一种自动钻机机械手精确定位装置及定位方法与流程
1.本发明属于机械设计领域,具体涉及一种自动钻机机械手精确定位装置及定位方法。
背景技术:
2.随着煤矿钻探技术的发展以及工人安全意识的提升,越来越多的自动钻进设备被应用到煤矿井下进行自动钻进作业。自动钻机作为一种自动化程度较高的地质勘探设备,具有钻进速度快、工作稳定性强等优点。然而,现有的自动钻机抓取钻杆后,其机械手需旋转一定角度才能完成钻杆输送,但此过程中存在钻机机械手定位精度不足的问题,导致夹持器无法正确夹紧钻杆,从而影响钻进工作及进程。
技术实现要素:
3.有鉴于此,本发明的目的在于提供一种结构设计合理、实用性强的自动钻机机械手精确定位装置及定位方法,以解决钻机机械手定位精度不理想的问题。
4.为达到上述目的,本发明提供了如下技术方案:
5.本发明提供一种包括安装支架,安装支架上设置压板、弹簧和接近开关,压板的一端铰接于安装支架上,且安装支架在距铰接点所定距离通过弹簧作用在压板上,压板上设置与接近开关相适配的感应板。
6.进一步,压板在远离铰接点的上表面设置调节螺栓。
7.进一步,安装支架呈类c型结构,由套装设置的下l型体与上倒l型体组成。
8.进一步,接近开关采用光电开关。
9.本发明基于上述的自动钻机机械手精确定位装置的定位方法,包括:利用弹簧支撑压板向上倾斜所定角度,并使接近开关感应不到感应板;再机械手施压于压板上后,使弹簧受压且压板由倾斜状转水平状过程中,由接近开关感应到感应板后,停止机械手动作,完成机械手精确定位。
10.本发明的有益效果是:本自动钻机机械手精确定位装置结构设计合理,实用性强,装配简单,定位精度高,有效的提高了机械手定位精度,且维修简便。
11.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
12.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
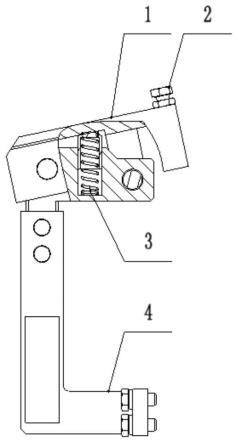
13.图1为本发明的精确定位组件状态一的正面示意图;
14.图2为图1的侧面示意图;
15.图3为本发明的精确定位组件状态二的正面示意图;
16.图4为图3的侧面示意图;
17.图5为本发明的精确定位组件的应用示意图;
18.附图标记说明:保护罩1,压紧螺栓2,弹簧3,安装支架4,接近开关5,感应板6;精确定位组件10,钻杆20,夹持器30,机械手40。
具体实施方式
19.下面结合具体实施方式对本发明作进一步的说明。其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
20.如图1-5所示,本实施例中提及的自动钻机机械手精确定位装置包括安装支架4,安装支架4上设置压板1、弹簧3和接近开关5,压板1的一端铰接于安装支架4上,且安装支架4在距铰接点所定距离通过弹簧3作用在压板1上,压板1上设置与接近开关5相适配的感应板6。在弹簧未受压下处于自然状态时的本精确定位组件10的状态一(如图1、2)为初态,当压板受压而转动,即弹簧受压之后,形成精确定位组件的状态二(如图3、4)。该接近开关5采用光电开关,具有感应快且感应精度高的点。采用上述方案,本利用压板、弹簧、接近开关和感应板组成的精确定位组件10,能够解决机械手定位精度不理想的问题,从而达到机械手精确定位的目的。
21.在另一实施例中的压板1在远离铰接点的上表面设置调节螺栓2,通过调节螺栓可调节压板的受压高度,从而调整接近开关对感应板的感觉方位。
22.在另一实施例中的安装支架4采用呈类c型结构,由套装设置的下l型体与上倒l型体组成。通过类c型结构可便于安装使用,而套装式结构,则可实现安装支架的高度调节,从而适应于机械手的转动。
23.下面具体阐述一下本自动钻机机械手精确定位装置的定位过程:当精确定位组件10处于状态一时,由于弹簧3的弹力作用,压板向上一定角度,感应板安装在压板一侧,此时,感应板也向上倾斜一定角度,接近开关5感应不到感应板,不输出电信号;在当机械手40抓取钻杆20向下摆动时,机械臂压在精确定位组件10上,此时精确定位组件中的接近开关5输出电信号给plc或程控器,即此时的精确定位组件10处于状态二,弹簧受压,压板倾角减小到0
°
,感应板则也随之向下转动至水平,挡在接近开关5前端,接近开关开始感应输出电信号之后控制机械手停止向下摆动,此刻,钻杆刚好处于夹持器30内,夹持器30夹紧钻杆20,机械手便松开钻杆并向上摆动,动力头开始旋转,通过螺纹与钻杆完成连接。如此,便完成了机械手自动加装钻杆的工作。
24.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种自动钻机机械手精确定位装置,包括安装支架(4),其特征在于,所述安装支架上设置压板(1)、弹簧(3)和接近开关(5),所述压板的一端铰接于安装支架上,且安装支架在距铰接点所定距离通过弹簧作用在压板上,所述压板上设置与接近开关相适配的感应板(6)。2.根据权利要求1所述的自动钻机机械手精确定位装置,其特征在于,所述压板在远离铰接点的上表面设置调节螺栓(2)。3.根据权利要求1所述的自动钻机机械手精确定位装置,其特征在于,所述安装支架呈类c型结构,由套装设置的下l型体与上倒l型体组成。4.根据权利要求1所述的自动钻机机械手精确定位装置,其特征在于,所述接近开关采用光电开关。5.基于权利要求1-4所述的自动钻机机械手精确定位装置的定位方法,其特征在于,包括:利用弹簧支撑压板向上倾斜所定角度,并使接近开关感应不到感应板;再机械手施压于压板上后,使弹簧受压且压板由倾斜状转水平状过程中,由接近开关感应到感应板后,停止机械手动作,完成机械手精确定位。
技术总结
本发明属于机械设计领域,公开了一种自动钻机机械手精确定位装置,包括安装支架,安装支架上设置压板、弹簧和接近开关,压板的一端铰接于安装支架上,且安装支架在距铰接点所定距离通过弹簧作用在压板上,压板上设置与接近开关相适配的感应板。本发明利用压板、弹簧、接近开关和感应板组成的精确定位组件,能够解决机械手定位精度不理想的问题。本发明还提供一种自动钻机机械手精确定位方法,能够达到机械手精确定位的目的。手精确定位的目的。手精确定位的目的。
技术研发人员:马振纲 辛德忠 唐敏 蒲剑 秦怡 陈航 王清峰 万军 刘小华 吕晋军 张始斋 窦鑫 万园 陈柯宇 周富佳 鲁石平 王兴 王伟 雷万年 杜渔舟 陈龙
受保护的技术使用者:中煤科工集团重庆研究院有限公司
技术研发日:2022.03.30
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1