一种煤矿用定向钻机的发动机转速控制方法与流程
1.本发明涉及煤矿层钻进技术领域,具体涉及一种煤矿用定向钻机的发动机转速控制方法。
背景技术:
2.定向钻机在煤矿采掘中承担着定向钻孔的重要作用。通常情况下,煤矿用定向钻机在不同工况下作业时发动机均处在或近乎处在额定功率的全功率工作状态,这种工作方式虽然能够保证输出较大的扭矩和转速,提高钻进速度而缩短工程周期,但由于全功率并非且大概率不是发动机的效率最高状态,所以该种工作方式会造成很大的能源浪费,导致钻机的动力性和节能性较差。
3.现有技术虽然给出了根据钻进过程中所处不同工况而对应给定发动机转速并将发动机转速保持在给定值的改进技术,但其所给定的发动机转速一般是凭经验设置的,且所给定的发动机转速显然并不能完全符合实际工程中类型多样的作业对象,所以虽有改进,但发动机的工作效率和节能性依然较差。
技术实现要素:
4.为进一步提高煤矿采掘时定向钻机中发动机的工作效率和节能性,本发明提供了一种煤矿用定向钻机的发动机转速控制方法,所采用的技术方案具体如下:本发明的一种煤矿用定向钻机的发动机转速控制方法,包括以下步骤:钻进过程中实时获取实际钻头位置信息,根据实际钻头位置信息与预设的钻机三维工作路径,确定钻进轨迹偏移程度;钻进过程中连续采集钻头图像,将每张钻头图像与未钻进作业的钻头图像以帧差法作差得到差值图像,将所有差值图像进行或运算确定钻头振动范围,根据所确定的钻头振动范围计算钻头振动的不规则性;拍摄钻进作业对象表面图像,以帧差法确定钻进产生的掉落物,根据作业对象种类以及单位时间内钻进产生的掉落物的数量确定钻机的工作效率;对所述钻进轨迹偏移程度、钻头振动的不规则性以及钻机的工作效率进行归一化处理,计算钻机中发动机当前转速的评价值:其中,为发动机当前转速的评价值,为归一化后的钻机的工作效率,为归一化后的钻进轨迹偏移程度,为归一化后的钻头振动的不规则性;判断评价值与阈值的大小:若,不调整发动机当前转速;若,当时,,当时,
,对更新后的发动机转速重新计算其评价值并进行转速调整,直至调整后转速的评价值大于阈值,其中为发动机当前转速,为调整后的发动机转速,阈值的取值根据经验设置。
5.本发明的有益效果为:本发明该种煤矿用定向钻机的发动机转速控制方法,在钻机钻进过程中实时获取钻头位置并与预设的钻机三维工作路径进行对比,确定钻进轨迹偏移程度,同时实时拍摄钻进过程中钻头图像并与未钻进作业的钻头图像作差得到帧差图像,以所有帧差图像确定钻头振动范围后确定钻头振动的不规则性,以及,实时拍摄钻进作业对象表面图像以确定钻进产生的掉落物数量以确定钻机工作效率,以所得钻进轨迹偏移程度、钻头振动的不规则性、钻机工作效率对发动机当前转速进行评价,并以所得三种参数完成转速修正。本发明该方法可在任意工况下完成钻机中发动机转速的实时修正,使发动机保持在最佳转速状态,提高发动机工作效率和节能性。
6.进一步的,所述钻进轨迹偏移程度为:进一步的,所述钻进轨迹偏移程度为:其中,为钻进轨迹偏移程度,为实际钻进工作轨迹上第i个钻进坐标点的偏差距离,表示实际钻进工作轨迹上第i个钻进坐标点,表示预设三维工作路径函数曲线上与实际钻进工作轨迹上第i个钻进坐标点距离最近的钻进坐标点,n表示实际钻进工作轨迹上钻进坐标点的总数。
7.进一步的,确定所述钻头振动的不规则性的过程为:在所述钻头振动范围的内外边缘上各设置m个采样点,计算内边缘上的采样点a点与外边缘上采样点b之间的距离:其中,d为内边缘上的采样点a点与外边缘上采样点b之间的距离,为内边缘上采样点a的坐标,为外边缘上采样点b的坐标;确定与内边缘上采样点a距离最近的外边缘上采样点,连接两点后确定两点所形成的线段的长度l,m个采样点对应获得m个长度l,以长度l之间的不规则性代表钻头振动的不规则性:的不规则性:其中,g表示钻头振动的不规则性,表示得到的第j种线段的长度,表示第
j种长度的线段出现的概率,表示长度为的线段出现的次数,m表示线段长度的总数。
8.进一步的,所述钻机的工作效率为:其中,w为钻机工作效率,s为所拍摄图像中钻进掉落物的总面积,r为煤矿表面物质的坚硬度,r的取值大小根据作业对象的类型确定,取值范围为[0,1],t为所述以帧差法确定钻进产生的掉落物时帧差法的计算时间。
附图说明
[0009]
图1是本发明该种煤矿用定向钻机的发动机转速控制方法的流程图。
具体实施方式
[0010]
下面结合附图及实施例,对本发明的一种煤矿用定向钻机的发动机转速控制方法进行详细说明。
[0011]
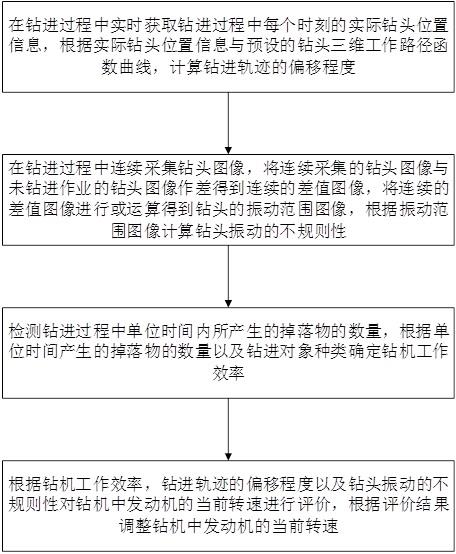
方法实施例:本发明的一种煤矿用定向钻机的发动机转速控制方法实施例,其整体流程如图1所示,具体过程如下:1、在钻进过程中实时获取钻进过程中每个时刻的实际钻头位置信息,根据实际钻头位置信息与预设的钻头三维工作路径函数曲线,计算钻进轨迹的偏移程度。
[0012]
由于钻机在工作时会发生振动,而振动会对实际的工作造成影响,使工作路径发生偏移,导致实际工作路径与预想的工作路径不同,影响开采效率与开采环境的安全,所以本技术通过钻进轨迹的偏移来表征钻进效果的好坏。
[0013]
在实际钻进作业之前,作业人员会根据要钻进的作业对象的类型,以及作业的方式拟定具体的钻头预设三维工作路径函数曲线q(x)。
[0014]
其中作业对象的类型,具体即为要钻进的煤矿地质层的种类,如黏土层,沙质土层,砂砾原石层,软岩层,等等;而作业方式,则是根据钻机和煤矿储层之间的相对位置关系决定的,若钻机已处于和煤矿层水平的地下位置,则钻进方式一般是水平钻进,若钻进处于整个煤矿开采的前期,也即钻机处于地面或地面附近位置,则钻进方式一般是先向下然后再水平钻进,不论什么钻进方式,钻进过程中都需要按照预设的钻进路线进行钻进,也即按照预设三维工作路径函数曲线q(x)进行钻进。
[0015]
在实际钻进过程中,通过定位装置实时记录钻机的三维坐标点(x,y,z),然后将实时记录的钻机的三维坐标点与预设三维工作路径函数曲线q(x)上的三维坐标点进行比较,计算钻进过程中钻进轨迹偏移程度:计算钻进过程中钻进轨迹偏移程度:其中,为钻进轨迹偏移程度,为实际钻进工作轨迹上第i个钻进坐标点的偏
差距离,表示实际钻进工作轨迹上第i个钻进坐标点,表示预设三维工作路径函数曲线上与实际钻进工作轨迹上第i个钻进坐标点距离最近的钻进坐标点,n表示实际钻进工作轨迹上钻进坐标点的总数。
[0016]
偏移程度d越大,说明对于当前作业对象以及当前作业过程来说,当前转速下钻机中发动机的工作效果越差。
[0017]
2、在钻进过程中连续采集钻头图像,将连续采集的钻头图像与未钻进作业的钻头图像作差得到连续的差值图像,将连续的差值图像进行或运算得到钻头的振动范围图像,根据振动范围图像计算钻头振动的不规则性。
[0018]
由于钻机是由发动机带动工作,而发动机工作过程中会不可避免地产生振动,所以钻机钻头在启动运行时也会产生规律振动,通过检测钻机钻头在钻进作业过程中振动是否规律,也可在一定程度上反应钻机工作状态,确定钻机的工作效果的好坏。
[0019]
在钻进过程中连续采集钻机图像,并使用语义分割神经网络对钻头图像进行分割,语义分割神经网络的输入为含有钻机的图像,输出为分割后的钻头图像,类别标签为钻头区域标签为1,其余区域标签为0,得到钻进过程中连续的钻头图像。
[0020]
以帧差法将每张钻头图像分别与未进行钻进作业时的钻头图像进行异或操作,图像中产生变化的区域的灰度值置为1,而未产生变化的区域的灰度值置为0,具体运算规则为:0|0=0;0|1=1;1|0=1;1|1=0,得到一系列表征钻头位置变化的二值化帧差图像。
[0021]
然后,对所有帧差图像相同位置上的像素点进行或运算,具体运算规则为:0|0=0;0|1=1;1|0=1;1|1=1,即参加运算的位置相同的两个像素点中只要有一个灰度值为1,则运算后该位置上的灰度值即为1。
[0022]
对所有帧差图像相同位置上的像素点进行或运算后,便可确定钻头钻进过程中的振动范围,容易理解的是,振动范围应该是一个环形区域。确定振动范围的内外边缘,在内外边缘上各设置m个采样点,计算内边缘上的采样点a点与外边缘上采样点b之间的距离d:其中,d为内边缘上的采样点a点与外边缘上采样点b之间的距离,为内边缘上采样点a的坐标,为外边缘上采样点b的坐标。
[0023]
确定与内边缘上采样点a距离最近的外边缘上采样点,连接两点后确定两点所形成的线段的长度l,则m个采样点可对应获得m个长度l,计算长度l之间的不规则性表征出振动的不规则性:振动的不规则性:其中,g表示钻头振动的不规则性,表示得到的第j种线段的长度,表示第j种长度的线段即振动幅度出现的概率,表示了长度为的该种线段出现的次数,m表示线段长度的总数。
[0024]
不规则性g越大,则说明当前发动机转速下钻机的工作效果越差,说明此时的转速过大,需减小转速。
[0025]
3、检测钻进过程中单位时间内所产生的掉落物的数量,根据单位时间产生的掉落物的数量以及钻进对象种类确定钻机工作效率。
[0026]
钻机钻进效率的高低,直接表现在其钻进产生的掉落物的速度大小上,煤矿钻进过程中除了产生煤块外,煤块表面的砂砾、黏土等物质也会一并掉落。
[0027]
本实施例选择对所拍摄图像中上述掉落物的面积进行统计,来计算钻机的工作效率,具体的,本实施例首先连续拍摄作业对象表面图像,然后使用帧差法对掉落物进行检测,并根据同步拍摄并获取的钻头图像,对作业对象表面图像中的钻头区域进行剔除,由此便可确定钻进掉落物的面积,从而根据钻进掉落物的面积计算出此时钻机的工作效率:其中,w为钻机工作效率,s为所拍摄图像中钻进掉落物的总面积,r为煤矿表面物质的坚硬度,其取值大小根据地质类别也即作业对象的类型确定,取值范围为[0,1],越柔软其值越接近0,t为帧差法的计算时间,使用r*s是为了消除地质柔软性而导致洒落面积较大的影响。
[0028]
4、根据钻机工作效率,钻进轨迹的偏移程度以及钻头振动的不规则性对钻机中发动机的当前转速进行评价,根据评价结果调整钻机中发动机的当前转速。
[0029]
对所得钻机工作效率w、钻进轨迹的偏移程度以及钻头振动的不规则性进行归一化处理,然后计算得到钻机中发动机当前转速的评价值:其中,为发动机当前转速的评价值,为归一化后的钻机工作效率,为归一化后的钻进轨迹的偏移程度,为归一化后的钻头振动的不规则性,越大则说明当前发动机转速下,钻机的工作效果越好转速越不需要进行调整。
[0030]
设置阈值u对进行判断,根据经验值设置阈值u=0.9。若大于阈值u,则认为此转速下,钻机工作较好,无需对转速进行调整,即此时转速为最优转速;否则,需对转速进行调整,调整过程如下:根据上述归一化后的钻机工作效率、钻进轨迹的偏移程度以及钻头振动的不规则性的具体指标对发动机当前转速进行调整:当时,,当时,。
[0031]
对更新后的转速重新进行转速评价值计算,然后进行转速调整,迭代更新直至所得转速的评价值大于阈值,此时的转速即为满足钻机工作效果的最优转速。
[0032]
以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围,均应包含在
本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1