双活塞旋转导向系统的制作方法
双活塞旋转导向系统
1.相关申请的交叉引用
2.本技术要求于2021年3月2日提交的第63/207,487号美国临时专利申请的权益和优先权,该美国临时专利申请通过引用并入本文。
3.背景
4.在油气井的钻井和生产过程中,旋转导向系统(rotary steerable system)被用于控制和调节钻井方向。常规的旋转导向系统在长度上远远超过150英寸,并且包括三组或更多组延伸活塞。这些大型系统需要经常维护。常规的旋转导向系统的长的长度给维护(包括将系统从钻井位置运输到车间(shop))带来了挑战。
5.附图简述
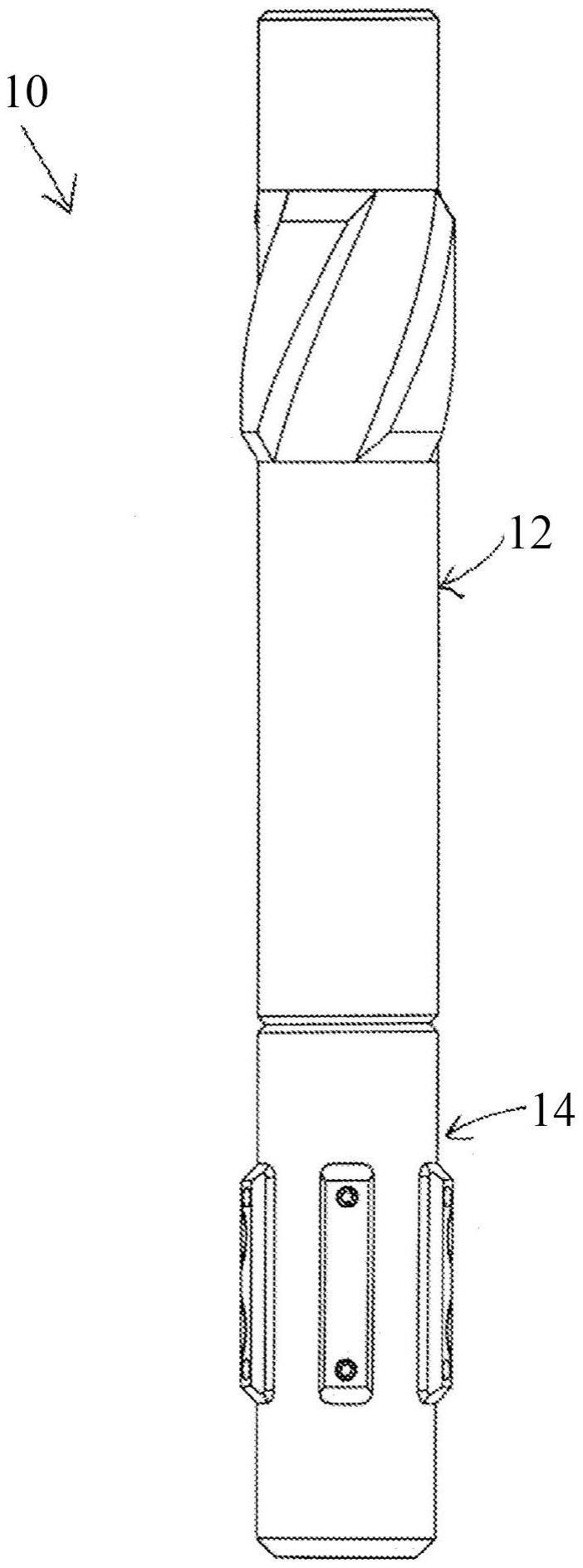
6.图1是本发明的旋转导向系统的侧视图。
7.图2是旋转导向系统的截面视图。
8.图3是旋转导向系统的控制套筒(control sleeve)和导向部分的截面视图。
9.图4是被构造成配合在控制套筒内的控制插入件(insert)的局部分解视图。
10.图5是控制套筒内的控制插入件的上控制单元的局部截面视图。
11.图6是控制插入件的下控制单元的分解视图。
12.图7是控制插入件的下控制单元的截面视图。
13.图8是导向部分的截面视图。
14.图9是沿相比于图8垂直的平面截取的导向部分的截面视图。
15.图10是控制部分和导向部分的下部的截面视图。
16.图11是旋转导向系统的阀定子的顶视图。
17.图12是沿图11中的线12-12截取的旋转导向系统的阀定子的截面视图。
18.图13是旋转导向系统的阀定子的底视图。
19.图14是旋转导向系统的阀定子的替代实施例的顶视图。
20.图15是沿图14中的线15-15截取的旋转导向系统的阀定子的替代实施例的截面视图。
21.图16是旋转导向系统的阀定子的替代实施例的底视图。
22.图17是旋转导向系统的阀转子的顶视图。
23.图18是沿图17中的线18-18截取的旋转导向系统的阀转子的截面视图。
24.图19是旋转导向系统的阀转子的底视图。
25.图20是包括阀转子和阀定子的阀组件的顶视图,其中阀转子处于第一位置。
26.图21是沿图20中的线21-21截取的其中阀转子处于第一位置的阀组件的截面视图。
27.图22是其中阀转子处于第二位置的阀组件的顶视图。
28.图23是阀组件的示意图,其中阀转子处于在其相对于阀定子旋转时的一系列位置中。
29.图24是处于默认位置的导向部分的侧视图。
30.图25是沿图24中的线25-25截取的处于默认位置的导向部分的截面视图。
31.图26是处于第一延伸位置的导向部分的侧视图。
32.图27是沿图26中的线27-27截取的处于第一延伸位置的导向部分的截面视图。
33.图28是处于中性位置(neutral position)的导向部分的侧视图。
34.图29是沿图28中的线29-29截取的处于中性位置的导向部分的截面视图。
35.图30是处于第二延伸位置的导向部分的侧视图。
36.图31是沿图30中的线31-31截取的处于第二延伸位置的导向部分的截面视图。
37.图32是导向部分的替代实施例的侧视图。
38.图33是导向部分的替代实施例的截面视图。
39.图34是沿图32中的线34-34截取的导向部分的替代实施例的截面视图。
40.图35是沿图32中的线35-35截取的导向部分的替代实施例的截面视图。
41.图36是连接在柔性轴(flex shaft)和钻头(drill bit)之间的旋转导向系统的侧视图。
42.图37是连接在柔性轴和钻头之间的旋转导向系统的另一侧视图。
43.选定实施例的详细描述
44.本文公开了一种包括导向部分(steering section)的旋转导向系统。该导向部分包括至少一个活塞。在一些实施例中,导向部分在每个横向横截面平面中仅包括两个活塞。第一活塞的中心点与第二活塞的中心点相隔大于120度的角度。
45.旋转导向系统还包括阀组件,该阀组件被构造成将流经旋转导向系统的钻井流体的一部分引导到分配流动通道中,从而激活活塞中的一个并使该活塞沿径向向外的方向延伸。每个分配流动通道的直径与导向部分直径之比至少为0.07。分配流动通道被包含在导向部分的中心区域内。中心区域的直径与导向部分直径之比为0.5或更小。每组活塞的激活持续时间为阀转子旋转约180度。每个活塞的冲程长度(stroke length)与导向部分的直径之比大于0.06。如本文所用,“导向部分的直径”和“导向部分直径”都是指组装好的导向部分的任何部分的最小外径(即,组装好的导向部分的最小部分的外径)。例如,在一些实施例中,导向部分直径可以是导向壳体22的外径。
46.在一些实施例中,旋转导向系统还包括控制部分。控制部分和导向部分的组合长度小于150英寸,优选地小于80英寸。
47.图1至图37示出了本文公开的旋转导向系统的实施例,其中在权利要求范围内的许多其他实施例对于查阅本公开后的技术人员来说是十分明显的。
48.参照图1至图3,旋转导向系统10包括控制部分12和导向部分14,控制部分12和导向部分14均具有大致圆柱形的形状。控制部分12包括电子部件、传感器和致动器,以用于确定所需的钻孔方向或工具面以及用于定向导向部分。
49.控制部分12包括控制套筒16和被设置在控制套筒16的内孔20内的控制插入件18。控制插入件18被构造成用于相对于控制套筒12旋转。在一个实施例中,控制插入件18被构造成相对于周围的地下地层保持静止,使得控制套筒16围绕控制插入件18旋转。换句话说,控制插入件18可以被构造成保持地球同步(geo-stationary)。控制套筒16的下端被固定到导向部分14的导向壳体22的上端。以这种方式,控制套筒16旋转地固定到导向壳体22。如本文所用,“旋转地固定”是指固定在一起使得两个部件一起旋转(即,在正常操作条件下,两
个部件之间没有相对旋转)。
50.控制插入件18的下端包括阀转子24,该阀转子24与被固定到导向壳体22的阀定子26协作。当控制插入件18相对于控制套筒16和导向壳体22旋转时,阀转子24相对于阀定子26旋转。
51.现在参照图2和图4至图6,控制插入件18可以包括上控制单元28、电子单元30和下控制单元32。控制插入件18还可以包括被固定到上控制单元28的引导件34和被固定到下控制单元32的引导件36。引导件34和36可以旋转地固定到控制套筒16,而上控制单元28和下控制单元32分别在引导件34和引导件36内旋转。控制插入件18还可以包括旋转地固定到上控制单元28的上叶轮38和旋转地固定到下控制单元32的下叶轮40。上叶轮38和下叶轮40可以被设定尺寸和构造成使得叶轮38的外端和叶轮40的外端非常接近控制套筒16的内孔20的表面。引导件34和36以及叶轮38和40可以在控制插入件18位于控制套筒16的内孔20中时稳定控制插入件18在控制套筒16的内孔20内的位置。
52.再次参照图2,上控制单元28可以包括磁力制动器41,磁力制动器41用作在与控制套筒16和导向壳体22的旋转方向相反的方向上施加旋转扭矩的致动器。以这种方式,磁力制动组件调节控制插入件18相对于控制套筒16的旋转速率。当钻井流体流经控制套筒16的内孔20时,钻井流体流经叶轮38中的空间,从而在叶轮38和上控制单元28上施加旋转力。在一个实施例中,上控制单元28还包括发电机构。磁力制动组件可以是旋转导向系统10中唯一的致动器。
53.参照图4和图5,上控制单元28还可以包括上过滤器44。在一个实施例中,上过滤器44可以由带有肩部(shoulder)的环形成,使得环的堆叠产生用于过滤的小间隙。当钻井流体流经控制套筒16的内孔20时,少量钻井流体可以流经上过滤器44并流经包围天线42和磁力制动器41的中间空间43a、43b、43c和43d。上过滤器44从钻井流体中去除较大的颗粒,以允许少量清洁流体在中间空间43a-43d中流动。仅允许清洁流体在中间空间43a-43d中流动防止上控制单元28的两个部分堵塞(seize up)和/或防止在上控制单元28的两个部分之间产生额外的阻力。大部分钻井流体围绕过滤器44的外表面流动并流经叶轮38中的空间。
54.电子单元30可以包括传感器。例如,电子单元30可以包括用于感测南北方向的磁力计、用于感测倾斜度的加速度计和用于感测控制单元相对于周围地下地层的旋转的陀螺仪。控制插入件18可以被构造成基于由电子单元30中的传感器进行的测量来调节上控制单元28中的磁力制动组件。在一些实施例中,旋转导向系统10不包括电池,且仅包括少量存储器(例如,仅闪存)。在这些实施例中,电子单元30可以包括天线42,以用于将测量数据和其他数据传输到被固定在旋转导向系统10上方的随钻测量(“mwd”,measurement-while-drilling)单元,并且mwd单元可以将接收到的数据存储在存储器中。电子单元30的天线42可以由电磁天线形成。
55.参照图6和图7,下控制单元32可以包括具有流动通道46的壳体45。流动通道46被构造成允许控制套筒16和壳体45之间的环形空间中的钻井流体流到壳体45内的内部空间48中。下控制单元32还可以包括下过滤器49,下过滤器49被构造成包围和覆盖流动通道46,以便在钻井流体流经流动通道46并进入内部空间48时过滤钻井流体。在一个实施例中,下过滤器49可以由带有肩部的环形成,使得环的堆叠产生用于过滤的小间隙。下控制单元32还可以包括弹簧50,弹簧50被设置在内部空间48内,并被构造成在朝向阀定子26和导向部
分14的方向上偏置阀转子24。例如,弹簧50的上端可以接合壳体45的横向表面52,而弹簧50的下端接合间隔件54的上端,以在被固定到间隔件54的下端的阀转子24上施加向下的力。当钻井流体流经控制套筒16和壳体45之间的环形空间时,一部分钻井流体可以流经流动通道46、进入内部空间48中、并流经阀转子24的转子端口56。流经环形空间的钻井流体的剩余部分可以流经壳体45外部的叶轮40中的空间。
56.现在参照图8和图9,导向部分14包括平行的主流动通道和分配流动通道。导向壳体22包括从上内孔68延伸到下内孔70的两个主流动通道66。导向壳体22还包括两个分配流动通道72,每个分配流动通道72从阀定子26的定子端口73延伸到一个或更多个供给槽道(feed channels)74。导向部分14还包括两个活塞组件76,每个活塞组件76至少部分地被固定在导向壳体22的外表面中的接纳部(receptacle)78内。每个活塞组件76包括一个或更多个活塞80,每个活塞80被设置在活塞套筒85内,所有的活塞套筒都被设置在活塞夹具81内,活塞夹具81被构造成固定在导向壳体22中的活塞接纳部82内。活塞80被构造成在活塞接纳部82内沿径向方向滑动。每个供给槽道74从分配流动通道72延伸到活塞接纳部82。旋转导向系统10的导向部分14可以在每个横向横截面平面中包括不超过两个活塞,其中活塞的中心点相隔大于120度的角度。导向部分14可以包括不超过两组活塞。
57.导向部分14还可以包括间隔件84,每个间隔件84至少部分地被设置在导向壳体22的外表面中的间隔件接纳部86内。在一个实施例中,使用螺栓或螺钉将间隔件84固定到导向壳体22。如本文所用,“活塞”是指被构造成当被激活时从其固定到的工具或包含其的工具沿径向方向延伸的任何结构。例如,“活塞”包括衬垫、楔形装置和凸轮装置。
58.参照图10,当钻井流体流经控制套筒16和控制插入件18之间的环形空间时,一部分钻井流体可以流经流动通道46并流动到壳体45的内部空间48中。内部空间48内的钻井流体可以流经阀转子24的转子端口56和阀定子26的与转子端口56对准的定子端口73。当阀转子24相对于阀定子26旋转时,转子端口56随时间依次与每一个定子端口73对准。因此,流经转子端口56的钻井流体将随时间依次流经每一个定子端口73。流经一个定子端口73的钻井流体流经连接的分配流动通道72、流经每个连接的供给槽道74、并流动到连接的活塞接纳部82中,以便施加力并使活塞80沿径向向外的方向移动。在一些实施例中,且为了提供当活塞从打开位置缩回时的排气路径,钻井流体可以流经活塞80和活塞接纳部82之间的泄漏槽道90,或者在另一个实施例中,钻井流体可以在活塞和引导套筒之间泄漏、通过活塞和引导套筒之间的直径空间泄漏、或者通过形成在套筒中或活塞中的将活塞接纳部82连接到井眼的槽道泄漏。在另一个实施例中,泄漏槽道可以穿过活塞主体定位,以将活塞接纳部82连接到井眼。在另一个实施例中,泄漏槽道可以位于引导套筒和导向主体之间。
59.图11至图13示出了阀定子26的一个实施例,该阀定子26包括被定位在阀定子26的相对侧上的两个定子端口73。换句话说,一个定子端口73的外边界的中心点相对于第二定子端口73的外边界的中心点成180度。在该实施例中,每个定子端口73的形状横跨阀定子26的厚度而变化。例如,每个定子端口73可以由阀定子26的第一侧94上的楔形开口92限定,并且由阀定子26的第二侧98上的圆形开口96限定。第一侧94被构造成接合阀转子24,并且第二侧96被构造成接合分配流动通道72。楔形开口92的侧边可以由与转子端口56的侧边界对齐的直线形成以提供对活塞的较急剧的(sharper)致动。而圆形开口96被构造成与分配流动通道72对准。定子端口73的形状横跨阀定子26的厚度的转变(transition)缩短了在阀组
件和活塞80之间所需的转变流动管线的长度。在其他实施例中,每个定子端口73可以由阀定子26的第一侧94上的楔形开口92限定,并且由阀定子26的第二侧98上的多边形开口限定。在另外的其他实施例中,定子端口73可以横跨阀定子26的厚度具有相同的形状。
60.图14至图16示出了阀定子26a的替代实施例。在该实施例中,每个定子端口73a由阀定子26a的第一侧94a上的楔形开口92a限定。每个定子端口73a由阀定子26a的第二侧98a上的多边形开口99限定。
61.图17至图19示出了阀转子24的一个实施例,该阀转子24仅包括一个转子端口56。在该实施例中,转子端口56的形状横跨阀转子24的厚度而变化。例如,转子端口56可以由阀转子24的第一侧104上的内边界102、外边界106以及侧边界108和110限定。侧边界108和110在第一侧104上将内边界102和外边界106互连。第一侧104的中心点被定位在内边界102和外边界106之间。换句话说,转子端口56包括第一侧104的中心点。转子端口56的内边界102在阀转子24的整个厚度上保持恒定。在阀转子24的第二侧112上,转子端口56可以由外边界106、内边界114以及侧边界116和118限定。侧边界116和118在第二侧112上将内边界102和外边界106互连。内边界114被定位在外边界106和第二侧112的中心点之间。换句话说,第二侧112的中心点不被包括在转子端口56内。阀转子24可以分别在内边界102、侧边界108和侧边界110之间的过渡部以及内边界114、侧边界116和侧边界118之间的过渡部包括倾斜表面120。
62.转子端口56的第一侧104的侧边界116和118可以具有与定子端口73的楔形开口92的侧边界相同的形状。例如,侧边界116和118中的每一个以及楔形开口92的每个侧边界可以由沿径向方向延伸的直线形成。
63.现在参照图20至图22,阀组件124可以包括阀转子24和阀定子26,其中阀转子24相对于阀定子26旋转。在该实施例中,转子端口56的外边界106与定子端口73的楔形开口92的外边界对齐,并且转子端口56的内边界114与定子端口73的楔形开口92的内边界对齐。在图20和图21所示的第一位置,转子端口56与单个定子端口73的所有楔形开口92对准。在该第一位置,第一定子端口73a“打开”,而第二定子端口73b(在该视图中未示出)“关闭”。当阀转子24旋转时,转子端口56的侧边界116和118越过定子端口73的楔形开口92的侧边界,从而交替地打开和关闭定子端口73a和73b。侧边界116与侧边界118之间的角间距(angular separation)和每个楔形开口92的两个侧边界之间的角间距共同限定每个定子端口73打开的持续时间(即,每个定子端口73的激活持续时间)。这些角间距还限定两个定子端口73是否在单个时间点部分打开,且如果是,则限定两个定子端口73同时部分打开的持续时间。在某些实施例中,转子端口56的打开角度(即,转子端口56内的侧边界116和118之间的角距离)为至少110度。如本文所用,“打开角度”是开口内的两个径向边界之间的旋转距离。在一些实施例中,两个楔形开口92的侧边界相隔至少110度或在110度和170度之间,或这些范围内的任何子范围。在某些实施例中,两个楔形开口92的侧边界相隔至少125度。在另外的实施例中,两个楔形开口92的侧边界相隔在140度和170度之间的角度。在图22所示的第二位置,转子端口56与定子端口73a的一部分、定子端口73b的一部分对准。
64.图23示出了阀组件124,其中随着时间的推移,阀转子24相对于阀定子26处于不同的顺序位置。在该实施例中,阀转子24沿逆时针方向旋转。在其他实施例中,阀转子24沿顺时针方向旋转。在另外的其他实施例中,当阀定子26与导向单元14和控制套筒16一起沿顺
时针方向旋转时,阀转子24被保持在地球同步位置。图23(a)示出了图20和图21中所示的第一位置,在该第一位置,转子端口56与第一定子端口73a对准,使得第一定子端口73a完全打开,而第二定子端口73b关闭。如图23(b)所示,当转子端口56的侧边界116与第一定子端口73a的楔形开口的侧边界对齐时,第一定子端口73a始终保持完全打开。
65.如图23(c)所示,阀转子24的进一步旋转导致转子端口56的侧边界116移动经过第一定子端口73a,从而减小第一定子端口73a的开口横截面面积,并降低经过第一定子端口73a的流体流速。如图23(c)所示,当转子端口56的侧边界118与第二定子端口73b的楔形开口的第一侧边界对齐时,第一定子端口73a部分打开,而第二定子端口73b始终关闭。如图23(d)所示,阀转子24的进一步旋转导致转子端口56的侧边界118移动越过第二定子端口73b的第一侧边界,从而将第一定子端口73a和第二定子端口73b都置于部分打开位置。在该实施例中,如图23(d)所示,阀组件被构造成具有同时部分打开的第一定子端口73a和第二定子端口73b。阀组件保持在该同时部分打开位置,直到侧边界116与第一定子端口73a的第二侧边界对齐,以将第一定子端口73a置于关闭位置,如图23(e)所示。随着阀转子24进一步旋转并且转子端口56的侧边界118移动经过第二定子端口73b,第二定子端口73b进一步打开,并且经过第二定子端口73b的流体流速增加。在此期间,第一定子端口73a关闭,而第二定子端口73b部分打开。
66.如图23(f)所示,当转子端口56的侧边界118与第二定子端口73b的第二侧边界对齐时,第二定子端口73b被置于完全打开位置。如图23(g)所示,当转子端口56的侧边界116与第二定子端口73b的第一侧边界对齐时,第二定子端口73b保持在完全打开位置。
67.如图23(h)所示,阀转子24的进一步旋转导致转子端口56的侧边界116移动经过第二定子端口73b,从而减小第二定子端口73b的开口横截面面积并降低经过第二定子端口73b的流体流速。如图23(h)所示,当转子端口56的侧边界118与第一定子端口73a的第一侧边界对齐时,第一定子端口73a关闭,而第二定子端口73b始终部分打开。如图23(i)所示,阀转子24的进一步旋转导致转子端口56的侧边界118移动越过第一定子端口73a的第一侧边界,从而将定子端口73a和73b都置于部分打开位置。如图23(j)所示,阀组件保持在该同时部分打开位置,直到转子端口56的侧边界116与第二定子端口73b的第二侧边界对齐,以将第二定子端口73b置于关闭位置。随着阀转子24继续旋转并且转子端口50的侧边界118移动经过第一定子端口73a,第一定子端口73a进一步被打开,并且经过第一定子端口73a的流体流速增加。在此期间,第一定子端口73a部分打开,而第二定子端口73b被关闭。如图23(k)所示,当转子端口56的侧边界118与第一定子端口73a的第二侧边界对齐时,第一定子端口73a置于完全打开位置。图23(l)再次示出了处于第一位置的阀组件,在该第一位置,第一定子端口73a完全打开,而第二定子端口73b关闭。表1列出了图23的每个视图中定子端口的位置。
68.附图第一定子端口73a的位置第二定子端口73b的位置图23(a)完全打开关闭图23(b)完全打开关闭图23(c)部分打开关闭图23(d)部分打开部分打开图23(e)关闭部分打开
图23(f)关闭完全打开图23(g)关闭完全打开图23(h)关闭部分打开图23(i)部分打开部分打开图23(j)部分打开关闭图23(k)完全打开关闭图23(l)完全打开关闭
69.表1
70.每个定子端口73a、73b的理论激活持续时间(即,对于阀转子24的旋转,该定子端口73a或73b完全打开或部分打开)可以大于120度,优选地大于150度,并且最优选地为约180度。图23所示的实施例提供了约180度的理论激活持续时间。从转子端口56的侧边界118经过第二定子端口73b的第一侧边界时的时间(紧接在图23(c)所示的位置之后)直到侧边界116经过第二定子端口73b的第二侧边界时的时间(紧接在图23(j)之前),第二定子端口73b部分打开或完全打开。
71.图24和图25示出了处于默认位置的导向部分14,在该默认位置,活塞80处于缩回位置。旋转导向系统10的该实施例包括两个活塞80,其中两个活塞80的中心点相隔约180度。因为导向部分14在每个横向横截面平面中仅包括两个活塞80,所以分配流动通道72a和72b可以被定位在导向壳体22的中心区域内。在一些实施例中,主流动通道66可以从中心区域径向向外延伸。分配流动通道72a、72b和主流动通道66可以被定位在活塞接纳部82之间。可选地,主流动通道66也可以延伸超过活塞接纳部82之间的空间。分配流动通道72a、72b在与活塞80相同的横向横截面平面内的中心区域中的位置消除了对用于重新布置经过导向单元的长度的流动管线的卡盘(spider)的需要(即,分配流动通道保持在从阀组件124到供给槽道74和活塞80的中心区域中)。
72.在某些实施例中,中心区域可以由圆形路径限定,该圆形路径包括每个活塞接纳部82的内部边界的中心,并且以导向单元14的中心为中心。在其他实施例中,该中心区域可以由包围导向单元14的中心的中心直径来限定。中心直径可以在1.5英寸至3.0英寸的范围内,优选地在约1.75英寸至约2.5英寸的范围内,或这些范围中的任何子范围内。在某些实施例中,在直径小于或等于5.25英寸的导向单元中,中心直径可以为约1.75英寸,在直径小于或等于6.75英寸的导向单元中,中心直径可以为约2英寸,并且在直径小于或等于9英寸的导向单元中,中心直径可以为约2.5英寸。中心直径与导向部分直径之比可以为0.5或更小、0.4或更小、优选地0.33或更小、更优选地0.3或更小。
73.在图25所示的实施例中,导向部分14包括如图所示在导向部分14的中心点处相交的轴线x和轴线y。分配流动通道72所在的中心区域由在中心点与从分配流动通道72中的一个上的最外点延伸的线d之间的分配距离90限定。线m由主流动通道66中的一个的内边界限定。线m与中心点间隔开主距离92。线p由活塞接纳部82中的一个的内边界限定。线p与中心点间隔开活塞距离94。在该实施例中,分配距离90大于主距离92,并且活塞距离94大于分配距离90。换句话说,每个主流动通道66的至少一部分比分配流动通道72的外边界更靠近导向部分的中心点。此外,每个主流动通道66的至少一部分比活塞接纳部82的内边界和活塞处于其缩回位置的位置更靠近导向部分的中心点。
74.本文公开的旋转导向系统包括相比于常规的旋转导向系统具有更大直径的分配流动通道72a、72b和具有更大直径的主流动通道66。这些流动管线的更大直径降低了流体流动速度,防止了水锤效应(water hammer effect),减少了侵蚀,并降低了压降,以保存能量。每个分配流动通道72a、72b的直径与导向部分14的直径之比可以为至少0.07。在某些实施例中,在直径为至少5.25英寸的导向部分14中,每个分配流动通道72a、72b的直径为约0.35英寸,在直径为至少6.75英寸的导向部分14中,每个分配流动通道72a、72b的直径为约0.5英寸,并且在直径为至少9英寸的导向部分14中,每个分配流动通道72a、72b的直径为约0.67英寸。
75.参照图10、图13和图20至图23,阀组件124(在图20至图23中示出)可以被定位在分配流动通道的上端处(在图10中示出),使得定子端口73的第二侧98上的圆形开口96(在图13中示出)与分配流动通道72对准。具体地,定子端口73a的圆形开口96与分配流动通道72a对准,并且定子端口73b的圆形开口96与分配流动通道72b对准。随着阀转子24相对于阀定子26旋转(如图23所示),定子端口73a和73b循环经过完全打开位置、部分打开位置和关闭位置,从而将流经下控制单元32的壳体45内的内部空间48的流体引导到第一分配流动通道72a、第二分配流动通道72b或其组合中。
76.图26和图27示出了当第一定子端口73a完全打开(如图23(a)和图23(b)所示)时处于第一延伸位置的导向组件14。在该位置,阀组件124将下控制单元32的内部空间48内的流体引导到第一分配流动通道72a中。具体地,已经进入下控制单元32的内部空间48的钻井流体流经阀转子24的转子端口56、流经第一定子端口73a、流经第一分配流动通道72a、流经供给槽道74并流动到第一活塞接纳部82a中。流动到第一活塞接纳部82a中的流体在第一活塞80a上施加径向向外的力,从而使第一活塞80a沿径向向外的方向移动。在该第一延伸位置,第一活塞80a可以接合正在穿过地下地层被钻入的井眼的壁,以便调节井眼被进一步钻入的方向。流经叶轮40中的空间的钻井流体流经主流动通道66,从而绕过(bypass)活塞组件76。
77.再次参照图27,活塞80a和80b各自可以具有长度lp和直径dp。在一些实施例中,每个活塞的长度与活塞的宽度之比在1和1.4之间,优选地在1.1和1.3之间,或者这些范围中的任何子范围。例如,每个活塞可以具有2.09英寸的长度和1.73英寸的直径,导致约1.2的比率。在另一示例中,活塞可以具有2.88英寸的长度和2.43英寸的直径,导致约1.2的比率。在又一示例中,活塞可以具有3.78英寸的长度和3.12英寸的直径,导致约1.2的比率。
78.此外,活塞80a和80b各自在被激活时从其默认位置延伸冲程长度s。活塞可具有大于0.06、优选地大于0.7或约0.08的冲程长度与活塞直径之比。例如,在具有至少5.25英寸的导向部分直径的实施例中,活塞的冲程长度可以在0.3英寸和0.5英寸之间。在另一个示例中,在具有至少6.75英寸的导向部分直径的实施例中,活塞的冲程长度可以在0.4英寸和0.6英寸之间。在又一示例中,在具有至少9英寸的导向部分直径的实施例中,活塞的冲程长度可以在0.6英寸和0.8英寸之间。
79.图28和图29示出了当第一定子端口73a和第二定子端口73b都部分打开时(如图23(d)和图23(i)所示)处于中性位置的导向组件14。在该位置,阀组件124将下控制单元32的内部空间48内的流体引导到第一分配流动通道72a和第二分配流动通道72b中。随着流经第一定子端口73a并最终流动到活塞接纳部82a中的流体流减小,由井眼的壁施加在活塞80a
上的力可以克服流动到活塞接纳部82a中的流体的向外的力,该向外的力可以迫使活塞80a沿径向向内的方向缩回到活塞接纳部82a中。接纳部82a中的多余流体通过排气端口排出。同时,流经第二定子端口73b的钻井流体流经第二分配流动通道72b、流经供给槽道74、并流动到活塞接纳部82b中。流动到活塞接纳部82b中的流体开始对第二活塞80b施加径向向外的力,从而导致第二活塞80b开始沿径向向外的方向移动。
80.图30和图31示出了当第二定子端口73b完全打开时(如图23(f)和图23(g)所示)处于第二延伸位置的导向组件14。在该位置,阀组件124将下控制单元32的内部空间48内的所有流体引导到第二分配流动通道72b中。随着流经第二定子端口73b并最终进入活塞接纳部82b的流体流增加,流体流在第二活塞80b上施加更大的径向向外的力,从而导致第二活塞80b在径向向外的方向上完全延伸。在该第二延伸位置,第二活塞80b可以接合井眼的壁,以便在相反的方向上调节钻井。在导向组件14的所有位置,流经叶轮40中的空间的钻井流体流经主流动通道66,从而绕过活塞组件76。
81.每个活塞80a、80b的理论激活持续时间(即,对于阀转子24的旋转,每个活塞80a、80b完全延伸或部分延伸)相当于上面讨论的每个定子端口73a、73b的理论激活持续时间。旋转导向系统10可以被构造成提供每个活塞80a、80b的理论激活持续时间,该持续时间大于120度,优选地大于150度,并且最优选地为约180度。由于致动定时延迟,每个活塞80a、80b的实际观察到的激活持续时间可能小于理论激活持续时间。如本文所用,“激活持续时间”是指阀转子24的旋转角度,在此期间,特定部件被流体流激活或接收流体流。与包括三活塞构造(three-piston configuration)的常规旋转导向系统相比,本文公开的旋转导向系统的双活塞构造(two-piston configuration)可以提供每个活塞更大的激活持续时间,这是由于阀的每次旋转中的较少过渡以及由于每个定子端口的侧边界之间的较大角间距所导致的。
82.导向部分14可以包括活塞组件内的任意数量的活塞。在图32至图35所示的该实施例中,导向部分14包括包含两个活塞80a的第一活塞组件76a和包含三个活塞80b的第二活塞组件76b。在所示实施例中,如图33所示,活塞80a可以相对于活塞80b沿着导向壳体22的轴向长度交错排列。换句话说,导向部分14在横向横截面平面(例如平面a-a)中仅包括一个活塞。在其他实施例中,偏移的活塞间隔等于导向部分直径的长度。可替代地,导向部分14可以仅包括一个活塞。
83.现在参照图36和图37,旋转导向系统10可以被固定在底部钻具组件(bottom hole assembly)中的柔性轴152和钻头154的下方。
84.本发明的包括导向部分和控制部分的旋转导向系统比常规的旋转导向系统明显更短。导向部分和控制部分的组合长度小于150英寸、小于125英寸、小于100英寸、小于80英寸、小于75英寸、小于70英寸、小于65英寸或这些范围中的任何子范围。在一个实施例中,旋转导向系统具有约5.25英寸的最小直径和约63英寸的组合长度。在另一个实施例中,旋转导向系统具有约6.75英寸的最小直径和约67英寸的组合长度。在又一个实施例中,旋转导向系统具有约9英寸的最小直径和约74英寸的组合长度。
85.可替代地,旋转导向系统的长度与导向部分直径之比小于16、小于14、小于11、小于10、小于9或这些范围中的任何子范围。如本文所用,“长度与导向部分直径之比”是指导向部分和控制部分的组合长度与导向部分或控制部分的最小外径(以英寸计)之比。例如,
但不作为限制,旋转导向系统可以具有小于或等于5.25英寸的直径,以及小于13、小于12或这些范围中的任何子范围内的长度与导向部分直径之比。可替代地,旋转导向系统可以具有小于或等于6.75英寸的直径,以及小于11、小于10或这些范围中的任何子范围内的长度与导向部分直径之比。在其他实施例中,旋转导向系统可以具有小于或等于9英寸的直径,以及小于9的长度与导向部分直径之比。
86.再次参照图36和图37,柔性轴152可以被固定在旋转导向系统10的上方,并且钻头154可以被固定在旋转导向系统10的下方。旋转导向系统10的缩短长度使柔性轴152定位得比常规的旋转导向系统更靠近钻头154,从而使旋转导向系统能够以较小的半径使钻头路径转向。例如,本文公开的旋转导向系统可以实现每100英尺14度的最大转向速率。在另一个实施例中,本文公开的旋转导向系统可以实现每100英尺18度的最大转向速率。在又一个实施例中,本文公开的旋转导向系统可以实现每100英尺24度的最大转向速率。实际上,当控制单元12和导向单元14作为一个整体偏转(即,被推动)并指向期望的方向时,缩短长度的旋转导向系统10表现为混合的推动钻头式/指向钻头式系统(push-the-bit/point-the-bit system)。最大转向速率值可能受到环境条件(包括井眼内的条件或地下地层的条件)的影响。
87.由于多个特征,实现了本发明的旋转导向系统的缩短长度。例如,如图10所示,下过滤器49和包括阀转子24和阀定子26的阀组件被结合到单个模块中。相比之下,常规的旋转导向系统包括用于过滤器和阀的独立模块。此外,没有电池减少了控制部分12的长度。另一个示例是在控制部分12中使用较小的存储器部件,例如微机电系统(“mems”)。常规的旋转导向系统摒弃较小的存储器部件,而倾向于采用能够存储测井所需数据的较大的存储器部件。此外,本文公开的旋转导向系统在控制部分12中仅包括三个传感器,从而缩短了控制部分12的长度。常规的旋转导向系统包括较多数量的传感器,这需要更长长度的控制部分。另一个示例是定子端口73的形状横跨阀定子26的厚度而转变,这缩短了阀组件和活塞80之间的导向壳体22中所需的转变流动管线的长度。此外,分配流接纳部72在导向部分14内的中心位置消除了对卡盘的需求,卡盘在常规的旋转导向系统中在阀和活塞之间变换主流动管线和分配流动管线。
88.本文公开的旋转导向系统长度的缩短长度提供了需要较少材料用于构造的商业优势,从而降低了制造和维护成本。在一些实施例中,本文公开的旋转导向系统的部件更容易从旋转导向系统的外部接近,这使得用户能够在不需要将旋转导向系统运输到车间的情况下在任何位置执行某些额外的维护任务。
89.在其他实施例中,本发明的旋转导向系统仅包括导向部分,而没有控制部分。在该实施例中,控制部分的元件可以被结合到导向部分中、被定位在钻柱中的相邻设备中、被消除、或者以上这些的任意组合。
90.如图2至图9所示,本文公开的旋转导向系统,例如旋转导向系统10,包括九个模块,其中每个模块包括可以独立于其他模块进行维护、组装、拆卸或更换的单元。本文公开的旋转导向系统的模块在下面的表2中列出。
[0091][0092][0093]
表2
[0094]
如本文所用,“上”和“下”将被广义地解释为包括“近侧”和“远侧”,使得结构可以不定位在竖直布置中。此外,被描述为“上”和“下”的元件可以颠倒,使得结构可以被构造成位于相反的竖直布置中。
[0095]
除非另有描述或说明,否则该设备中的每个部件都具有大致圆柱形的形状,并且可以由钢、另一种金属或任何其他耐用材料形成。旋转导向系统的部分可以由耐磨材料(诸如碳化钨或陶瓷涂层钢)形成。
[0096]
本公开中描述的每个设备可以包括各个设备实施例中的每个实施例的所描述的部件、特征和/或功能的任何组合。本公开中描述的每个方法可以包括以任何顺序描述的步骤的任何组合,包括缺少某些描述的步骤和在单独的实施例中使用的步骤的组合。本文公开的任何数值范围包括该范围内的任何子范围。“多个(plurality)”意味着两个或更多个。“上方”和“下方”应各自理解为意味着上游和下游,使得设备的方向性取向不局限于竖直布置。
[0097]
虽然已经描述了优选的实施例,但是应当理解的是,这些实施例仅仅是说明性的,并且本发明的范围将仅由所附的权利要求(当赋予本领域技术人员根据对本发明的查阅自然地想到的等同物、许多变化和修改的全部范围时)限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1