一种柱塞到达采集、捕捉、释放一体装置及方法与流程
1.本发明属于油气井柱塞气举排水采气技术领域,尤其是涉及柱塞到达采集、捕捉、释放一体的装置及方法。
背景技术:
2.柱塞气举是常规间歇气举一种特殊形式,但其举升效率远远高于常规气举。通过在气相和液相之间增加一个固体界面,在开井后利用环空中气体压缩所储存的压能推柱塞和柱塞上部的液体段塞沿油管向上运动,最终将液体排出井口。
3.相对于常规气举而言,柱塞气举消除了滑脱损失带来的影响,充分的利用了地层自身能量,极大程度地提高了气举效率,且可以在不动管柱的前提下实现气井的排液采气,具有工艺简单,投入成本低,运行维护方便等特点。但是,目前柱塞气举参数的设置多采用现场试验法,由现场工作人员按照经验来设定开关井时间,缺乏科学依据,也很难实现柱塞气举工作制度很好匹配气举井的产气产液生产实际。
4.实现柱塞气举生产智能化,需要解决一系列的软硬件设备和控制,其中柱塞到达井口状态判断和采集,以及柱塞的可靠捕捉与释放是一个急需解决的重要问题。
5.柱塞气举控制过程中需要实时检测柱塞达到信号,柱塞到达信号的准确检测是实现柱塞气举有效控制的基础。目前采用两种方式进行柱塞位置检测。第一种方式是在油管内部固定位置安装传感器直接检测柱塞是否经过参考点,第二种方式是在在油管外部安装传感器检测柱塞撞击油管内壁信号,间接判断柱塞到达。
6.第一种方式即是直接测量方法,常用的位置测量技术有红外光电法、超声波测距法。红外检测法测量柱塞位置时,由于对管测量距离远小于油管内径,只能安装在同侧使用,柱塞上升到检测位置时存在远离测量点的可能性,测量结果准确性不高,而且红外探头需要保持洁净,而井内环境复杂,探头容易附着污垢,导致检测装置失效。超声波检测法应用于油管内部检测柱塞时,由于气流的上窜形成大量气泡产生超声波散射现象,而且油管内部空间小容易产生声波折射增加了检测难度。
7.第二种方式即间接测量方法,主要有速度传感器和加速度传感器。间接测量方式判断柱塞位置的方法是建立柱塞碰撞油管内壁位置距离井口越近,井口油管振感越强的前提条件下,通过分析振动信号进一步判断柱塞运动状态。传感器谐振频率高,容易受到外界的干扰;输出阻抗高,输出信号弱,传感器输出信号需要经过放大电路放大后才能送检测电路检测,容易出现失真。
8.可见,目前国内市场上没有直接提供独立的柱塞到达检测传感器,国内部分石油管材仪器设备公司为解决柱塞到位检测问题提出了管道内部安装监测装置直接检测柱塞是否到达测定点,但安装后设备技术指标不但不易标定,无法规模化投入使用,而且对于柱塞运动状态的监测具有局限性。
9.此外,目前现场采用的是手动柱塞捕捉器。当需要捕捉柱塞时,需人工到井口操作,且现有的捕捉装置是通过柱塞捕捉器中的钢球卡阻柱塞本体沟槽阻挡柱塞下落,对于
衬垫式、刷式等其它无沟槽的柱塞捕捉困难。
10.可见,由于柱塞气举井采用的都是手动柱塞捕捉器,因此在低压低效井实施柱塞气举排水采气工艺,默认开井时由油管气体浮力悬停柱塞,实现开井续流,很难实现。该模式会引起以下故障:造成柱塞在防喷管内上下振荡,引起井口激振,损坏防喷管;柱塞下落井筒,悬停井筒内,影响井筒排气顺畅以及产生节流效应;当低效井井筒压力下降时,柱塞下落井底,提前关井,与设计的柱塞气举制度不符。
技术实现要素:
11.本发明要解决的问题是提供一种柱塞到达采集、捕捉、释放一体装置及方法。
12.为解决上述技术问题,本发明采用的技术方案是:一种柱塞到达采集、捕捉、释放一体装置,包括柱塞捕放执行器,所述柱塞捕放执行器包括芯轴和芯轴推杆,所述芯轴在柱塞捕放执行器内实现往复运动,所述芯轴推杆在芯轴内实现往复运动,该芯轴推杆一端用于接触柱塞或防喷管内壁,该芯轴推杆另一端用于按压位置传感器。
13.进一步地,所述芯轴推杆接触柱塞和防喷管内壁的一端安装有推杆球帽。
14.进一步地,所述芯轴内孔设置有限位台阶,限制芯轴推杆左右往复运动的极限位置。
15.进一步地,所述芯轴内孔设置有弹簧(套设在芯轴推杆上),在所述芯轴推杆没有外力作用下,所述弹簧将芯轴推杆推至最右端。按压所述芯轴推杆右端端部的推杆球帽,该芯轴推杆弹簧左移,芯轴推杆左位时可按压位置传感器。
16.进一步地,所述位置传感器安装于芯轴封板上,该位置传感器通过信号线与柱塞控制器连接。
17.进一步地,所述芯轴为齿条芯轴,所述齿条芯轴与齿轮啮合,所述齿轮的转动可实现齿条芯轴左右往复运动;所述齿轮的齿轮轴两端与封闭式轴承端盖相接处安装有轴承,该齿轮轴与穿通式轴承端盖孔间,设计有密封结构,实现动态密封。
18.进一步地,所述柱塞捕放执行器通过齿轮轴与驱动装置相连,所述驱动装置与柱塞控制器连接,驱动装置可双向驱动;进一步地,所述柱塞捕放执行器下部焊接电机安装座,安装好低速电机-减速器后,安装电机保护罩,达到电机防尘、防水的目的。
19.进一步地,所述柱塞捕放执行器安装于防喷管侧壁的旁通口上。
20.进一步地,所述柱塞捕放执行器通过连接件与防喷管上的旁通法兰连接,该柱塞捕放执行器与旁通法兰连接处设置有密封垫,实现密封连接。
21.一种柱塞到达采集、捕捉、释放方法,包括以下步骤:s1、柱塞到达采集:气井开井后,柱塞上行进入防喷管,柱塞通过防喷管旁通口时,推动芯轴推杆左移,按压位置传感器,位置传感器将柱塞到达信号传输给柱塞控制器,控制终端获取准确的柱塞到达井口信息;s2、柱塞捕捉:柱塞通过后,芯轴推杆回弹,柱塞控制器启动驱动装置带动齿轮旋转,齿轮与齿条芯轴上的齿条啮合,推动芯轴整体向防喷管内移动,当芯轴推杆接触防喷管内壁时,芯轴推
杆停止运动,芯轴继续右移,芯轴封板压缩弹簧,当芯轴封板上的位置传感器接触芯轴推杆时,位置传感器信号传输给柱塞控制器,控制驱动装置停机,完成柱塞捕捉;s3、柱塞释放:在柱塞停留井口状态下,根据气井工作制度,当柱塞控制器发出关井指令时,启动驱动装置反向驱动,芯轴向左运动;推杆球帽离开防喷管内壁,芯轴推杆在弹簧的作用下外伸成自由状态;当芯轴完全缩回装置柱塞捕放执行器时,柱塞在重力作用下下落,再次通过防喷管旁通口(捕捉口),推动芯轴推杆按压芯轴封板上的位置传感器,柱塞控制器接收信号,控制驱动装置停机,完成柱塞释放。
22.本发明具体的效果如下:本发明结构简单,自动化程度高,集多功能于一体,通过柱塞到达时推动芯轴推杆向内按压位置传感器,能够实现柱塞到达时的自动检测,且柱塞通过后弹簧会推动芯轴推杆自动恢复。可见采用机械式结构进行检测会最大程度降低现有测量方法因管内环境和外界干扰而影响检测准确度的可能,检测过程更为直接且降低了检测难度。
23.同时,本发明通过芯轴推杆的往复移动,配合驱动装置对齿条芯轴的双向驱动,可实现柱塞的自动捕捉和释放,无需人工到井口操作,从而使整个柱塞气举过程更加智能化。
24.此外,本发明的柱塞捕放执行器通过法兰固定在防喷管旁通口上,能够方便柱塞捕放执行器的维修与更换。
附图说明
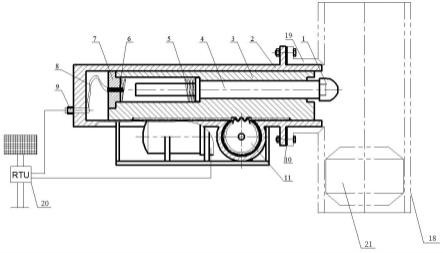
25.下面通过参考附图并结合实例具体地描述本发明,本发明的优点和实现方式将会更加明显,其中附图所示内容仅用于对本发明的解释说明,而不构成对本发明的任何意义上的限制,在附图中:图1是本发明的结构示意图;图2是本发明的侧视图;图3是本发明电机安装位置的俯视示意图;图4是本发明的整体结构安装图;图5是本发明的柱塞到达采集原理图;图6是本发明的柱塞捕捉过程示意图;图7是本发明的柱塞释放过程示意图。
26.图中:1、推杆球帽;2、柱塞捕放执行器;3、齿条芯轴;4、芯轴推杆;5、弹簧;6、位置传感器;7、芯轴封板;8、信号线;9、密封接头;10、密封垫;11、齿轮;12、齿轮轴;13、封闭式轴承端盖;14、穿通式轴承端盖;15、低速电机-减速器;16、电机安装座;17、电机保护罩;18、防喷管;19、旁通法兰;20、柱塞控制器;21、柱塞;22、防喷帽。
具体实施方式
27.如图1至图3所示,本发明一种柱塞到达采集、捕捉、释放一体装置,包括柱塞捕放执行器2、密封垫10、低速电机-减速器15、电机安装座16和电机保护罩17。
28.柱塞捕放执行器2包括推杆球帽1、齿条芯轴3、芯轴推杆4、弹簧5、位置传感器6、芯
轴封板7、信号线8、密封接头9、齿轮11、齿轮轴12、封闭式轴承端盖13和穿通式轴承端盖14。
29.防喷管18侧向开窗,形成旁通口(捕捉口),焊接旁通法兰19,柱塞捕放执行器2通过六个螺栓与防喷管18上的旁通法兰19连接,该柱塞捕放执行器2与旁通法兰19连接处设置有密封垫10,实现密封连接;推杆球帽1通过螺纹与芯轴推杆4端部连接,齿条芯轴3内孔设计有限位台阶,限制芯轴推杆4左右往复运动的极限位置;弹簧5为压缩弹簧,芯轴推杆4没有外力作用下,弹簧5将芯轴推杆4推至最右端;按压芯轴推杆4右端端部的推杆球帽1,该芯轴推杆4压缩弹簧5左移,芯轴推杆4左位时可按压位置传感器6;位置传感器6安装于芯轴封板7上,该位置传感器6通过信号线8与柱塞控制器20连接;信号线8与柱塞控制器通过柱塞捕放执行器2左端的密封接头9相连;齿条芯轴3与齿轮11啮合,齿轮11的转动可实现齿条芯轴3左右往复运动;齿轮轴12两端与封闭式轴承端盖13相接处安装有轴承,该齿轮轴12与穿通式轴承端盖14孔间,设计有密封结构,实现动态密封。
30.柱塞捕放执行器2通过齿轮轴12与低速电机-减速器15(驱动装置)连接,其中的电机与柱塞控制器20连接,电机可正反转;柱塞捕放执行器2下部焊接电机安装座16,安装好低速电机-减速器15后,安装电机保护罩17,达到电机防尘、防水的目的。
31.如图4所示,防喷管18内设置有沿防喷管18运动的柱塞21,该防喷管18的顶部设置有防喷帽22。
32.一种柱塞到达采集、捕捉、释放方法,其特征在于:包括以下步骤:s1、如图5所示,柱塞21到达采集:气井开井后,柱塞21上行进入防喷管18,柱塞21通过防喷管18旁通口(捕捉口)时,推动芯轴推杆4左移,按压芯轴封板7上的位置传感器6,位置传感器6将柱塞21到达信号传输给柱塞控制器20,控制终端获取准确的柱塞到达井口信息。
33.s2、如图6所示,柱塞21捕捉:柱塞通过后,芯轴推杆4回弹,柱塞控制器20启动低速电机-减速器15,带动齿轮11旋转,齿轮11与齿条芯轴3上的齿条啮合,推动齿条芯轴3整体向防喷管内移动,当芯轴推杆4接触防喷管内壁时,芯轴推杆4停止运动,齿条芯轴3继续右移,芯轴封板7压缩弹簧5,当芯轴封板7上的位置传感器6接触芯轴推杆4时,位置传感器6信号传输给柱塞控制器20,控制低速电机-减速器15停机,完成柱塞捕捉。
34.s3、如图7所示,柱塞21释放:在柱塞停留井口状态下,根据气井工作制度,当柱塞控制器20发出关井指令时,启动低速电机-减速器15,电机反转,齿条芯轴3向左运动;推杆球帽1离开防喷管18内壁,芯轴推杆4在弹簧5的作用下外伸成自由状态;当齿条芯轴3完全缩回装置柱塞捕放执行器2时,柱塞21在重力作用下下落,再次通过防喷管18旁通口(捕捉口),推动芯轴推杆4按压芯轴封板7上的位置传感器6,柱塞控制器20接收信号,控制低速电机-减速器15停机,完成柱塞释放。
35.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1