井下测量数据的时空转换方法及装置与流程
1.本发明涉及石油天然气勘探技术领域,尤其涉及一种井下测量数据的时空转换方法及装置。
背景技术:
2.钻井微芯片示踪器由传感器、存储器和封装外壳组成。在实验或现场使用时,首先需将钻井微芯片示踪器进行激活,然后与钻井液从钻杆内一起注入。经过钻头水眼后,随井筒钻井液经环空返回至地面,最后在地面通过特殊装置得以回收。当钻井微芯片示踪器沿井筒环空上返时,内置传感器将记录沿程温度和压力,并将数据存储在存储器中。将返回地面的示踪器回收后,读取存储在存储器中的井筒温度和压力数据,现场钻井工程师就可以对测量的温压数据进行深入解析,并分析可能存在的井下复杂,为钻井现场及时调整钻井参数,预防井下复杂提供重要数据支撑。
3.由于钻井微芯片示踪器是以时间序列记录井筒温度、压力数据,但在现场应用中,温度压力与井深的变化关系才是对钻井工况进行评价的最直接参数,因此需要将钻井微芯片示踪器测量得到的温压数据进行空间维度的转换,将“时间-温度/压力”变化关系转换为“井深-温度/压力”变化关系。目前,钻井微型芯片深度定位常用的方法有估算法、分段速度计算法和磁定位法,但是,估算法、分段速度计算法由于默认失踪器的密度与流体密度相同,因此计算精度较低,磁定位法需要在钻杆接头或特定位置加装磁条,且在示踪器设计上也需配置额外部件,在工程应用中较为繁琐。
技术实现要素:
4.本发明实施例提出一种井下测量数据的时空转换方法,用以对时间序列下的井筒测量数据进行时空转换,该方法包括:
5.根据井身结构和管柱尺寸,将井筒环空分为多个井段;
6.求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;
7.根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置;
8.根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。
9.本发明实施例提出一种井下测量数据的时空转换装置,用以时间序列下的井筒测量数据进行时空转换,该装置包括:
10.井筒分段模块,用于根据井身结构和管柱尺寸,将井筒环空分为多个井段;
11.运移速度计算模块,用于求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;
12.运移距离计算模块,用于根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离钻井微型芯片示踪器在环空中不同时刻的深度位置;
13.时空转换模块,用于根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。
14.本发明实施例还提出了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述井下测量数据的时空转换方法。
15.本发明实施例还提出了一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述井下测量数据的时空转换方法的计算机程序。
16.在本发明实施例中,根据井身结构和管柱尺寸,将井筒环空分为多个井段;
17.求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置;根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。在上述过程中,通过求解钻井微型芯片运动方程,获得运移速度,进而获得运动距离、深度位置,能够对时间序列下的井下测量数据进行时空转换,从而为现场钻井工程师分析可能存在的井下复杂,对钻井现场及时调整钻井参数,预防井下复杂提供重要数据支撑,对于保证施工安全、提高作业效率和降低生产成本有至关重要的作用。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
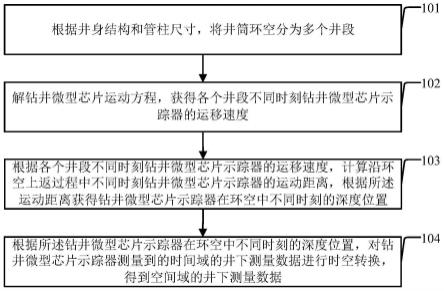
19.图1为本发明实施例中井下测量数据的时空转换方法的流程图;
20.图2为本发明实施例中运移速度计算的流程图;
21.图3为本发明实施例中泥浆泵输出排量示意图;
22.图4为本发明实施例中得到的钻井微型芯片示踪器的运移速度的波形图;
23.图5为本发明实施例中井下测量数据的时空转换装置的示意图;
24.图6为本发明实施例中计算机设备的示意图。
具体实施方式
25.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
26.在本说明书的描述中,所使用的“包含”、“包括”、“具有”、“含有”等,均为开放性的
用语,即意指包含但不限于。参考术语“一个实施例”、“一个具体实施例”、“一些实施例”、“例如”等的描述意指结合该实施例或示例描述的具体特征、结构或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。各实施例中涉及的步骤顺序用于示意性说明本技术的实施,其中的步骤顺序不作限定,可根据需要作适当调整。
27.图1为本发明实施例中井下测量数据的时空转换方法的流程图,如图1所示,该方法包括:
28.步骤101,根据井身结构和管柱尺寸,将井筒环空分为多个井段;
29.步骤102,求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;
30.步骤103,根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置;
31.步骤104,根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。
32.具体实施时,测量数据可包括温压数据,例如,“井深-温度/压力”变化关系,当然,还可以其他在井下测量的数据,相关变化例均已落入本发明的保护范围。
33.在步骤101中,由于不同井段,环空流体的上返速度不同,因此需要根据井身结构和管柱尺寸将井筒环空分为若干井段。设全井眼总长度为h,即h=h1+h2+......+hn;设每个井段环空内外径、长度自上而下分别为d1、d1、h1;d2、d2、h2;
……
,dn、dn、hn,n=1,2,3,
……
。
34.图2为本发明实施例中运移速度计算的流程图,在一实施例中,求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度,包括:
35.步骤201,计算得到各个井段的钻井液流动速度;
36.步骤202,根据各个井段的钻井液流动速度,求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度。
37.图3为本发明实施例中泥浆泵输出排量示意图,可见,泥浆泵输出排量是随时间变化的,因此钻井液排量q是时间t的函数。在一实施例中,采用如下公式,计算得到各个井段的钻井液流动速度:
[0038][0039]
其中,ν
mn
为井段n的钻井液流动速度;q(t)为泥浆泵流量;an为井段n的钻井液流动横截面积。
[0040]
在上述实施例中,钻井液流动横截面积需要对按照钻杆内外径和井眼直径进行计算,即
[0041]
在一实施例中,钻井微型芯片运动方程表示如下:
[0042][0043]
其中,ρ为钻井微型芯片示踪器的密度,g/cm3;g为重力加速度,m/s2;d为钻井微型芯片示踪器的直径,cm;ρ
l
为钻井液的密度,g/cm3;ν
mn
为井段n的钻井液流动速度;p为压力;νn为井段n的运移速度;cd为拖拽力系数。
[0044]
在上述实施例中,为重力,是常值;为浮力,是常值;为拖拽力,与不同井段的钻井液流动速度有关;为压力梯度力,是常值。
[0045]
在一实施例中,采用如下公式,根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离:
[0046][0047]
其中,t0、t1、t2、t
n-2
、t
n-1
、ti为钻井微型芯片示踪器进入环空的时刻、钻井微型芯片示踪器离开第一井段的时刻、钻井微型芯片示踪器离开第二井段的时刻、钻井微型芯片示踪器离开第n-2个井段的时刻、钻井微型芯片示踪器离开第n-1个井段的时刻、钻井微型芯片示踪器离开第n个井段后面的时刻ti;ν1、ν2、ν
n-1
、νn分别为钻井微型芯片示踪器在第一个井段、第二个井段、第n-1个井段、第n个井段的运移速度;hi为时刻ti对应的运动距离。
[0048]
采用如下公式,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置:
[0049]hi
=h-hi(4)
[0050]
其中,h为总井深,hi为时刻ti对应的深度位置。
[0051]
通过上述分段积分的方式,可获得钻井微型芯片示踪器沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离;最后,可根据所述钻井微型芯片示踪器在不同时刻的运动距离,对钻井微型芯片示踪器测量到的时间域下的井下测量数据(例如温压数据)进行时空转换,得到空间域的井下测量数据。现场钻井工程师就可以对测量的温压数据进行深入解析,并分析可能存在的井下复杂,对钻井现场及时调整钻井参数,预防井下复杂提供重要数据支撑,对于保证施工安全、提高作业效率和降低生产成本至关重要。
[0052]
下面给出一个具体实施例,来说明本发明提出方法的具体应用。
[0053]
设x井的井深为h=3600.79m,钻井微芯片示踪器直径d=1cm,钻井微型芯片示踪器的密度为ρ=1.80g/cm3,钻井液的密度为ρ
l
=1.40g/cm3。
[0054]
确定钻井微型芯片示踪器到达环空的时间,即钻井微型芯片示踪器测得压力最大值对应的时间,记为t0=0,示踪器在井内某点运行的时刻为ti,
[0055]
分配井段按照环空内外径的不同,将全井分段计算钻井液流动截面积。每个井段环空内外径、长度自上而下分别为d1=127.00mm、d1=273.25mm、h1=1046.14m;d2=127.00m、d2=177.8mm、h2=2155.12m;d3=177.80mm、d3=215.9mm、h3=399.53mm。
[0056]
在第一个井段[0,1046.14),钻井液流动速度为:
[0057][0058]
在第二个井段[1046.14,3201.26),钻井液流动速度为:
[0059][0060]
在第三个井段[3201.26,3600.79),钻井液流动速度为:
[0061][0062]
计算不同井段钻井微型芯片示踪器受到的重力、拖拽力、浮力和压力梯度力等:
[0063]
重力:
[0064][0065]
浮力:
[0066][0067]
拖拽力:
[0068][0069]
压力梯度力:
[0070][0071]
求解微型芯片运动方程(2),得到各个井段不同时刻钻井微型芯片示踪器的运移速度,图4为本发明实施例中得到的钻井微型芯片示踪器的运移速度的波形图,然后根据公式(3)得到钻井微型芯片示踪器在ti时刻的运动距离hi,即ti时刻对应的井深为3600.79-hi。
[0072]
综上所述,在本发明实施例提出的方法中,根据井身结构和管柱尺寸,将井筒环空分为多个井段;
[0073]
求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置;根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。在上述过程中,通过求解钻井微型芯片运动方程,获得运移速度,进而获得运动距离、深度位置,能够对时间序列下的井下测量数据进行时空转换,从而为现场钻井工程师分析可能存在的井下复杂,对钻井现场及时调整钻井参数,预防井下复杂提供重要数据支撑。
[0074]
依据上述计算流程,本发明实施例还提出一种井下测量数据的时空转换装置,其
原理与井下测量数据的时空转换方法相同,这里不再赘述。
[0075]
图5为本发明实施例中井下测量数据的时空转换计算程序的计算流程示意图,如图5所示,包括:
[0076]
井筒分段模块501,用于根据井身结构和管柱尺寸,将井筒环空分为多个井段;
[0077]
运移速度计算模块502,用于求解钻井微型芯片运动方程,获得各个井段不同时刻钻井微型芯片示踪器的运移速度;
[0078]
运移距离计算模块503,用于根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离,根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置;
[0079]
时空转换模块504,用于根据所述钻井微型芯片示踪器在环空中不同时刻的深度位置,对钻井微型芯片示踪器测量到的时间域的井下测量数据进行时空转换,得到空间域的井下测量数据。
[0080]
在一实施例中,运移速度计算模块具体用于:
[0081]
计算得到各个井段的钻井液流动速度;
[0082]
根据各个井段的钻井液流动速度,求解钻井微型芯片运动方程,获得不同时刻钻井微型芯片示踪器的运移速度。
[0083]
在一实施例中,运移速度计算模块具体用于:
[0084]
采用公式(1),计算得到各个井段的钻井液流动速度。
[0085]
在一实施例中,钻井微型芯片运动方程表示如公式(2)所示。
[0086]
在一实施例中,运移距离计算模块具体用于:
[0087]
采用公式(3),根据各个井段不同时刻钻井微型芯片示踪器的运移速度,计算沿环空上返过程中不同时刻钻井微型芯片示踪器的运动距离;
[0088]
采用公式(4),根据所述运动距离获得钻井微型芯片示踪器在环空中不同时刻的深度位置。
[0089]
本技术的实施例还提供一种计算机设备,图6为本发明实施例中计算机设备的示意图,该计算机设备能够实现上述实施例中的井下测量数据的时空转换方法中全部步骤,所述计算机设备具体包括如下内容:
[0090]
处理器(processor)601、存储器(memory)602、通信接口(communications interface)603和通信总线604;
[0091]
其中,所述处理器601、存储器602、通信接口603通过所述通信总线604完成相互间的通信;所述通信接口603用于实现服务器端设备、检测设备以及用户端设备等相关设备之间的信息传输;
[0092]
所述处理器601用于调用所述存储器602中的计算机程序,所述处理器执行所述计算机程序时实现上述实施例中的井下测量数据的时空转换方法中的全部步骤。
[0093]
本技术的实施例还提供一种计算机可读存储介质,能够实现上述实施例中的井下测量数据的时空转换方法中全部步骤,所述计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现上述实施例中的井下测量数据的时空转换方法的全部步骤。
[0094]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序
产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0095]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0096]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0097]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0098]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1