一种具有转向功能的盾构机刀盘检修载具的制作方法
1.本实用新型涉及盾构机检修领域,特别涉及一种具有转向功能的盾构机刀盘检修载具。
背景技术:
2.盾构机是一种使用盾构法的隧道掘进机,广泛的利用于铁路、公路、地下空间的扩展。由于盾构机工作过程中环境复杂,经常会遇到岩石等特殊材质,导致盾构机的刀具受损,因此,需要对盾构机刀盘定期检修。目前检修的方式有两种,第一种是人工检修,即工作人员需要进入负压仓进行检测,这种方式不但危险,而且效率低下。第二种是采用检修机器人的方式进行,目前检修机器人体积较大,需要对负压仓开设较大的出入口方能实现检修机器人的进出,这导致盾刀盘的强度和工作容易受到影响。
3.在专利cn216974840u中提供了一种检修机器人,可以通过缩小自身体积减小出入口的大小,但是该机器人在只能通过两个伸缩部的行程差进行转动,转动幅度较小,当需要较大转向时,需要很长的行进距离才能实现。
技术实现要素:
4.本实用新型提供了一种具有转向功能的盾构机刀盘检修载具,其目的是为了解决现有的检修载具在短距离路径中转向幅度较小的问题。
5.为了达到上述目的,本实用新型的实施例提供了一种具有转向功能的盾构机刀盘检修载具,包括:
6.第一走行部和第二走行部,所述第一走行部和第二走行的上端分别连接有固定板和转动板,所述固定板位于第一走行部的上方,所述转动板位于第二走行部的上方,所述固定板和转动板部分重合且在重合部分设置有回转轴承,所述固定板用于安置检修设备;
7.转向气缸,一端与固定板转动连接,另一端与转动板转动连接,所述转向气缸推动所述转动板绕回转轴承转动以实现转向。
8.优选的,具有转向功能的盾构机刀盘检修载具还包括推动部,所述推动部的两端分别通过鱼眼轴承与第一走行部和第二走行部连接。
9.优选的,具有转向功能的盾构机刀盘检修载具还包括控制系统,所述控制系统信号连接有第一电永磁体组和第二电永磁体组,所述第一电永磁体组和第二电永磁体组分别设置在第一走行部内和第二走行部内部,所述控制系统控制第一永磁体组和第二永磁体组充、退磁。
10.优选的,所述第一走行部和第二走行部的底部设置有用于容纳导轮结构的凹槽,所述凹槽内设置有弹性垫板,所述导轮结构通过弹性垫板安装在所述凹槽内。
11.优选的,所述导轮结构包括导轮支架和设置在导轮支架上的导轮,所述导轮支架与所述弹性垫板连接。
12.优选的,所述第二走行部上还设置有导向组件,所述导向组件为箱式直线轴承,所
述箱式直线轴承的箱体与所述第二走行部的上表面连接,所述箱式直线轴承的导杆与所述转动板连接。
13.优选的,所述控制系统还与所述推动部和转向气缸连接。
14.优选的,所述推动部为yh8-520式电推杆。
15.本实用新型的上述方案有如下的有益效果:
16.在本技术中,通过采用转向气缸推动第二走行部相对第一走行部发生转动,使得两个走行部之间可以转动较大的幅度,能够在短距离的运动过程中实现较大的转向,更加有利于在狭小的空间内进行转向和行进。
附图说明
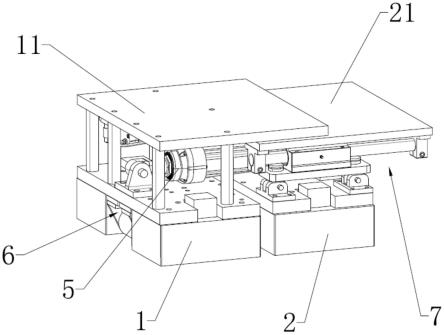
17.图1是本实用新型的结构示意图;
18.图2是本技术的转向原理图;
19.图3是本技术的走行原理图;
20.图4是本技术的工作示意图。
21.【附图标记说明】
22.1-第一走行部、11-固定板、12-支撑柱、2-第二走行部、21-转动板、3-回转轴承、4-转向气缸、5-推动部、51-鱼眼轴承、6-导轮结构、61-导轮支架、62-导轮、63-弹性垫板、7-导向组件、71-箱体、72-导杆、73-导杆座。
23.a-检修设备、b-工作面、c-刀盘。
具体实施方式
24.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
25.如图1-4所示,本实用新型的实施例提供了一种具有转向功能的盾构机刀盘检修载具,包括第一走行部1和第二走行部2,在第一走行部1的上方设置有固定板11,在第二走行部2的上方设置有转动板21,固定板11与第一走行部1之间通过支撑柱12连接和支撑。固定板11和转动板21首尾靠近且固定板11和转动板21在相邻的一侧部分重合,在重合部分处设置有回转轴承3,固定板11和转动板21以回转轴承3为转动中心进行转动。固定板11上用于安置检修设备,检修设备可以通过现有方式安装在固定板11上,如焊接、螺接。
26.在第一走行部1和第二走行部2之间还设置有转向气缸4,转向气缸4一端与固定板11转动连接,另一端与转动板21转动连接,转向气缸4推动转动板21绕回转轴承3转动以实现转向功能。
27.具体来说,固定板11和转动板21均为矩形板,转向气缸4设置在固定板11和转动板21的中心线上,转向气缸4与固定板11的转动连接处与转向气缸4与转动板21的转动连接处处于同一侧,均位于固定板11中心线的任一一侧。
28.优选的,转向气缸4与转动板21连接的一端通过鱼眼轴承51连接。
29.在本技术中,利用转向气缸4和回转轴承3进行配合,使得本技术可以进行较大幅度的转向。在本技术背景技术提及的检修机器人,利用两个伸缩部的差值进行转向,并不能产生较大的转动,原因在于伸缩部通过伸缩安装座设置在走行部上,当两个伸缩部的差值
过大时,会受到伸缩安装座的限制,导致无法进行较大的转向。
30.参照图2,图2是为固定板11和转动板21在仰视状态下的示意图。本技术中通过转向气缸4分别与固定板11和转动板21转动连接,通过转向气缸4的伸缩实现推动转动板21转向,在本技术中,并未采用类似对比文件中的伸缩部差值的方式,不受伸缩安装座的限制,可以在较短的路程中实现大幅度转向,方便在工作面上进行行进和转向。
31.进一步的,为了实现第一走行部1和第二走行部2的运动,本技术还包括推动部5,推动部5的两端分别与第一走行部1和第二走行部2进行连接。优选的,推动部5与第一走行部1和第二走行部2分别通过鱼眼轴承51进行连接。
32.进一步的,在第一走行部1和第二走行部2内部对应的设置有第一电永磁体组和第二电永磁体组,第一电永磁体组和第二电永磁体组连接有控制系统(图中未示出),控制系统为第一电永磁体组和第二点永磁体组供电或断电,当电永磁体组断电时电永磁体组磁力最大,处于充磁状态,当电永磁体组通电时,通过控制电流的大小使得磁性削减,处于退磁状态。控制系统还与转向气缸4和推动部5信号连接。
33.本技术的走行通过如下方式进行:
34.首先,设置检修载具行走的工作面,该工作面与刀盘平行,通常是利用负压仓壁作为工作面。本技术吸附在工作面上,固定板11上安装如摄像头等检修设备,此时第一电永磁体组和第二电永磁体组未供电,两者依靠自身的磁力吸附在工作面上。当第二电永磁体组退磁时,第二电永磁体组磁吸附力减小,与工作面的摩擦力减小,此时推动部5在控制系统的作用下伸长,第二走行部2距离第一走行部1的距离变大;随后第二电永磁体组充磁,第一电永磁体组退磁,第一走行部1与工作面的摩擦力减小,推动部5在控制系统的作用下缩短,将第一走行部1拉向第二走行部2,如此往复循环,实现本技术的直线行走。
35.当需要进行转动时,第二电永磁体组退磁,与工作面的摩擦力减小,此时转向气缸4在控制系统的作用下缩短,拉动转动板21绕回转支承转动,与此同时,推动部5也在控制系统的作用下伸长;随后,第二电永磁体组充磁,第一电永磁体组退磁,转向气缸4保持伸缩长度不便,推动部5将第一走行部1拉向第二走行部2,实现转向。
36.由于本技术中推动部5与第一走行部1和第二走行部2通过鱼眼轴承51连接,使得推动部5与第一走行部1和/或第二走行部2可以发生一定角度的转动,不会限制回转动板21相对回转轴承3的转动。
37.通过前述的描述可知,第一走行部1和第二走行部2通过电永磁体组的充放磁的方式减小和增大与工作面的摩擦力,进而通过拉动其中一个走行部的方式实现运动,被拉动的走行部与工作面的摩擦会对工作面的表面造成刮伤,因此本技术还设置有导轮结构6。
38.具体的,第一走行部1和第二走行部2在与工作面接触的面设置有凹槽,导轮结构6设置在凹槽内,导轮结构6包括导轮支架61和导轮62,导轮支架61上设置有弹性垫板63,导轮支架61通过弹性垫板63设置在凹槽内,导轮62设置在导轮支架61上。当第一走行部1充磁时,磁力较大,此时,工作面—导轮结构6—弹性垫板63—第一走行部1受力较大,使得弹性垫板63被挤压,导轮结构6缩入凹槽内,不影响第一走行部1吸附在工作面上。当第一走行部1退磁时,磁力减小,弹性垫板63恢复原状,导轮结构6部分伸出凹槽,减小第一走行部1与工作面之间的摩擦力,将原本的静摩擦变为静摩擦和滚动摩擦的混合模式,有利于减小走行部对工作面的刮蹭。
39.在一实施例中,在第二走行部2上还设置有导向组件7,导向组件7为箱式直线轴承,箱式直线轴承的箱体71与第二走行部2的上表面固定连接,箱式直线轴承的导杆72与转动板21连接。
40.优选的,导杆72通过导杆座73的方式与转动板21连接。
41.优选的,推动部5为yh8-520式电推杆。
42.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1