一种可用于较高含水率土壤环境的软体掘进机器人
1.本实用新型属于地下机器人技术领域,尤其涉及一种可用于较高含水率土壤环境的软体掘进机器人。
背景技术:
2.近年来,人类对洋底的勘探证实了海底广泛分布着各种资源。为了确定资源储量并探究其生成机制,有必要在大范围内收集海洋沉积物样品并进行详细调查。然而,现阶段收集海洋沉积物的方法与陆上钻孔测量类似,需要用钻机等设备从勘探船上伸出管道穿到海底。此方法不仅需要配备大型的特殊船舶,采样范围还受限于管道,收集成本高且效率较低。针对上述问题,一些学者提出了一种全新的、低成本的、高效的勘探方法并加以研究——自主掘进机器人。在这类机器人中,气动软体双锚定掘进机器人原理简单、制作方便,受到广泛研究。
3.在目前国内外的试验研究中,受制于海底淤泥极高含水率带来的浮力作用,对气动机器人向下掘进的试验研究远比向上挖出困难,而在双锚定系统中,当锚固段提供的锚固力不足以平衡贯入阻力和浮力的合力时,机器人甚至无法进行向下的有效掘进。
技术实现要素:
4.本实用新型的目的在于:为了解决现有技术受制于海底淤泥极高含水率带来的浮力作用,对气动机器人向下掘进的试验研究远比向上挖出困难的问题,而提出的一种可用于较高含水率土壤环境的软体掘进机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种可用于较高含水率土壤环境的软体掘进机器人,包括穿透锚,所述穿透锚内设置有第三输水软管,所述穿透锚底部固定连接有第二连接柱,所述第二连接柱底部固定有伸缩件,所述伸缩件内设置有第二输水软管,所述伸缩件底部固定连接有第一连接柱,所述第一连接柱底部固定连接有终端锚,所述终端锚内设置有第一输水软管,所述终端锚底部固定连接有刚性锥尖,所述第一输水软管、第二输水软管与第三输水软管一端均固定连接有输水管,且三个输水管外表面固设有软管束,所述输水管另一端固定连接有密闭瓶。
7.作为上述技术方案的进一步描述:
8.所述刚性锥尖底部可拆卸安装有套壳,所述套壳顶部开设有凹槽,所述刚性锥尖与凹槽插置连接。
9.作为上述技术方案的进一步描述:
10.所述密闭瓶顶部一侧固定连接有转换气管,所述转换气管一侧固定连接有三位五通电磁阀,所述三位五通电磁阀顶部固定连接有气动管接头。
11.作为上述技术方案的进一步描述:
12.所述三位五通电磁阀底部固定连接有分流气管,且三个分流气管远离三位五通电磁阀的一端固定连接有同一个分流阀。
13.作为上述技术方案的进一步描述:
14.所述分流阀一侧通过出气管固定连接有空气压缩机,所述空气压缩机一侧固定连接有进气口,所述进气口与出气管固定连接,所述空气压缩机一侧开设有出气口。
15.作为上述技术方案的进一步描述:
16.所述输水管外表面固设有固线器,所述固线器一侧固定连接有支架,所述支架一侧设置有实验桶,所述刚性锥尖插入实验桶内。
17.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
18.1、本实用新型中,通过水气转换装置用充水代替充气,通过第一输水软管、第二输水软管与第三输水软管控制穿透锚、伸缩件和终端锚,通过穿透锚、伸缩件和终端锚各自的形变收缩舒张,能够一定程度上克服了高含水率土壤环境下,机器人向下掘进过程中硅胶腔体所受浮力的影响,提高了掘进深度,适用环境更为广泛。
19.2、本实用新型中,通过设置密闭瓶与三位五通电磁阀,能够实现对穿透锚、伸缩件和终端锚的控制,通过简单联动实现调整作用,降低了制作成本低、消耗能量少,同时终端锚、伸缩件和穿透锚体型小、质地软,因此对土体扰动较小,对生态环境影响较小,避免掘进过程中对环境的破坏,同时,可通过控制程序能够控制调整掘进形成,实现自主掘进,提高了灵活性。
附图说明
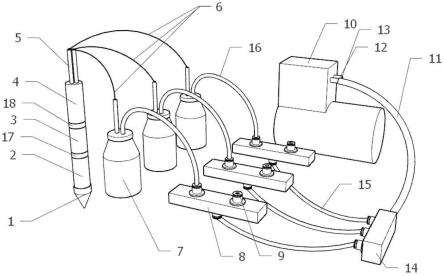
20.图1为本实用新型的立体结构示意图;
21.图2为本实用新型终端锚的正视剖面结构示意图;
22.图3为本实用新型支架与实验桶的正视平面结构示意图;
23.图4为本实用新型套壳与刚性锥尖的正视剖面结构示意图。
24.图例说明:1、刚性锥尖;2、终端锚;3、伸缩件;4、穿透锚;5、软管束; 6、输水管;7、密闭瓶;8、三位五通电磁阀;9、气动管接头;10、空气压缩机; 11、出气管;12、进气口;13、出气口;14、分流阀;15、分流气管;16、转换气管;17、第一连接柱;18、第二连接柱;19、套壳;20、凹槽;21、第一输水软管;22、第二输水软管;23、第三输水软管;24、实验桶;25、支架;26、固线器。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
26.请参阅图1-4,本实用新型提供一种技术方案:一种可用于较高含水率土壤环境的软体掘进机器人,包括穿透锚4,穿透锚4内设置有第三输水软管23,穿透锚4底部固定连接有第二连接柱18,第二连接柱18底部固定有伸缩件3,伸缩件3内设置有第二输水软管22,伸缩件3底部固定连接有第一连接柱17,第一连接柱17底部固定连接有终端锚2,终端锚2内设置有第一输水软管21,终端锚2底部固定连接有刚性锥尖1,穿透锚4、伸缩件3与终端锚2均为硅胶材质腔体,第一输水软管21、第二输水软管22与第三输水软管23一端均固定连接有
输水管6,且三个输水管6外表面固设有软管束5,输水管6另一端固定连接有密闭瓶7,刚性锥尖1底部可拆卸安装有套壳19,套壳19顶部开设有凹槽20,刚性锥尖1与凹槽20插置连接,密闭瓶7顶部一侧固定连接有转换气管16,转换气管16一侧固定连接有三位五通电磁阀8,三位五通电磁阀8顶部固定连接有气动管接头9,三位五通电磁阀8底部固定连接有分流气管15,且三个分流气管 15远离三位五通电磁阀8的一端固定连接有同一个分流阀14,分流阀14一侧通过出气管11固定连接有空气压缩机10,空气压缩机10一侧固定连接有进气口 12,进气口12与出气管11固定连接,空气压缩机10一侧开设有出气口13,输水管6外表面固设有固线器26,固线器26一侧固定连接有支架25,支架25一侧设置有实验桶24,刚性锥尖1插入实验桶24内,通过水气转换装置用充水代替充气,通过水气转换装置用充水代替充气,通过第一输水软管21、第二输水软管22与第三输水软管23控制穿透锚4、伸缩件3和终端锚2,通过穿透锚4、伸缩件3和终端锚2各自的形变收缩舒张,能够一定程度上克服了高含水率土壤环境下,机器人向下掘进过程中硅胶腔体所受浮力的影响,提高了掘进深度,适用环境更为广泛。
27.工作原理:使用时,工作人员立好支架25并放置好试验桶,将软管束5穿过安装在钢架上的若干固线器26,使用扎带或橡皮筋将软管束5固定在钢架上,使机器人身体部分悬空并与试验桶底保持一定距离。
28.将拌匀的高岭土缓缓倒入试验桶直至高岭土没过穿透锚4,剪开扎带或橡皮筋释放机器人,机器人埋设完毕。
29.通过arduino ide程序发送指令给三个中封式三位五通三位五通电磁阀8,分别控制三段硅胶腔体按照步态循环进行运动,步骤如下:
30.(1)穿透锚4相连的三位五通电磁阀8打开,穿透锚4分流气管15通气,经由水气转换,穿透锚4充水膨胀,水压达到预设值,关闭三位五通电磁阀8,穿透锚4压力保持恒定,形状维持不变,进行锚固。
31.(2)伸缩件3相连的三位五通电磁阀8打开,伸缩件3充水伸长,水压达预设值关闭三位五通电磁阀8a。伸缩结构压力恒定,长度维持不变。
32.(3)穿透锚4相连的三位五通电磁阀8打开,终端锚2充水膨胀,水压达预设值关闭三位五通电磁阀8,终端锚2压力恒定,形状维持不变。
33.(4)穿透锚4相连的三位五通电磁阀8打开,分流气管15与外界大气压联通,在压力作用下,水从穿透锚4压回密闭瓶7,穿透锚4失水回缩,水压回到初始值,关闭穿透锚4相连的三位五通电磁阀8,穿透锚4回到初始形状,卸去锚固力,准备随伸缩件3运动。
34.(5)伸缩件3相连的三位五通电磁阀8打开,伸缩件3失水缩短,水压回到初始值关闭三位五通电磁阀8,伸缩件3回到初始长度,带动穿透锚4向下运动。
35.(6)穿透锚4相连的三位五通电磁阀8打开,穿透锚4充水膨胀,水压达预设值关闭三位五通电磁阀8,穿透锚4压力保持恒定,形状维持不变,在位移后在新的位置进行锚固。
36.(7)终端锚2相连的三位五通电磁阀8打开,终端锚2失水回缩,水压回到初始值关闭三位五通电磁阀8,终端锚2回到初始形状,卸去锚固力,准备进行下一个循环。
37.在机器人运动过程中,可通过在钢管上留标记物的方式读取机器人掘进的路程、后退、步幅等参数,进行后续的数据分析。
38.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不
局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1