一种综采工作面的自动化采煤系统装置及采煤方法与流程
1.本发明属于煤矿开采技术领域,涉及一种综采工作面的自动化采煤系统装置及采煤方法。
背景技术:
2.矿的开采为了安全一般是从前向后采,先打通巷道进入计划开采面积的远处,正式开采时的综采工作面称回采综采工作面。在煤层或矿床的开采过程中,一般把直接进行采煤或矿物的工作空间称为回采综采工作面或简称为采场。赋存在煤层之上的岩层称为顶板或称为上覆岩层,位于煤层下方的岩层称为底板。一般把直接位于煤层上方的一层或几层性质相近的岩层称为直接顶。
3.在煤矿生产系统中,综采工作面是最基本的生产单元,也是生产的第一现场,其生产过程复杂、装备群规模庞大、作业环境恶劣,在煤矿综采工作面十分容易发生事故,造成停工停产,造成很大的损失。因此,综采工作面运行状态实时监测与精准反向控制对实现煤炭安全、智能、高效、绿色开采具有重要意义。
4.传统综采工作面智能监控方式主要包括视频监控与二维组态监控。视频监控采用可见光摄像机对综采装备运行状态、综采工作面环境等进行监测,是当前综采工作面智能化开采远程监控最主要的途径。
5.煤矿智能化已成为煤炭工业高质量发展的核心技术支撑与煤炭工业转型升级的核心驱动力,应用新一代信息技术、智能制造技术和人工智能技术建设智能化矿山,已成为行业共识。
6.cn103726844a公开了一种基于采煤综采工作面的自动采煤方法,该方法包括:
7.根据待开采区域的采掘工程平面图和地质钻孔数据确定所述待开采区域的上综采工作面、下综采工作面、煤层高度、煤层厚度、以及采煤设备布置情况;以及采煤装置根据所确定的所述待开采区域的上综采工作面、下综采工作面、煤层高度、煤层厚度进行自动采煤操作。
8.cn102536244a公开了一种薄煤层滚筒采煤装置自动化综采工作面采煤方法,所采取的技术方案是按照以下步骤操作:a、设备安装,在采区布置用于综采工作面煤炭运输的运输巷道和回风巷道,并在运输巷道和回风巷道之间开切眼,沿综采工作面先铺设刮板机、液压支架和采煤装置,b、割煤,采煤装置往复运动推进综采工作面,c、运煤,通过刮板机、转载机和皮带运输机将煤运送到地面。
9.cn105182820a公开了一种煤矿综采工作面大型装备集中控制平台的实现方法,其所述方法是基于煤矿综采工作面大型装备各子系统,包括采煤装置系统、液压支架系统、综采工作面运输系统、乳化液泵站系统、移动变电站系统和视频监控系统,并通过控制层高速工控机及其高速数据采集卡、前端开发平台、数据库、通讯网络,在集中控制平台的集中协调控制下,实现煤矿井下综采工作面大型装备各子系统按采煤工艺自动进行无人值守的采煤方法;所述集中控制平台的实现方法包括实时监测、集中协调控制和信息通讯网络。
10.但上述方案主要通过可视化数据与监测曲线实现对综采工作面运行状态的展示,表现形式较为单一,缺乏与综采工作面实体的动态融合,在直观性上存在不足。此外,为了提高采煤综采工作面的自动化水平,减少井下作业人员,提高煤矿安全生产水平,减少煤矿矸石出矸量,节约能源,就必须要实现采煤综采工作面的无人或少人化开采,实现采煤设备的远程操作,就必须要实现采煤综采工作面的煤岩识别,实现采煤装置的自动或远程控制割煤。
技术实现要素:
11.针对现有技术存在的不足,本发明的目的在于提供一种综采工作面的自动化采煤系统装置及采煤方法,本发明在采煤装置上安装了位姿监测模块,位姿监测模块随采煤装置的运动过程中,实时监测采煤装置的位置、移动速率和加速度数据,从而测算出采煤装置在综采工作面上的移动轨迹。通过模型搭建模块对综采工作面进行建模,控制中心将综采工作面的三维数字模型以及采煤装置的移动轨迹进行整合,结合煤岩界面识别模块对煤壁中煤岩层的界面探测结果对采煤装置的移动轨迹进行修正,由于采用了综采工作面三维实时探测手段,控制中心生成的修正后移动轨迹可以随着采煤装置和综采工作面的推进而动态更新,真正实现了综采工作面无人值守的自动化采煤目标。
12.为达此目的,本发明采用以下技术方案:
13.第一方面,本发明提供了一种综采工作面的自动化采煤系统装置,所述自动化采煤系统装置包括位于综采工作面一侧的若干液压支架,所述液压支架的顶部支撑所述综采工作面顶板,所述液压支架与所述综采工作面之间形成综采通道,所述综采通道内设置有采煤装置以及沿综采工作面长度方向铺设的输送装置,所述采煤装置外接驱动装置,所述驱动装置用于带动所述采煤装置沿综采工作面的长度方向往复推进并对综采工作面的煤壁进行切割,切割下的煤块落入所述输送装置;
14.所述综采通道内设置有模型搭建模块,所述模型搭建模块用于对综采工作面进行扫描并构建综采工作面的三维模型;所述采煤装置上设置有煤岩界面识别模块和位姿监测模块,所述煤岩界面识别模块用于识别煤壁上的煤岩分界情况,所述位姿监测模块用于采集所述采煤装置在综采工作面三维模型内的实时位置坐标和移动姿态;
15.所述自动化采煤系统装置还包括控制中心,所述控制中心分别无线连接所述模型搭建模块、所述煤岩界面识别模块、所述位姿监测模块以及所述驱动装置,所述控制中心根据煤壁上的煤岩分界情况对采煤装置当前的移动轨迹进行修正,控制所述驱动装置带动采煤装置沿修正后的移动轨迹对煤壁进行切割。
16.本发明在采煤装置上安装了位姿监测模块,位姿监测模块随采煤装置的运动过程中,实时监测采煤装置的位置、移动速率和加速度数据,从而测算出采煤装置在综采工作面上的移动轨迹。通过模型搭建模块对综采工作面进行建模,控制中心将综采工作面的三维数字模型以及采煤装置的移动轨迹进行整合,结合煤岩界面识别模块对煤壁中煤岩层的界面探测结果对采煤装置的移动轨迹进行修正,由于采用了综采工作面三维实时探测手段,控制中心生成的修正后移动轨迹可以随着采煤装置和综采工作面的推进而动态更新,真正实现了综采工作面无人值守的自动化采煤目标。
17.作为本发明一种优选的技术方案,所述控制中心包括主控平台和通信基站,所述
通信基站通过无线链路连接所述通信基站,所述主控平台用于监控采煤装置的移动轨迹并计算移动轨迹的倾斜角度,通过所述通信基站控制所述采煤装置调整运动轨迹,实现对综采工作面的调斜;
18.本发明中,主控平台根据位姿监测模块采集到的采煤装置的实时绝对坐标,描绘出采煤装置的移动轨迹,并确定采煤装置的运动轨迹与进风巷和出风巷的交点,通过交点之间的连线与进风巷和出风巷的夹角大小可以进一步判断综采工作面是否水平,若不水平,主控平台还需确定综采工作面的调斜参数,控制采煤装置调整运动轨迹,对采煤综采工作面进行调斜。
19.优选地,所述主控平台包括控制面板、显示屏和数据采集卡,所述数据采集卡与所述通信基站通过无线连接,所述数据采集卡分别电性连接所述控制面板和显示屏。
20.优选地,所述控制面板包括集成总控单元、液压支架控制单元、输送装置控制单元和采煤装置控制单元,所述液压支架控制单元与所述液压支架电性连接,所述液压支架控制单元用于控制每一所述液压支架的推溜、移架和位姿调整,所述输送装置控制单元用于控制所述输送装置的启停和传送速度,所述采煤装置控制单元用于控制采煤装置的启停、位姿调整和移动轨迹。
21.作为本发明一种优选的技术方案,所述模型搭建模块包括设置于所述采煤装置机身上的激光扫描装置,所述激光扫描装置随所述采煤装置的移动对综采工作面进行扫描,通过所述激光扫描装置的扫描数据和采煤装置的位置信息构建综采工作面煤壁的综采工作面模型。
22.作为本发明一种优选的技术方案,所述煤岩界面识别模块包括喷头、压力传感器和控制元件,所述喷头固定于所述采煤装置上,所述压力传感器固定于所述喷头上,所述压力传感器电性连接所述控制元件,所述喷头用于向煤壁喷出射流,所述喷头喷出的射流经煤壁反弹后形成反射流对所述压力传感器产生作用力,所述压力传感器将反射流产生的压力感应信号传输至控制元件,煤层和岩层反弹形成的反射流的压力不同,所述控制元件根据反射流的压力分析煤岩层的界面。
23.优选地,所述控制元件与所述通信基站无线连接,所述控制元件通过所述通信基站将煤岩界面识别结果发送至所述控制中心。
24.本发明中,喷头斜向上喷射具有足够能量的射流,在喷射过程中需要控制射流压力,使其可以穿透煤层而不能穿透煤层后的岩层,此时,射流冲击煤层和岩层时会出现不同现象。射流打在相对松软的煤层上时,煤层被击穿,射流的巨大能量被煤层吸收,因此射中煤层的射流速度会迅速降低变小,另外由于煤层破碎后呈不规则形状并四处飞溅,射流冲击煤层后形成的反射流会向四周发散,而不会形成较为集中的流束。而当煤层被全部击穿后,射流开始冲击至岩层,但岩层强度远高于煤层,因此射流的压力远不足以击穿岩层,且岩层相对煤层的质地更加致密平整,因此,射流冲击至岩层后形成的反射流会以极快的速度被反射回来且仍能保持稳定的流束,形成的反射流冲击至喷嘴上并被压力传感器捕捉,控制元件根据反射流的压力大小测算采煤装置是否已接近煤岩界面,如已接近煤岩界面,则控制中心需要控制采煤装置的摇臂下降。
25.作为本发明一种优选的技术方案,所述位姿监测模块包括姿态监测单元、位置监测单元和单片机,所述姿态监测单元和位置监测单元分别电性连接所述单片机,所述单片
机电性连接所述控制中心;所述姿态监测单元和位置监测单元分别用于检测采煤装置当前的运动姿态和移动距离,并将数据传输至单片机,所述单片机将数据整合后通过所述通信基站发送至所述控制中心。
26.作为本发明一种优选的技术方案,所述姿态监测单元包括设置于采煤装置上的加速度传感器和陀螺仪,所述加速度传感器用于检测采煤装置移动过程中各轴的加速度,所述陀螺仪用于检测采煤装置移动过程中各轴的角加速度;
27.优选地,所述姿态监测单元还包括依次电性连接的模数转换器和信号调制器,所述姿态监测单元、位置监测单元分别电性连接所述模数转换器的输入端口;
28.优选地,所述单片机包括依次电性连接的滤波器、处理器和无线信号发射器,所述信号调制器的输出端口与所述滤波器电性连接,所述单片机通过所述无线信号发射器与所述通信基站实现无线通信,所述单片机将采集到的姿态信息通过所述通信基站发送至控制中心。
29.需要说明的是,加速度传感器和陀螺仪容易产生累积偏差,且信号不稳定,因此,本发明设置了模数转换器、信号调制器和滤波器,对采集到的加速度信号和旋转角度信号进行处理,从而得到加速度和角速度的最优估值,实现对信号的降噪和放大,使得信号传输更稳定。
30.作为本发明一种优选的技术方案,所述位置监测单元包括红外发射器和若干识别标签,所述红外发射器固定于所述采煤装置的机身上,每一所述液压支架上设置有一所述识别标签,所述识别标签具有唯一身份标识信息,所述识别标签与通信基站进行无线通信;所述红外发射器向所述识别标签发射光定位信号,所述识别标签接受光定位信号后向单片机发送感应信号和身份标识信息,所述单片机根据感应信号计算身份标识信息对应的所述液压支架与采煤装置之间的距离,随着采煤装置的移动推进,所述单片机不断计算所述采煤装置与各所述液压支架之间的距离变化,汇总后得到所述采煤装置的位移信息,所述单片机将采集到的位移信息通过所述通信基站发送至控制中心;
31.所述控制中心将采煤装置的姿态信息和位移信息进行整合并解算出采煤装置在综采工作面三维模型中的实时移动轨迹,根据煤岩分界情况对采煤装置的位姿进行修正,并通过所述驱动装置控制所述采煤装置沿修正后的移动轨迹对煤壁进行切割。
32.作为本发明一种优选的技术方案,所述综采通道内分布有若干视频监控模块,所述视频监控模块无线连接所述控制中心,所述视频监控模块用于采集液压支架、输送装置和综采工作面区域内的实时视频信号并上传至控制中心,所述控制中心实时监控综采通道内是否出现可疑人员;
33.优选地,所述液压支架工作区域内设置有至少一个第一摄像装置,所述第一摄像装置的监控区域覆盖所述液压支架的工作范围,所述第一摄像装置用于采集液压支架区域内的作业人员视频信号并进行人体追踪拍摄;所述控制中心电性连接报警装置和所述液压支架,所述控制中心根据第一摄像装置内拍摄的作业人员位置控制所述液压支架和所述报警装置;
34.优选地,所述输送装置工作区域内设置有至少一个第二摄像装置,所述第二摄像装置的监控区域覆盖所述输送装置的工作范围,所述第二摄像装置用于采集输送装置区域内的作业人员视频信号并进行人体追踪拍摄;所述控制中心电性连接报警装置和所述输送
装置,所述控制中心根据第二摄像装置内拍摄的作业人员位置控制所述输送装置和所述报警装置;
35.优选地,所述综采工作面的两端设置有第三摄像装置,所述第三摄像装置采集作业人员进出综采工作面的视频画面并上传至控制中心,所述控制中心根据作业人员的进出画面实时统计当前处于综采工作面内的作业人员数量;
36.优选地,所述第一摄像装置、第二摄像装置和第三摄像装置的结构相同,均包括红外传感器、摄像头、驱动电机和控制器,所述红外传感器电性连接所述控制器,所述驱动电机传动连接所述摄像头,所述控制器根据所述红外传感器传输的红外信号锁定正在移动的作业人员,并向驱动电机发出控制指令,通过所述驱动电机带动所述摄像头对移动的井下作业人员进行追踪拍摄。
37.第二方面,本发明提供了一种采用第一方面所述的综采工作面的自动化采煤系统装置的采煤方法,所述采煤方法包括:
38.通过位姿监测模块获取采煤装置在综采工作面三维空间内的位置坐标进行精确定位并获得采煤装置的实时运行轨迹线;控制中心根据煤岩界面识别模块分析得到的煤岩分界情况,并对采煤装置当前的实时运行轨迹线进行修正,控制驱动装置带动采煤装置沿修正后的移动轨迹对煤壁进行切割。
39.作为本发明一种优选的技术方案,所述采煤方法包括如下步骤:
40.(1)在采煤装置的移动过程中,采煤装置上设置的加速度传感器和陀螺仪检测采煤装置在移动过程中各轴的加速度以及各轴的角加速度,并传输至单元机,经单片机整合后形成姿态信息;采煤装置上设置的红外发射器向各液压支架上的识别标签发射光定位信号,识别标签接受光定位信号后向单片机发送感应信号和身份标识信息,单片机根据感应信号计算身份标识信息对应的液压支架与采煤装置之间的距离,随着采煤装置的移动推进,单片机不断计算采煤装置与各液压支架之间的距离变化,整合后得到采煤装置的位移信息,单片机将整合后的姿态信息和位移信息通过通信基站发送至控制中心;
41.(2)采煤装置对综采工作面的煤壁进行切割的过程中,通过采煤装置上设置的喷头向煤壁喷出射流,喷头喷出的射流经煤壁反弹后形成反射流对压力传感器产生作用力,压力传感器将反射流产生的压力感应信号传输至控制元件,煤层和岩层反弹形成的反射流的压力不同,控制元件根据反射流的压力分析煤岩层的界面,控制元件通过通信基站将煤岩界面识别结果发送至控制中心;
42.(3)控制中心将步骤(1)中获取的采煤装置姿态信息和位移信息进行整合并解算出采煤装置在综采工作面三维模型中的实时移动轨迹并计算移动轨迹的倾斜角度,根据步骤(2)中获取的煤壁上的煤岩层界面情况对采煤装置当前的移动轨迹和倾斜角度进行修正,控制驱动装置带动采煤装置沿修正后的移动轨迹对煤壁进行切割。
43.所述系统是指设备系统、装置系统或生产装置。
44.与现有技术相比,本发明的有益效果为:
45.本发明在采煤装置上安装了位姿监测模块,位姿监测模块随采煤装置的运动过程中,实时监测采煤装置的位置、移动速率和加速度数据,从而测算出采煤装置在综采工作面上的移动轨迹。通过模型搭建模块对综采工作面进行建模,控制中心将综采工作面的三维数字模型以及采煤装置的移动轨迹进行整合,结合煤岩界面识别模块对煤壁中煤岩层的界
面探测结果对采煤装置的移动轨迹进行修正,由于采用了综采工作面三维实时探测手段,控制中心生成的修正后移动轨迹可以随着采煤装置和综采工作面的推进而动态更新,真正实现了综采工作面无人值守的自动化采煤目标。
附图说明
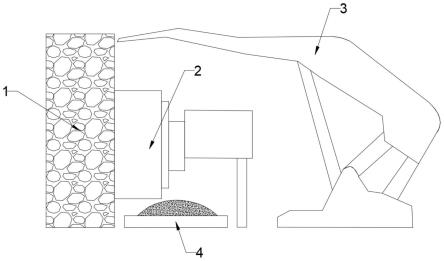
46.图1为本发明一个具体实施方式提供的自动化采煤系统装置的结构示意图。
47.其中,1-综采工作面;2-采煤装置;3-液压支架;4-输送装置。
具体实施方式
48.需要理解的是,在本发明的描述中,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
49.需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
50.下面通过具体实施方式来进一步说明本发明的技术方案。
51.在一个具体实施方式中,本发明提供了一种综采工作面1的自动化采煤系统装置,如图1所示,所述自动化采煤系统装置包括位于综采工作面1一侧的若干液压支架3,所述液压支架3的顶部支撑所述综采工作面1顶板,所述液压支架3与所述综采工作面1之间形成综采通道,所述综采通道内设置有采煤装置2以及沿综采工作面1长度方向铺设的输送装置4,所述采煤装置2外接驱动装置,所述驱动装置用于带动所述采煤装置2沿综采工作面1的长度方向往复推进并对综采工作面1的煤壁进行切割,切割下的煤块落入所述输送装置4;
52.所述综采通道内设置有模型搭建模块,所述模型搭建模块用于对综采工作面1进行扫描并构建综采工作面1的三维模型;所述采煤装置2上设置有煤岩界面识别模块和位姿监测模块,所述煤岩界面识别模块用于识别煤壁上的煤岩分界情况,所述位姿监测模块用于采集所述采煤装置2在综采工作面1三维模型内的实时位置坐标和移动姿态;
53.所述自动化采煤系统装置还包括控制中心,所述控制中心分别无线连接所述模型搭建模块、所述煤岩界面识别模块、所述位姿监测模块以及所述驱动装置,所述控制中心根据煤壁上的煤岩分界情况对采煤装置2当前的移动轨迹进行修正,控制所述驱动装置带动采煤装置2沿修正后的移动轨迹对煤壁进行切割。
54.本发明在采煤装置2上安装了位姿监测模块,位姿监测模块随采煤装置2的运动过程中,实时监测采煤装置2的位置、移动速率和加速度数据,从而测算出采煤装置2在综采工
作面1上的移动轨迹。通过模型搭建模块对综采工作面1进行建模,控制中心将综采工作面1的三维数字模型以及采煤装置2的移动轨迹进行整合,结合煤岩界面识别模块对煤壁中煤岩层的界面探测结果对采煤装置2的移动轨迹进行修正,由于采用了综采工作面1三维实时探测手段,控制中心生成的修正后移动轨迹可以随着采煤装置2和综采工作面1的推进而动态更新,真正实现了综采工作面1无人值守的自动化采煤目标。
55.进一步地,所述控制中心包括主控平台和通信基站,所述通信基站通过无线链路连接所述通信基站,所述主控平台用于监控采煤装置2的移动轨迹并计算移动轨迹的倾斜角度,通过所述通信基站控制所述采煤装置2调整运动轨迹,实现对综采工作面1的调斜。
56.本发明中,主控平台根据位姿监测模块采集到的采煤装置2的实时绝对坐标,描绘出采煤装置2的移动轨迹,并确定采煤装置2的运动轨迹与进风巷和出风巷的交点,通过交点之间的连线与进风巷和出风巷的夹角大小可以进一步判断综采工作面1是否水平,若不水平,主控平台还需确定综采工作面1的调斜参数,控制采煤装置2调整运动轨迹,对采煤综采工作面1进行调斜。
57.进一步地,所述主控平台包括控制面板、显示屏和数据采集卡,所述数据采集卡与所述通信基站通过无线连接,所述数据采集卡分别电性连接所述控制面板和显示屏。
58.进一步地,所述控制面板包括集成总控单元、液压支架3控制单元、输送装置4控制单元和采煤装置2控制单元,所述液压支架3控制单元与所述液压支架3电性连接,所述液压支架3控制单元用于控制每一所述液压支架3的推溜、移架和位姿调整,所述输送装置4控制单元用于控制所述输送装置4的启停和传送速度,所述采煤装置2控制单元用于控制采煤装置2的启停、位姿调整和移动轨迹。
59.进一步地,所述模型搭建模块包括设置于所述采煤装置2机身上的激光扫描装置,所述激光扫描装置随所述采煤装置2的移动对综采工作面1进行扫描,通过所述激光扫描装置的扫描数据和采煤装置2的位置信息构建综采工作面1煤壁的综采工作面1模型。
60.进一步地,所述煤岩界面识别模块包括喷头、压力传感器和控制元件,所述喷头固定于所述采煤装置2上,所述压力传感器固定于所述喷头上,所述压力传感器电性连接所述控制元件,所述喷头用于向煤壁喷出射流,所述喷头喷出的射流经煤壁反弹后形成反射流对所述压力传感器产生作用力,所述压力传感器将反射流产生的压力感应信号传输至控制元件,煤层和岩层反弹形成的反射流的压力不同,所述控制元件根据反射流的压力分析煤岩层的界面。
61.进一步地,所述控制元件与所述通信基站无线连接,所述控制元件通过所述通信基站将煤岩界面识别结果发送至所述控制中心。
62.本发明中,喷头斜向上喷射具有足够能量的射流,在喷射过程中需要控制射流压力,使其可以穿透煤层而不能穿透煤层后的岩层,此时,射流冲击煤层和岩层时会出现不同现象。射流打在相对松软的煤层上时,煤层被击穿,射流的巨大能量被煤层吸收,因此射中煤层的射流速度会迅速降低变小,另外由于煤层破碎后呈不规则形状并四处飞溅,射流冲击煤层后形成的反射流会向四周发散,而不会形成较为集中的流束。而当煤层被全部击穿后,射流开始冲击至岩层,但岩层强度远高于煤层,因此射流的压力远不足以击穿岩层,且岩层相对煤层的质地更加致密平整,因此,射流冲击至岩层后形成的反射流会以极快的速度被反射回来且仍能保持稳定的流束,形成的反射流冲击至喷嘴上并被压力传感器捕捉,
控制元件根据反射流的压力大小测算采煤装置2是否已接近煤岩界面,如已接近煤岩界面,则控制中心需要控制采煤装置2的摇臂下降。
63.进一步地,所述位姿监测模块包括姿态监测单元、位置监测单元和单片机,所述姿态监测单元和位置监测单元分别电性连接所述单片机,所述单片机电性连接所述控制中心;所述姿态监测单元和位置监测单元分别用于检测采煤装置2当前的运动姿态和移动距离,并将数据传输至单片机,所述单片机将数据整合后通过所述通信基站发送至所述控制中心。
64.进一步地,所述姿态监测单元包括设置于采煤装置2上的加速度传感器和陀螺仪,所述加速度传感器用于检测采煤装置2移动过程中各轴的加速度,所述陀螺仪用于检测采煤装置2移动过程中各轴的角加速度。
65.进一步地,所述姿态监测单元还包括依次电性连接的模数转换器和信号调制器,所述姿态监测单元、位置监测单元分别电性连接所述模数转换器的输入端口。
66.进一步地,所述单片机包括依次电性连接的滤波器、处理器和无线信号发射器,所述信号调制器的输出端口与所述滤波器电性连接,所述单片机通过所述无线信号发射器与所述通信基站实现无线通信,所述单片机将采集到的姿态信息通过所述通信基站发送至控制中心。
67.需要说明的是,加速度传感器和陀螺仪容易产生累积偏差,且信号不稳定,因此,本发明设置了模数转换器、信号调制器和滤波器,对采集到的加速度信号和旋转角度信号进行处理,从而得到加速度和角速度的最优估值,实现对信号的降噪和放大,使得信号传输更稳定。
68.进一步地,所述位置监测单元包括红外发射器和若干识别标签,所述红外发射器固定于所述采煤装置2的机身上,每一所述液压支架3上设置有一所述识别标签,所述识别标签具有唯一身份标识信息,所述识别标签与通信基站进行无线通信;所述红外发射器向所述识别标签发射光定位信号,所述识别标签接受光定位信号后向单片机发送感应信号和身份标识信息,所述单片机根据感应信号计算身份标识信息对应的所述液压支架3与采煤装置2之间的距离,随着采煤装置2的移动推进,所述单片机不断计算所述采煤装置2与各所述液压支架3之间的距离变化,汇总后得到所述采煤装置2的位移信息,所述单片机将采集到的位移信息通过所述通信基站发送至控制中心。
69.所述控制中心将采煤装置2的姿态信息和位移信息进行整合并解算出采煤装置2在综采工作面1三维模型中的实时移动轨迹,根据煤岩分界情况对采煤装置2的位姿进行修正,并通过所述驱动装置控制所述采煤装置2沿修正后的移动轨迹对煤壁进行切割。
70.进一步地,所述综采通道内分布有若干视频监控模块,所述视频监控模块无线连接所述控制中心,所述视频监控模块用于采集液压支架3、输送装置4和综采工作面1区域内的实时视频信号并上传至控制中心,所述控制中心实时监控综采通道内是否出现可疑人员。
71.进一步地,所述液压支架3工作区域内设置有至少一个第一摄像装置,所述第一摄像装置的监控区域覆盖所述液压支架3的工作范围,所述第一摄像装置用于采集液压支架3区域内的作业人员视频信号并进行人体追踪拍摄;所述控制中心电性连接报警装置和所述液压支架3,所述控制中心根据第一摄像装置内拍摄的作业人员位置控制所述液压支架3和
所述报警装置。
72.进一步地,所述输送装置4工作区域内设置有至少一个第二摄像装置,所述第二摄像装置的监控区域覆盖所述输送装置4的工作范围,所述第二摄像装置用于采集输送装置4区域内的作业人员视频信号并进行人体追踪拍摄;所述控制中心电性连接报警装置和所述输送装置4,所述控制中心根据第二摄像装置内拍摄的作业人员位置控制所述输送装置4和所述报警装置。
73.进一步地,所述综采工作面1的两端设置有第三摄像装置,所述第三摄像装置采集作业人员进出综采工作面1的视频画面并上传至控制中心,所述控制中心根据作业人员的进出画面实时统计当前处于综采工作面1内的作业人员数量;
74.进一步地,所述第一摄像装置、第二摄像装置和第三摄像装置的结构相同,均包括红外传感器、摄像头、驱动电机和控制器,所述红外传感器电性连接所述控制器,所述驱动电机传动连接所述摄像头,所述控制器根据所述红外传感器传输的红外信号锁定正在移动的作业人员,并向驱动电机发出控制指令,通过所述驱动电机带动所述摄像头对移动的井下作业人员进行追踪拍摄。
75.在另一个具体实施方式中,本发明提供了一种采用上述的综采工作面1的自动化采煤系统装置的采煤方法,所述采煤方法包括:
76.通过位姿监测模块获取采煤装置2在综采工作面1三维空间内的位置坐标进行精确定位并获得采煤装置2的实时运行轨迹线;控制中心根据煤岩界面识别模块分析得到的煤岩分界情况,并对采煤装置2当前的实时运行轨迹线进行修正,控制驱动装置带动采煤装置2沿修正后的移动轨迹对煤壁进行切割。
77.进一步地,所述采煤方法包括如下步骤:
78.(1)在采煤装置2的移动过程中,采煤装置2上设置的加速度传感器和陀螺仪检测采煤装置2在移动过程中各轴的加速度以及各轴的角加速度,并传输至单元机,经单片机整合后形成姿态信息;采煤装置2上设置的红外发射器向各液压支架3上的识别标签发射光定位信号,识别标签接受光定位信号后向单片机发送感应信号和身份标识信息,单片机根据感应信号计算身份标识信息对应的液压支架3与采煤装置2之间的距离,随着采煤装置2的移动推进,单片机不断计算采煤装置2与各液压支架3之间的距离变化,整合后得到采煤装置2的位移信息,单片机将整合后的姿态信息和位移信息通过通信基站发送至控制中心;
79.(2)采煤装置2对综采工作面1的煤壁进行切割的过程中,通过采煤装置2上设置的喷头向煤壁喷出射流,喷头喷出的射流经煤壁反弹后形成反射流对压力传感器产生作用力,压力传感器将反射流产生的压力感应信号传输至控制元件,煤层和岩层反弹形成的反射流的压力不同,控制元件根据反射流的压力分析煤岩层的界面,控制元件通过通信基站将煤岩界面识别结果发送至控制中心;
80.(3)控制中心将步骤(1)中获取的采煤装置2姿态信息和位移信息进行整合并解算出采煤装置2在综采工作面1三维模型中的实时移动轨迹并计算移动轨迹的倾斜角度,根据步骤(2)中获取的煤壁上的煤岩层界面情况对采煤装置2当前的移动轨迹和倾斜角度进行修正,控制驱动装置带动采煤装置2沿修正后的移动轨迹对煤壁进行切割。
81.申请人声明,以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,所属技术领域的技术人员应该明了,任何属于本技术领域的技术人员在本发明揭
露的技术范围内,可轻易想到的变化或替换,均落在本发明的保护范围和公开范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1