模块20至少包括处理单元21、驱动单元26和电机25。处理单元21与驱动单元26连接。驱动单元26与电机25连接。驱动单元用于驱动电机25。电机25与阀体24连接。处理单元21配置为通过电机25驱动阀体24打开/关闭。优选地,处理单元21配置为基于驱动单元26驱动电机25以控制阀体24的开度。电机25可以是无刷电机。通过该设置方式,阀体24的开度可以进行无极调节,从而控制出油室14与外部环空510的连通与阻断。
81.优选地,处理单元21可以是电路,还可以是微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application
‑
specific integrated circuit,asic)、现场可编程门阵列(field programmable gate array,fpga)、图形处理器(graphics processing unit,gpu)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。
82.优选地,为实现泵体10内部与外部之间的连通或阻断的目的,本领域技术人员还能够预见将阀体24设置于泄油口15处,将阀体24设置于泄油口15与第一管体27的连通处,将阀体24设置于第一管体27端部附近等变形,均能够实现泵体10内部与外部之间的连通或阻断的目的。优选地,本领域技术人员还能够预见到控制流体的流通的零部件替代阀体24,例如可以改变腔体与外界连通的机械装置,比如动阀门、控制阀门、单向阀、电动阀、高压球阀等。优选地,阀体24还可以采用薄膜的阀门。以上零部件均能够实现泵体10内部与外部之间的连通或阻断的目的。
83.优选地,在上述优选的实施方式中,通信模块20固定于泵体10内,通信模块20内的第一管体27与泄油口15连通,其目的一方面是用于提供泵体10外部的环空510与泵体10内部之间连通的通道,另一方面可以在第一管体27的端部设置阀体24来实现泵体10内部与外部之间的连通或阻断,而为实现以上目的,还能够预见到存在通信模块20游离于泵体10内部的变形。例如,通信模块20还能够在泵体10内沿第一方向或第二方向移动,在通信模块20移动的过程中可以遮挡泄油口15。通过该设置方式,可以不通过阀体24实现泵体10内部与外部之间的连通或阻断。
84.优选地,下面举例说明通信模块20通过阀体24通信的具体实施方式。正常情况下,抽油设备400或抽气设备正常举升负载(流体或气体),上下冲程的过程负载呈周期变化,参见图6所示的抽油设备400的功率波形图。通信模块20在传输信息时可以先发送一端起始信号来触发通信状态。例如,通信模块20发送数据为压力12兆帕时,通信模块20首先对发送的信息或数据进行编码。例如,可以采用三段二进制数字进行编码。第一段为起始信号或者头数据。第二段表示将要传输的数据的数据类型。第三段为传输的数据具体内容。例如,起始信号可以用05表示。第二段可以采用02表示数据地址指向压力。第三段为12。即通信模块对05/02/12进行编码,转为二进制0101/0010/1010。通信模块20通过阀体24干预下冲程的功
率波形。通信模块20或者处理单元21发送“1”时为判断杆体420或者泵桶13为下冲程状态时打开阀体24然后关闭,从而使得杆体420的拉力突然增大后恢复正常,对应可以参见图7中下冲程过程中抽油设备400的功率发生的“干扰”。通信模块20或者处理单元21发送“0”时保持阀体24为关闭状态即可。优选地,通信模块20或者处理单元21可以配置为在单独的下冲程时间段内多次打开和关闭阀体24进行多位传输。
85.优选地,参见图3,通信模块20可以设置有内置电池29。内置电池29可以为通信模块20内的电气元件供电。优选地,井下200还可以设置有发电设备。发电设备可以用于给通信模块20供电。发电设备还可以给内置电池29供电。
86.优选地,参见图3,通信模块20还包括传感单元23。传感单元23包括流量传感器、温度传感器、压力传感器、含水率传感器的一种或几种。优选地,传感单元23还可以包括位移传感器。优选地,通信模块20配置为执行如下步骤:
87.基于传感单元23获取监测数据;
88.按照预设的编码方式对监测数据编码;
89.根据编码指令控制阀体24的开度。
90.优选地,监测数据包括井下工况和环境参数。井下工况和环境参数包括温度、压力、振动、流量、含水率等。根据编码指令控制阀体24的开或关能够形成对应抽油设备400的功率变化或者杆体420悬点的载荷变化。
91.优选地,控制模块410用于检测抽油设备400的功率变化和/或杆体420悬点处的载荷变化。
92.优选地,控制模块410与抽油设备400电气连接。控制模块410可以设置于抽油设备400举升电机的控制柜处。控制模块410配置为实时监测抽油设备400的功率变化。控制模块410至少能够对抽油设备400的运动状态进行控制。优选地,控制模块410包括功率检测单元和控制单元。功率检测单元用于实时监测抽油设备400的功率变化和/或杆体420悬点的载荷变化。功率检测单元可以是三相功率检测器件。优选地,还可以通过抽油机负载传感器监测悬点的载荷。控制单元用于对抽油设备400的运动状态进行控制。控制单元可以是控制电路。控制单元还可以是是微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application
‑
specific integrated circuit,asic)、现场可编程门阵列(field programmable gate array,fpga)、图形处理器(graphics processing unit,gpu)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。
93.优选地,抽油设备400的运动状态包括启停、冲次状态和冲程状态。抽油设备400的冲程可以是抽油设备400的光杆运行到上死点和下死点之间的距离。冲程状态包括上冲程和下冲程。上冲程可以表示抽油设备400驱动杆体420沿第一方向运动。下冲程可以表示抽油设备400驱动杆体420沿第二方向运动。冲次可以表示杆体420在单位时间内沿套管500/油管600轴向往复运动的次数。
94.优选地,控制模块410可以对抽油设备400的运动状态进行控制。控制模块410配置为控制抽油设备400的运动状态以改变杆体420的运动状态。杆体420的运动状态包括启停、冲次状态和冲程状态。一方面,冲程状态可以表示杆体420沿第一方向运动或者沿第二方向运动。另一方面,冲程状态还可以表示杆体420沿第一方向由下死点运动到上死点的距离,
或者杆体420沿第二方向由上死点运动到下死点的距离。
95.优选地,控制模块410配置为基于抽油设备400驱动杆体420运动状态变化的方式将传输的信息加载/调制于杆体420的运动状态变化中。或者控制模块410配置为以抽油设备400的运动状态的变化作为信息传输的载体。优选地,通信模块20配置为判断/识别杆体420的运动状态后获取控制模块410传输的信息。通过该设置方式,可以实现控制模块420将信息传输至井下的通信模块200,即数据或指令由地面100传输至井下200。
96.优选地,杆体420或者泵杆能够延伸进入通信模块20内,进而通信模块20可以通过改变杆体420或泵杆运动时阻力的方式传输信息/数据。例如,杆体420或者泵杆能够插入通信模块20内,参见图2。优选地,通信模块20内设置有阻力件。杆体420或者泵杆插入或者穿过该阻力件。阻力件环绕杆体420或者泵杆。阻力件可以在通信模块20/处理单元21的驱动下发生弹性形变进而与杆体420或者泵杆相互抵靠,增加杆体420或者泵杆运动时的阻碍。或者阻力件为分段式,可以通信模块20内的电机或者液压装置的驱动下彼此相对运动,进而可以与杆体420或者泵杆相互抵靠,从而增加杆体420或者泵杆运动时的阻碍。或者阻力件可以是气囊,在其膨胀的情况下可以与杆体420或者泵杆彼此抵靠进而增加摩擦力,从而阻碍杆体420或者泵杆的运动。
97.优选地,通信模块20内供杆体420或者泵杆运动的通道可以设置有喷嘴,喷嘴可以喷射增加阻力或者减小阻力的液体。例如,增加阻力的液体可以是粘稠度较高的油。减小阻力的液体可以是润滑油。优选地,参见图3,通信模块20还包括发电单元22。发电单元22能够改变杆体420或泵杆运动时的阻力。优选地,通信模块20还可以通过发电单元22判断/识别杆体420的运动状态,同时还可以将杆体420的运动转换为电能。具体地,参见图2、图4和图5,杆体420与泵桶13连接。杆体420能够带动泵桶13沿第一方向或第二方向运动。优选地,泵桶13相对杆体420的一侧设置有连接杆。该连接杆可以是泵杆。连接杆延伸进入通信模块20内。参见图2,连接杆进入通信模块20的发电单元22内的部分为丝杠421。参见图5,丝杠421设置有凹槽214。凹槽214按照螺旋环绕丝杠421的方式设置。优选地,丝杠421可以是梯形丝杠,即沿丝杠421轴向的截面,凹槽214为梯形。再次参见图5,发电单元22包括定子207和转子212。转子212套设于定子202内。定子207用于产生旋转磁场。丝杠421套设于转子212内。转子212朝向丝杠421的一侧设置有凸体215。凸体215能够延伸进入凹槽214内。通过该设置方式,在丝杠421沿第一方向/第二方向运动的情况下,能够带动转子212转动。转子212转动能够切割定子207产生的磁场,进而产生电能。具体地,当丝杠421沿第一方向/第二方向运动的情况下,转子212的凸体215能够沿丝杠421螺旋设置的凹槽214滑动/滚动,从而通过凸体215带动转子212绕其轴线转动。优选地,处理单元21或者通信模块20可以通过发电单元22相序判断杆体420的运动方向和频率。通过运动方向可以判断杆体420是否处于上冲程和下冲程。通过频率可以判断杆体420的冲次。优选地,通信模块20或者处理单元21可以通过发电单元22电压判断转子212的转速,进而可以判断杆体420的冲次。此外,如果发电单元22不发电,可以判断杆体420处于停顿状态。需要说明的是,抽油设备400的上冲程、下冲程、冲次和停顿与杆体420的上冲程、下冲程和停顿同步。
98.优选地,通信模块20或者处理单元21可以配置为增加发电机的负载使得发电机的功率变大,从而增加丝杠421运动时的阻力。通过该设置方式,发电单元22可以改变杆体420或者泵杆所承受的阻力,使得抽油设备400的负载增加,进而实现信息的传输。具体地,通信
模块20或者处理单元21通过阻力件或者发电单元22传输信息的方式与通过阀体24传输信息类似,需要传输起始信号、数据类型和数据,区别是抽油设备400负载的变化可以分别作用在抽油设备400的上冲程和下冲程过程中。参见图8,通信模块20或者处理单元21发送“1”时可在下冲程或者上冲程中通过阻力件或者发电单元22增加负载然后恢复至正常的负载,从而使得杆体420的阻力突然增大后恢复正常。同样地,通信模块20或者处理单元21可以配置为在单独的下冲程或上冲程时间段内多次控制阻力件或者发电单元22进行多位传输。
99.优选地,通信模块20的一种优选实施方式的结构,如图4所示。通信模块20包括电路外筒202。通信模块20的内部器件设置于电路外筒202内。通信模块20还包括上接头201。上接头201用于与油管600连接或者与泵体10内壁连接。上接头210的另一端与电路外筒202连接。。上接头201沿第二方向设置有穿线杆203。上接头201沿朝向井底的方向设置有穿线杆203。穿线杆203用于通信模块20内线缆的穿越与密封。穿线杆203的一端与上接头201连接。穿线杆203另一端与电路隔离筒204连接。。通信模块20内相对穿线杆203一侧设置有控制阀组件216。控制阀组件216用于控制流量或截流。控制阀组件216一端与上接头210连接,另一端与电路隔离筒204连接。。穿线杆203朝向井底的一侧设置有电路隔离筒204。电路隔离筒204与电路外筒202密封连接。电路隔离筒204的中空部分能够形成封闭空间。该封闭空间内设置有电路板。电路隔离筒204内的封闭空间,能够隔绝液流,并制成电路板。电路隔离筒204朝向井底的一侧设置有中间接头205。电路隔离筒204与中间接头205密封连接。中间接头205与电路外筒202可拆卸地连接。可拆卸的方式可以是螺纹连接、焊接、铰接、卡合连接等。中间接头205与发电机外壳208可拆卸地连接。中间接头205用于连接发电单元22与流量调节的控制阀组件216以及供线缆穿越。中间接头205朝向井底的一侧设置有电池内筒206。电池内筒206用于放置内置电池29。电池内筒206朝向井底的一侧设置有发电机外壳208。发电机外壳208内设置有发电单元22。发电单元22环绕丝杠421。发电单元22包括定子207和转子212。优选地,电池内筒206一端中间接头205连接,另一端与定子207连接。优选地,电池内筒206可以作为流体的中心通道,隔绝液流,并固定内置电池29。优选地,转子212通过第一轴承外环210和第二轴承外环211与定子207连接。转子212的一端通过第一轴承外环210与定子207铰接,另一端通过第二轴承外环211与定子207铰接。第二轴承外环211相对转子212的一侧与轴承接头213连接。轴承接头213相对第二轴承外环211的一端与下接头209连接。下接头209一端与发电机外壳208连接,另一端与油管600连接。下接头209用于固定发电单元22。
100.根据另一种优选实施方式,丝杠421的外侧设置有螺旋状的突出体,例如螺纹。转子212朝向丝杠421的一侧设置有槽体。丝杠421的突出体能够与转子212的槽体彼此配合。转子212的槽体能够沿丝杠421的突出体滑动/滚动。通过该设置方式,在丝杠421沿第一方向/第二方向运动的情况下,丝杠421能够通过突出体驱动槽体沿突出体滑动/滚动,使得转子212转动。
101.优选地,通信模块20配置为执行如下步骤:
102.按照预设的编码方式对监测数据编码;
103.判断/识别杆体420是否处于传输信息的运动状态;
104.若杆体420不是传输信息的运动状态;
105.基于编码指令控制阀体204打开/关闭。
106.在再次参见图2、图4和图5,丝杠421处可以形成流体的通路。即环空510进入的流体可以通过丝杠421处的缝隙和/或第二管体28流通。
107.实施例2
108.本实施例提供一种无线通信方法,该方法用于将井下数据上传至地面。本实施例所公开的方式可以由实施例1所公开的无线通信采用装置实施,在不发生矛盾的情况下,实施例1的部分/全部实施方式可以作为本实施的补充,重复的内容不再赘述。
109.该方法包括如下步骤:
110.改变杆体420运动时承受的作用力以使得抽油设备400的负载发生变化的方式传输信息或数据。
111.优选地,可以通过控制泵体10内部与外部的连通或阻断改变泵体10对杆体420作用力的方式将信息调制于抽油设备400的负载波动中。优选地,可以通过控制泵体10内部与外部的连通或阻断改变泵体10对杆体420作用力的方式将信息调制于驱动杆体420的抽油设备400的功率变化中。优选地,可以通过与杆体420直接或间接连接的阻力件或者发电单元改变杆体420承受作用力的方式将信息调制于抽油设备400的负载变化中。需要说明的是,本发明涉及信息的传输。本发明中所涉及的信息可以是井下工况和参数。在本发明中信息传输的实体是数据,即数据是运送信息的实体,具体表现为一系列有意义的符号序列。数据传输的方式可以是串行传输,还可以是并行传输。本发明所指的信号是数据的电气/电磁表现,是数据在传输过程中的存在形式。信号可以是模拟信号(连续信号)还可以是数字信号(离散信号)。例如,本发明可以通过传感单元23获取井下工况和参数等信息。井下工况和参数可以模拟信号的方式传输至处理单元21。处理单元21将获取的井下工况和参数进行处理形成数据,并以数字信号的方式传输。
112.优选地,调制是按照要传输的信息来改变一个或几个载体的参量。例如改变杆体420和/或泵体10内柱塞/泵桶13/杆体承受的作用力使得抽油设备400的负载发生变化的方式将信息加载/调制于抽油设备400的负载中。例如按照将要传输的信息改变杆体420和/或泵体10内柱塞/泵桶13/杆体的运动状态。通信模块20可以按照将要传输的信息改变杆体420和/或泵体10内柱塞/泵桶13/杆体承受的作用力或者改变抽油设备400的负载。
113.优选地,可以在泵体10内部与外部的连通处设置阀体24,通过驱动阀体24开启或关闭改变泵体10对杆体420的作用力,从而可以通过监测与杆体420连接的抽油设备400的功率或者监测杆体420悬点处的载荷变化获取井下上传的信息。
114.具体地,地面100设置有抽油设备400和控制模块410。井下20设置有套管500、油管600、杆体420和用于通信的通信模块20。控制模块410用于控制抽油设备400的运动状态。控制模块410还可以监测抽油设备400的功率变化。抽油设备400可以是抽油机,例如游梁式抽油机或者无游梁式抽油机。无梁式抽油机可以是链条式抽油机、钢绳抽油机、液压式抽油机、曲柄连杆式抽油机等。优选地,抽油设备400可以替换为抽气设备。抽气设备可以是游梁式抽气机无或者无游梁式抽气机。优选地,抽油设备400由做功装置驱动,例如举升电机。油管600、泵体10和通信模块20设置于套管500内。杆体420套设于油管600内。油管600与泵体10连接。杆体420与泵体10连接。优选地,杆体420可以是刚性的细长体,例如抽油杆。杆体420还可以是柔性的细长体,例如钢绳或链条。优选地,套管500呈中空状。套管500的一端靠近地面,另一端位于井底。套管500的可以是圆柱体、多边形柱体。油管600呈中空状。油管
600的径向截面可以是圆形或者多边形。作为优选地,泵体10还可以套设于油管600内。油管600远离地面一侧的端部由泵体10封堵。泵体320可以是杆式泵或者管式泵。
115.优选地,抽油设备400用于拉动或推动杆体420沿第一方向或第二方向运动。第一方向为朝向地面100一侧运动。第二方向为朝向井下200的井底一侧运动。优选地,抽油设备400通过杆体420拉动或推动泵体10内的部件沿第一方向或第二方向运动。更为具体地,抽油设备400与杆体420连接。杆体420与泵体10连接。优选地,抽油设备400带动杆体420沿第一方向或第二方向运动。优选地,抽油设备400带动杆体420沿第一方向运动为上冲程运动状态。抽油设备400带动杆体420沿第二方向运动为下冲程运动状态。优选地,抽油设备400停止时,杆体420也随之停止,此时处于停顿的运动状态。
116.优选地,泵体10包括第一凡尔11、第二凡尔12以及泵桶13,参见图2。优选地,泵桶13可以是柱塞。第一凡尔11和第二凡尔12可以是阀体,例如单向阀。又例如第一凡尔11可以是游动阀,第二凡尔12可以是固定阀。泵桶13朝向第二方向一侧设置有第一凡尔11。或者泵桶13的底部设置有第一凡尔11。杆体420与泵桶13连接。泵桶13能够随杆体420沿第一方向或第二方向运动。具体地,如果第一凡尔11/第二凡尔12第一方向一侧的压力小于第一凡尔11/第二凡尔12第二方向一侧的压力,第一凡尔11/第二凡尔12打开,流体可以通过第一凡尔11/第二凡尔12。如果第一凡尔11/第二凡尔12第一方向一侧的压力大于第一凡尔11/第二凡尔12第二方向一侧的压力,第一凡尔11/第二凡尔12关闭,流体无法通过第一凡尔11/第二凡尔。通过该设置方式,泵桶13沿第一方向和第二方向运动能够周期性地打开或关闭第一凡尔和第二凡尔,进而将油层300内的流体举升至地面100。
117.优选地,杆体420一方面可以仅与泵桶13连接,可以不延伸进入通信模块20或者第一凡尔11与第二凡尔12之间。另一方面杆体420可以穿过泵桶13并延伸至第一凡尔11和第二凡尔12之间。或者杆体420可以穿过泵桶13延伸至通信模块20内。优选地,还可以是杆体420与泵桶13的一侧连接。泵桶13相对杆体420的另一侧设置有泵杆。泵杆延伸至第一凡尔11和第二凡尔12之间。泵杆能够在泵桶13的带动下沿第一方向或第二方向运动。
118.优选地,抽油设备400带动泵体10内的泵桶13或者泵杆周期性地沿第一方向或第二方向运动。优选地,抽油设备400带动杆体420沿套管500/油管600的轴线/轴向运动。优选地,抽油设备400带动杆体420周期性地沿第一方向或第二方向运动。抽油设备400带动杆体420周期性地沿套管500/油管600的轴线上下运动。优选地,杆体420在抽油设备400的作用下沿套管500/油管600的轴向/轴线运动。优选地,杆体420在抽油设备400的作用下沿杆体420的轴向/轴线运动。优选地,泵体10内泵桶13或泵杆在杆体420的带动下沿杆体420的轴向/轴线运动。泵体10内泵桶13或泵杆在杆体420的带动下沿套管500/油管600的轴线/轴向运动。泵体10内泵桶13或泵杆在杆体420的带动下沿第一方向或者第二方向运动。泵体10内泵桶13或泵杆在杆体420的带动下周期性地沿第一方向或者第二方向运动。
119.优选地,泵体10用于将油层300内的原油举升至地面。通信模块20用于将井下设备的工况和参数上传至地面100。优选地,通信模块20将井下工况和参数上传至控制模块410。
120.优选地,泵体10以及部分杆体420设置于井下200。泵体10内泵桶13或者泵杆在抽油设备400的驱动下随杆体420沿第一方向或第二方向运动。或者泵体10内泵桶13或者泵杆在抽油设备400的驱动下随杆体420朝向地面100一侧运动或者朝向井底一侧运动。优选地,本发明的泵体10的工作原理可以与管式泵/杆式泵相同。
121.优选地,通信模块20配置为基于控制泵体10内部与外部的连通/阻断以改变泵体10对杆体420作用力的方式将信息/数据调制于抽油设备400负载的变化中。优选地,通信模块20配置为基于控制泵体10内部与外部是否连通以改变杆体420承受作用力的方式传输信息/数据。优选地,通信模块20可以通过阀体24或者自身移动来控制泵体10内部与外部的连通/阻断。具体地,泵体10内泵桶13沿第一方向或第二方向运动的情况下可以将油层300内的流体举升至地面100。当通信模块20配置为关闭泵体10内部与外部的连通时,泵体10作为封闭的整体其对杆体420的作用力为其自重和其包含的流体的重量。当通信模块20配置为打开泵体10内部与外部的连通时,泵体10与外部连通,其对杆体420的作用力转化为泵体10内部与外部的压差,导致对杆体420的作用力增加,进而使得抽油设备400的负载增加。抽油设备400的负载增加导致其连接杆体420悬点处的载荷或者使得抽油设备400的功率增加。
122.优选地,在杆体420或者泵杆进入通信模块20内的情况下,通信模块20配置为增加或减小杆体420或泵杆运动时的阻力的方式传输信息/数据。优选地,在杆体420或者泵杆进入通信模块20内的情况下,通信模块20配置为基于改变杆体420或泵杆运动时阻力使得抽油设备400的负载发生变化的方式将信息/数据调制于抽油设备400负载的个中。具体地,通信模块20内可以设置与杆体420或者泵杆接触的元件,该元件能够阻碍杆体420或者泵杆的往复运动,进而导致抽油设备400的驱动杆体420运动时的正常负载发生波动,因此通过监测抽油设备400的负载波形就能够解析通信模块20发送的信息或数据。
123.优选地,以上通信模块20的配置方式可以是通信模块20内处理单元21的配置方式。
124.通过以上通信模块20或处理单元21传输信息/数据的设置方式,达到的有益效果是:
125.现阶段关于采油井下设备工况和井下参数的监测,通常将工况和参数调制于电磁波\声波作为信息的载体,电磁波/声波通过井下流体、套管500、油管600、杆体420等传输媒介传输至地面。然而,一方面由于井下介质成分较多,地层和油层特性分布复杂,存在不均匀的情况,再加之井下恶劣的高温、高压环境,电磁波/声波在井下传输时衰减和干扰很大,信号传输到地面或者井下时极其微弱,并且大地背景噪声和井下的高频/低频干扰,使得信号的准确提取存在很大的困难,即使采用超低频电磁波进行通信,噪声也很难滤除。而本发明将对工况的监测和信息的上传两个步骤融合,即通过工况本身的变化传输信息。以井下设备本身的工况作为信息传输的载体,可以在监测工况之后,通过主动改变对杆体420施加的作用力,使得地面100的抽油设备400的负载发生变化,从而在地面一侧通过监测抽油设备400的功率或者其悬点的载荷就能够获取井下上传的信息。本发明将信息调制于对杆体420作用力的方式,一方面没有采用电磁波或者声波作为信息的载体,能够避免电磁波/声波在井下传输衰减和干扰较大的缺陷;另一方面,本发明的调制解调方案简单,仅需要连通或者阻断泵体10内部与外部,或者改变与杆体420或者泵杆接触时的阻力就能将信息调制于抽油设备400的负载上,地面设备接收信息时仅需要直接读取抽油设备400的负载变化或者抽油设备400悬点载荷变化,就能够根据功率波动或者载荷波动的曲线,解调井下上传的信息,例如可以根据波动曲线的幅度、周期长度、中间停顿的时长等信息获取井下上传的信息,因此在提高信息传输可靠性、稳定性基础上减少成本。而且,本发明提供的方法也利于大规模部署,与现阶段的采油设备兼容程度高,如油田采油应用场景下,基本采用抽油机、
抽油杆、泵体等采油设备,而且监测抽油机的功率是该领域的常规手段,因此本发明提供的采油方法可以直接替换抽油泵。此外,本发明相对现阶段的采用的zigbee、蓝牙、射频等无线通信技术,在井下工况下衰减严重,其无法实现远距离传输。而本发明能够实现井下到地面的远距离通信。通信的距离由井下深度决定,并且理论上通信的距离不受限制,在本实施例中至少能够实现距离大于1000m以上的井下与地面通信。
126.优选地,在杆体420仅与泵桶13连接且不延伸进入通信模块20或者第一凡尔11与第二凡尔12之间的情况下,通信模块20可以配置为通过控制泵体10内部与外部是否连通的方式传输信息或数据。优选地,通信模块20可以通过设置阀体24控制泵体10内部与外部的连通与阻断。
127.再次参见图2,第一凡尔11与第二凡尔12之间形成的空间为出油室14。通信模块20套设于泵体10内。优选地,通信模块20设置于第二凡尔11与第二凡尔12之间。通信模块20设置于出油室14内。通信模块20包括壳体。壳体可以大致呈柱体。壳体的径向截面可以是圆形或多边形。优选地,壳体的径向截面可以与泵体10的径向截面相同或者不相同。优选地,壳体固定于泵体10内。壳体固定于出油室14内。壳体可以与泵体10的内壁彼此抵靠。需要说明的是,此处所指的泵体10的内壁可以是油管600内壁,这是由于泵体10设置于油管600内。壳体的至少部分侧壁与泵体10的内壁连接。杆体420与泵桶13连接。具体地,杆体420可以带动泵桶13沿第一方向或第二方向运动。
128.优选地,在杆体420沿第一方向运动的情况下,或者在杆体420上冲程的情况下,泵桶13随杆体420沿第一方向运动。在泵桶13沿第一方向运动的情况下,第一凡尔11关闭。由于第一凡尔11自重以及泵桶13内的压力,因此第一凡尔关闭。在泵桶13沿第一方向运动的情况下,第二凡尔12打开。由于第一凡尔11关闭,使得出油室14的压力降低,导致出油室14的压力小于第二凡尔12沿第二方向一侧的流体的压力,因此第二凡尔12打开。在第二凡尔12打开的情况下,油层300内的流体可以从环空510进入出油室14。环空510为套管500与油管600之间的空间。需要说明的是,通信模块20设置有流体通过的通道,从而出油室14被通信模块20隔开的两个空间是连通的。另外,通信模块20还可以不设置该通道。由于通信模块20整体可以不填满出油室14的横截面,因此通信模块20与出油室14之间存在空隙,出油室14内的流体可以通过该空隙流通。
129.优选地,在杆体420沿第二方向运动的情况下,或者在杆体420下冲程的情况下,泵桶13随杆体420沿第二方向运动。在泵桶13沿第二方向运动的情况下,第二凡尔12关闭,第一凡尔11打开。泵桶13在杆体420的作用下沿第二方向运动,进而压缩出油室14内的流体,进而当出油室14的压力大于第二凡尔12的第二方向一侧压力的情况下,第二凡尔12关闭。即在泵桶13沿第二方向运动的情况下,第二凡尔12关闭。当第二凡尔12关闭后,出油室14的压力继续增大。当出油室14内的压力大于泵桶13的压力的情况下,第一凡尔11打开。在第一凡尔11打开的情况下,出油室14内的流体进入泵桶13内,并使得流体沿油管600排出,将泵桶13内的流体举升至地面100,此时抽油设备400的负载,或者抽油设备400所承受的作用力为杆体420所承受的重力,该重力是泵体10及吸入的流体的自重。
130.优选地,抽油设备400的负载为杆体420所承受的作用力。在泵体10内部与外部阻断/隔离的情况下,或者在泵体10内部与环空510阻断/隔离的情况下,抽油设备400的负载为泵体10及吸入的流体的自重。抽油设备400所承受的作用力可以是杆体420和泵体10的自
重。此处泵体10的自重还包括泵体10内流体的重量。
131.优选地,在泵体10内部与外部连通的情况下,或者泵体10内部与环空510连通的情况下,抽油设备400的负载为泵桶13与泵体10外部的压差,或者抽油设备400的负载为泵桶13与环空510的压差。具体而言,在泵桶13沿第二方向运动的情况下,出油室14的压力不断增大,如果泵体10内部与外部连通,或者泵体10与环空510连通的情况下,或者出油室13与环空510连通的情况下,出油室14内的流体回流到环空510,导致出油室14内的压力减小,进而第一凡尔11无法打开,出油室14内的流体无法进入泵桶13,此时抽油设备400的负载为泵桶13与泵体10外部的压差,或者抽油设备400的负载为泵桶13与环空510的压差。通过该设置方式,达到的有益效果是:
132.在泵体10的内部与外部阻断/隔离的情况下,泵体10的泵桶13在抽油设备400的驱动下沿第一方向和第二方向运动,从而将油层300内的原油举升至地面,此时抽油设备400的负载可以简化为杆体420所承受的重力,具体为泵体10及吸入流体的重力。在泵体10的内部与外部连通的情况下,泵桶13沿第二方向运动,由于出油室14与外部的环空510连通,使得出油室14压力降低无法打开第一凡尔11,导致流体无法流入泵桶13内,此时抽油设备400的负载由泵体10及其内部流体的重力转变为泵桶13与外部环空510的压差,使得杆体420所承受的作用力增加,进而杆体420悬点的载荷变大,而且抽油设备400的所承受的作用力相应增加,导致抽油设备400的举升电机的电流增大,导致抽油设备400的功率增大。地面100的控制模块410可以监测抽油设备400的功率变化和/或抽油设备400与杆体420连接的悬点处的载荷变化,进而控制模块410可以获取井下200的泵体10是否与外部环空510是否连通,因此通信模块20可以通过依照编码指令规律性地连通/阻断泵体10内部和外部,就能够将编码后的信息通过抽油设备400的功率波动/杆体420悬点的载荷变化传递至控制模块410。控制模块410可以对抽油设备400的功率波动/杆体420悬点的载荷变化进行解调和解码从而获取通信模块20上传的信息。优选地,该信息可以是井下设备的工况和井下参数。
133.为了便于理解,进一步对本发明的工作原理进行说明。参见图2,阀体24与第二凡尔12相当于并联在一起,即阀体24可以强制出油室14与外界连通。在正常情况下,即不需要通信的情况下阀体24为常闭状态,使得出油室14与外界不连通。在抽油设备400下冲程时,第二凡尔12关闭,并且阀体24关闭,进而出油室14与外界隔断,因此出油室14的压力增大使得第一凡尔11打开,出油室14内的流体进入泵桶13一侧,此时抽油设备400的负载可以简化为杆体420所承受的重力。如果在抽油设备400下冲程时控制阀体24打开,则出油室14压力增大时,出油室14内的流体会通过阀体24和泄油口15回流到外界,导致第一凡尔11无法打开,此时抽油设备400的负载为泵桶13与外界的压差,导致抽油设备400的负载增加,进而抽油设备400的电机功率增加。
134.作为优选地,再次参见图2,通信模块20通过阀体24使得泵体10的内部与外部连通或阻断。优选地,阀体24设置于泵体10内部与外部的连通处。具体地,通信模块20包括第一管体27。泵体10的侧壁设置有泄油口15。第一管体27与泄油口15连通。阀体24可以设置于泄油口15处。阀体24还可以设置于第一管体27的端部。具体地,第一管体27的一端封闭,另一端设置有阀体24。
135.需要说明的是,由于通信模块20设置于出油室14,因此在通信模块20填满出油室14的情况下需要通信模块20能够通过流体。优选地,通信模块20设置有第二管体28。第二管
体28用于通过流体。第二管体28用于连通出油室14被通信模块20分隔的两部分。
136.优选地,通信模块20配置为打开/关闭阀体24以改变抽油设备400的负载的方式传输信息。优选地,驱动阀体24开启或关闭以改变泵体10对杆体420承受的作用力的方式将传输的信息调制于杆体420的悬点载荷波动中或抽油设备400的功率波动中。具体地,参见图3,作为优选地,通信模块20至少包括处理单元21、驱动单元26和电机25。处理单元21与驱动单元26连接。驱动单元26与电机25连接。驱动单元用于驱动电机25。电机25与阀体24连接。处理单元21配置为通过电机25驱动阀体24打开/关闭。优选地,处理单元21配置为基于驱动单元26驱动电机25以控制阀体24的开度。电机25可以是无刷电机。通过该设置方式,阀体24的开度可以进行无极调节,从而控制出油室14与外部环空510的连通与阻断。
137.优选地,处理单元21可以是电路,还可以是微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application
‑
specific integrated circuit,asic)、现场可编程门阵列(field programmable gate array,fpga)、图形处理器(graphics processing unit,gpu)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。
138.优选地,为实现泵体10内部与外部之间的连通或阻断的目的,本领域技术人员还能够预见将阀体24设置于泄油口15处,将阀体24设置于泄油口15与第一管体27的连通处,将阀体24设置于第一管体27端部附近等变形,均能够实现泵体10内部与外部之间的连通或阻断的目的。优选地,本领域技术人员还能够预见到控制流体的流通的零部件替代阀体24,例如可以改变腔体与外界连通的机械装置,比如动阀门、控制阀门、单向阀、电动阀、高压球阀等。优选地,阀体24还可以采用薄膜的阀门。以上零部件均能够实现泵体10内部与外部之间的连通或阻断的目的。
139.优选地,在上述优选的实施方式中,通信模块20固定于泵体10内,通信模块20内的第一管体27与泄油口15连通,其目的一方面是用于提供泵体10外部的环空510与泵体10内部之间连通的通道,另一方面可以在第一管体27的端部设置阀体24来实现泵体10内部与外部之间的连通或阻断,而为实现以上目的,还能够预见到存在通信模块20游离于泵体10内部的变形。例如,通信模块20还能够在泵体10内沿第一方向或第二方向移动,在通信模块20移动的过程中可以遮挡泄油口15。通过该设置方式,可以不通过阀体24实现泵体10内部与外部之间的连通或阻断。
140.优选地,下面举例说明通信模块20通过阀体24通信的具体实施方式。正常情况下,抽油设备400或抽气设备正常举升负载(流体或气体),上下冲程的过程负载呈周期变化,参见图6所示的抽油设备400的功率波形图。通信模块20在传输信息时可以先发送一端起始信号来触发通信状态。例如,通信模块20发送数据为压力12兆帕时,通信模块20首先对发送的信息或数据进行编码。例如,可以采用三段二进制数字进行编码。第一段为起始信号或者头数据。第二段表示将要传输的数据的数据类型。第三段为传输的数据具体内容。例如,起始信号可以用05表示。第二段可以采用02表示数据地址指向压力。第三段为12。即通信模块对05/02/12进行编码,转为二进制0101/0010/1010。通信模块20通过阀体24干预下冲程的功率波形。通信模块20或者处理单元21发送“1”时为判断杆体420或者泵桶13为下冲程状态时打开阀体24然后关闭,从而使得杆体420的拉力突然增大后恢复正常,对应可以参见图7中
下冲程过程中抽油设备400的功率发生的“干扰”。通信模块20或者处理单元21发送“0”时保持阀体24为关闭状态即可。优选地,通信模块20或者处理单元21可以配置为在单独的下冲程时间段内多次打开和关闭阀体24进行多位传输。
141.优选地,参见图3,通信模块20可以设置有内置电池29。内置电池29可以为通信模块20内的电气元件供电。优选地,井下200还可以设置有发电设备。发电设备可以用于给通信模块20供电。发电设备还可以给内置电池29供电。
142.优选地,参见图3,通信模块20还包括传感单元23。传感单元23包括流量传感器、温度传感器、压力传感器、含水率传感器的一种或几种。优选地,传感单元23还可以包括位移传感器。优选地,通信模块20配置为执行如下步骤:
143.基于传感单元23获取监测数据;
144.按照预设的编码方式对监测数据编码;
145.根据编码指令控制阀体24的开度。
146.优选地,监测数据包括井下工况和环境参数。井下工况和环境参数包括温度、压力、振动、流量、含水率等。根据编码指令控制阀体24的开或关能够形成对应抽油设备400的功率变化或者杆体420悬点的载荷变化。
147.优选地,控制模块410用于检测抽油设备400的功率变化和/或杆体420悬点处的载荷变化。
148.优选地,控制模块410与抽油设备400电气连接。控制模块410可以设置于抽油设备400举升电机的控制柜处。控制模块410配置为实时监测抽油设备400的功率变化。控制模块410至少能够对抽油设备400的运动状态进行控制。优选地,控制模块410包括功率检测单元和控制单元。功率检测单元用于实时监测抽油设备400的功率变化和/或杆体420悬点的载荷变化。功率检测单元可以是三相功率检测器件。优选地,还可以通过抽油机负载传感器监测悬点的载荷。控制单元用于对抽油设备400的运动状态进行控制。控制单元可以是控制电路。控制单元还可以是是微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application
‑
specific integrated circuit,asic)、现场可编程门阵列(field programmable gate array,fpga)、图形处理器(graphics processing unit,gpu)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。
149.优选地,抽油设备400的运动状态包括启停、冲次状态和冲程状态。抽油设备400的冲程可以是抽油设备400的光杆运行到上死点和下死点之间的距离。冲程状态包括上冲程和下冲程。上冲程可以表示抽油设备400驱动杆体420沿第一方向运动。下冲程可以表示抽油设备400驱动杆体420沿第二方向运动。冲次可以表示杆体420在单位时间内沿套管500/油管600轴向往复运动的次数。
150.优选地,控制模块410可以对抽油设备400的运动状态进行控制。控制模块410配置为控制抽油设备400的运动状态以改变杆体420的运动状态。杆体420的运动状态包括启停、冲次状态和冲程状态。一方面,冲程状态可以表示杆体420沿第一方向运动或者沿第二方向运动。另一方面,冲程状态还可以表示杆体420沿第一方向由下死点运动到上死点的距离,或者杆体420沿第二方向由上死点运动到下死点的距离。
151.优选地,控制模块410配置为基于抽油设备400驱动杆体420运动状态变化的方式
将传输的信息加载/调制于杆体420的运动状态变化中。或者控制模块410配置为以抽油设备400的运动状态的变化作为信息传输的载体。优选地,通信模块20配置为判断/识别杆体420的运动状态后获取控制模块410传输的信息。通过该设置方式,可以实现控制模块420将信息传输至井下的通信模块200,即数据或指令由地面100传输至井下200。
152.优选地,杆体420或者泵杆能够延伸进入通信模块20内,进而通信模块20可以通过改变杆体420或泵杆运动时阻力的方式传输信息/数据。例如,杆体420或者泵杆能够插入通信模块20内,参见图2。优选地,通信模块20内设置有阻力件。杆体420或者泵杆插入或者穿过该阻力件。阻力件环绕杆体420或者泵杆。阻力件可以在通信模块20/处理单元21的驱动下发生弹性形变进而与杆体420或者泵杆相互抵靠,增加杆体420或者泵杆运动时的阻碍。或者阻力件为分段式,可以通信模块20内的电机或者液压装置的驱动下彼此相对运动,进而可以与杆体420或者泵杆相互抵靠,从而增加杆体420或者泵杆运动时的阻碍。或者阻力件可以是气囊,在其膨胀的情况下可以与杆体420或者泵杆彼此抵靠进而增加摩擦力,从而阻碍杆体420或者泵杆的运动。
153.优选地,通信模块20内供杆体420或者泵杆运动的通道可以设置有喷嘴,喷嘴可以喷射增加阻力或者减小阻力的液体。例如,增加阻力的液体可以是粘稠度较高的油。减小阻力的液体可以是润滑油。优选地,参见图3,通信模块20还包括发电单元22。发电单元22能够改变杆体420或泵杆运动时的阻力。优选地,通信模块20还可以通过发电单元22判断/识别杆体420的运动状态,同时还可以将杆体420的运动转换为电能。具体地,参见图2、图4和图5,杆体420与泵桶13连接。杆体420能够带动泵桶13沿第一方向或第二方向运动。优选地,泵桶13相对杆体420的一侧设置有连接杆。该连接杆可以是泵杆。连接杆延伸进入通信模块20内。参见图2,连接杆进入通信模块20的发电单元22内的部分为丝杠421。参见图5,丝杠421设置有凹槽214。凹槽214按照螺旋环绕丝杠421的方式设置。优选地,丝杠421可以是梯形丝杠,即沿丝杠421轴向的截面,凹槽214为梯形。再次参见图5,发电单元22包括定子207和转子212。转子212套设于定子202内。定子207用于产生旋转磁场。丝杠421套设于转子212内。转子212朝向丝杠421的一侧设置有凸体215。凸体215能够延伸进入凹槽214内。通过该设置方式,在丝杠421沿第一方向/第二方向运动的情况下,能够带动转子212转动。转子212转动能够切割定子207产生的磁场,进而产生电能。具体地,当丝杠421沿第一方向/第二方向运动的情况下,转子212的凸体215能够沿丝杠421螺旋设置的凹槽214滑动/滚动,从而通过凸体215带动转子212绕其轴线转动。
154.优选地,通信模块20或者处理单元21可以配置为增加发电机的负载使得发电机的功率变大,从而增加丝杠421运动时的阻力。通过该设置方式,发电单元22可以改变杆体420或者泵杆所承受的阻力,使得抽油设备400的负载增加,进而实现信息的传输。具体地,通信模块20或者处理单元21通过阻力件或者发电单元22传输信息的方式与通过阀体24传输信息类似,需要传输起始信号、数据类型和数据,区别是抽油设备400负载的变化可以分别作用在抽油设备400的上冲程和下冲程过程中。参见图8,通信模块20或者处理单元21发送“1”时可在下冲程或者上冲程中通过阻力件或者发电单元22增加负载然后恢复至正常的负载,从而使得杆体420的阻力突然增大后恢复正常。同样地,通信模块20或者处理单元21可以配置为在单独的下冲程或上冲程时间段内多次控制阻力件或者发电单元22进行多位传输。
155.优选地,通信模块20的一种优选实施方式的结构,如图4所示。通信模块20包括电
路外筒202。通信模块20的内部器件设置于电路外筒202内。通信模块20还包括上接头201。上接头201用于与油管600连接或者与泵体10内壁连接。上接头210的另一端与电路外筒202连接。。上接头201沿第二方向设置有穿线杆203。上接头201沿朝向井底的方向设置有穿线杆203。穿线杆203用于通信模块20内线缆的穿越与密封。穿线杆203的一端与上接头201连接。穿线杆203另一端与电路隔离筒204连接。。通信模块20内相对穿线杆203一侧设置有控制阀组件216。控制阀组件216用于控制流量或截流。控制阀组件216一端与上接头210连接,另一端与电路隔离筒204连接。。穿线杆203朝向井底的一侧设置有电路隔离筒204。电路隔离筒204与电路外筒202密封连接。电路隔离筒204的中空部分能够形成封闭空间。该封闭空间内设置有电路板。电路隔离筒204内的封闭空间,能够隔绝液流,并制成电路板。电路隔离筒204朝向井底的一侧设置有中间接头205。电路隔离筒204与中间接头205密封连接。中间接头205与电路外筒202可拆卸地连接。可拆卸的方式可以是螺纹连接、焊接、铰接、卡合连接等。中间接头205与发电机外壳208可拆卸地连接。中间接头205用于连接发电单元22与流量调节的控制阀组件216以及供线缆穿越。中间接头205朝向井底的一侧设置有电池内筒206。电池内筒206用于放置内置电池29。电池内筒206朝向井底的一侧设置有发电机外壳208。发电机外壳208内设置有发电单元22。发电单元22环绕丝杠421。发电单元22包括定子207和转子212。优选地,电池内筒206一端中间接头205连接,另一端与定子207连接。优选地,电池内筒206可以作为流体的中心通道,隔绝液流,并固定内置电池29。优选地,转子212通过第一轴承外环210和第二轴承外环211与定子207连接。转子212的一端通过第一轴承外环210与定子207铰接,另一端通过第二轴承外环211与定子207铰接。第二轴承外环211相对转子212的一侧与轴承接头213连接。轴承接头213相对第二轴承外环211的一端与下接头209连接。下接头209一端与发电机外壳208连接,另一端与油管600连接。下接头209用于固定发电单元22。
156.根据另一种优选实施方式,丝杠421的外侧设置有螺旋状的突出体,例如螺纹。转子212朝向丝杠421的一侧设置有槽体。丝杠421的突出体能够与转子212的槽体彼此配合。转子212的槽体能够沿丝杠421的突出体滑动/滚动。通过该设置方式,在丝杠421沿第一方向/第二方向运动的情况下,丝杠421能够通过突出体驱动槽体沿突出体滑动/滚动,使得转子212转动。
157.优选地,通信模块20配置为执行如下步骤:
158.按照预设的编码方式对监测数据编码;
159.判断/识别杆体420是否处于传输信息的运动状态;
160.若杆体420不是传输信息的运动状态;
161.基于编码指令控制阀体204打开/关闭。
162.在再次参见图2、图4和图5,丝杠421处可以形成流体的通路。即环空510进入的流体可以通过丝杠421处的缝隙和/或第二管体28流通。
163.本发明说明书包含多项发明构思,申请人保留根据每项发明构思提出分案申请的权利。本发明说明书包含多项发明构思,诸如“优选地”、“根据一个优选实施方式”或“可选地”均表示相应段落公开了一个独立的构思,申请人保留根据每项发明构思提出分案申请的权利。
164.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开
内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1