竖井掘进用六自由度水下机器人的制作方法
本发明涉及一种土体挖掘设备,尤其涉及一种竖井掘进用六自由度水下机器人。
背景技术:
1、深竖井施工工艺除了传统明挖法及传统沉井施工外,主要的施工技术有压入式沉井法、气压沉箱法、vsm(下沉式竖井掘进机)等施工工艺。
2、传统沉井通过土体挖掘设备开挖刃脚下方土体,并利用结构自重实现下沉。压入式沉井法施工主要通过土体挖掘设备控制刃脚土体开挖量,再配以辅助下沉措施进行压入下沉,结构采用分节浇筑、多次下沉。气压沉箱法是在沉箱下部预先构筑底板,在沉箱下部形成一个气密性高的钢筋混凝土结构工作室,向工作室内注入压力与刃口处地下水压力相等的压缩空气,使其在无水境下进行取土排土,箱体在本身自重以及上部荷载的作用下下沉到指定深度,然后进行封底施工。vsm(下沉式竖井掘进机)采用内部结构预制化管节,通过配有伸缩铣挖臂进行机械式切削,土渣通过土转液装置排至地面,再通过地面动力装置进行控制管节的吊装、下沉。
3、在不同形式的沉井施工工艺中,均需要通过水下机器人等土体挖掘设备开挖井底土体并将碴土排放到地面上,现有技术的土体挖掘设备需要固定安装在沉井的管节上,再向下伸出至井底,实现土体挖掘。现有技术的土体挖掘设备受到沉井管节的限制,转动自由度受限,使用不灵活,导致土体开挖的控制精度下降,同时也可能与沉井结构底部的十字梁发生碰撞而导致土体开挖受阻,影响沉井的下沉施工。因此,需要提供一种可向各个方向灵活转动的竖井掘进用六自由度水下机器人,以解决现有技术中土体挖掘设备转动自由度受限的问题。
技术实现思路
1、本发明的目的在于提供一种竖井掘进用六自由度水下机器人,可向各个方向灵活转动,以解决现有技术中土体挖掘设备转动自由度受限的问题。
2、本发明是这样实现的:
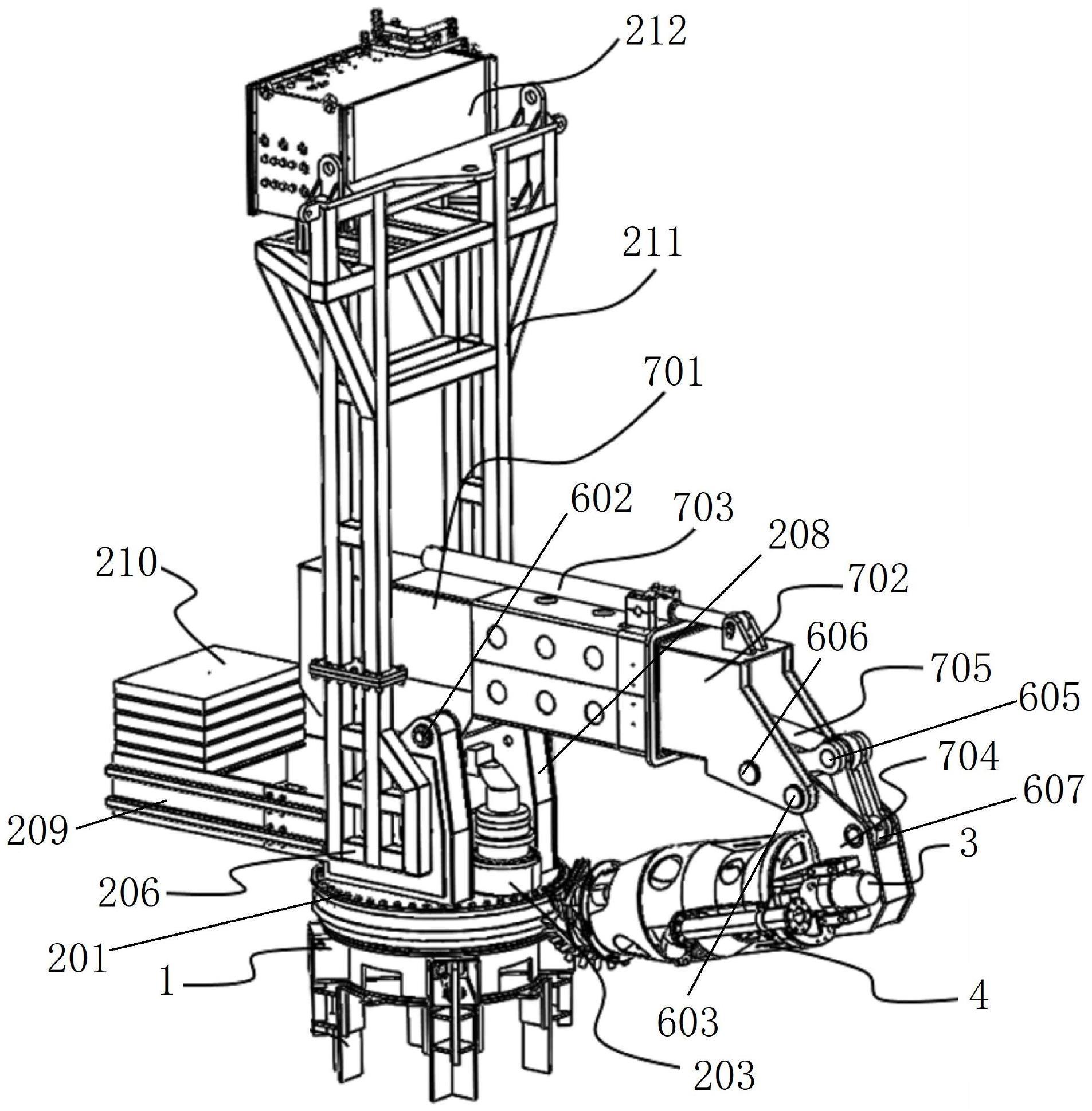
3、一种竖井掘进用六自由度水下机器人,包括固定底座、转台组件、机械臂组件、摆动驱动件、疏浚泵和升降驱动件;固定底座固定安装在沉井结构的十字梁顶部中心,转台组件可转动式安装在固定底座上;升降驱动件固定安装在转台组件上,机械臂组件的一端与升降驱动件的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件相对转台组件竖向转动;疏浚泵通过摆动驱动件可摆动式安装在机械臂组件的另一端,使疏浚泵能在固定底座的四周转动、升降或摆动并挖掘土体。
4、所述的转台组件包括齿轮环、驱动齿轮、液压驱动件、减速器、回转支承轴承和转台;转台与回转支承轴承的外圈可转动式连接,回转支承轴承的内圈固定安装在固定底座上,液压驱动件和减速器连接,减速器安装在转台上,驱动齿轮固定安装在减速器的输出轴上,驱动齿轮与齿轮环的内圈啮合连接,齿轮环固定连接在回转支承轴承的内圈上。
5、所述的固定底座的外侧壁上间隔设有若干道唇形密封圈,回转支承轴承的底部外侧通过密封块密封压紧在若干道唇形密封圈上,使固定底座与转支承轴承可转动式密封连接。
6、所述的转台上设有延伸平台,延伸平台和机械臂组件位于同一竖直平面内且分别向转台的两侧延伸,延伸平台上设有配重。
7、所述的转台上安装有支架,支架上安装有控制箱柜,控制箱柜与转台组件、机械臂组件、摆动驱动件、疏浚泵和升降驱动件电连接。
8、所述的机械臂组件包括动臂、二节臂、伸缩驱动件、关节臂和关节伸缩机构;动臂的一端与升降驱动件的驱动端可转动式连接,动臂的底部中部与转台组件可转动式连接;二节臂的一端插入在动臂内,伸缩驱动件固定安装在动臂的外壁上,二节臂的另一端延伸至动臂的另一端外部并与伸缩驱动件的驱动件端固定连接;关节臂的一端与二节臂的另一端可转动式连接,关节伸缩机构安装在二节臂内,关节伸缩机构的伸缩端延伸至二节臂的另一端外部并与关节臂的中部可转动式连接;疏浚泵通过摆动驱动件可摆动式安装在关节臂的另一端。
9、所述的关节伸缩机构包括关节驱动件、第一关节连杆和第二关节连杆;关节驱动件可转动式安装在二节臂的内壁顶部,关节驱动件的驱动端延伸至二节臂的另一端外部并与第一关节连杆和第二关节连杆的一端可转动式连接;第一关节连杆的另一端与二节臂的另一端可转动式连接,第二关节连杆的另一端与关节臂的中部可转动式连接。
10、本发明与现有技术相比,具有以下有益效果:
11、1、本发明由于设有转台组件、机械臂组件、摆动驱动件和升降驱动件,能通过转台组件实现疏浚泵的正向和反向水平转向功能,通过机械臂组件实现疏浚泵的伸缩和竖向转向功能,通过摆动驱动件实现疏浚泵的横向摆动功能,通过升降驱动件经机械臂组件实现疏浚泵的升降功能,使疏浚泵具有六自由度活动功能,灵活性高,从而能满足不同方向、不同距离、不同深度、不同角度的土体掘进要求,有利于提高土体掘进效率和安全可控性。
12、2、本发明由于设有控制箱柜和配重,能通过控制箱柜联动控制升降驱动件、液压驱动件、伸缩驱动件、关节驱动件和摆动驱动件,在保证疏浚泵灵活掘进功能的同时提高疏浚泵的控制自动化程度和机械化程度,减少施工人员的辅助作业,同时通过配重保证水下机器人运行过程中的平稳性和安全性,从而保证沉井底面土体挖掘的阻力分布、水平度等的精确控制,进而提高沉井施工的效率和质量。
13、3、本发明由于通过固定底座安装在十字梁的顶部中心,可避免现有技术中转向受到沉井管节限制的问题,同时能通过下降、转向和摆动实现十字梁底部土体的开挖,有效避免移动、转向和掘进过程中与十字梁发生碰撞,施工安全性高。
技术特征:
1.一种竖井掘进用六自由度水下机器人,其特征是:包括固定底座(1)、转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5);固定底座(1)固定安装在沉井结构的十字梁顶部中心,转台组件可转动式安装在固定底座(1)上;升降驱动件(5)固定安装在转台组件上,机械臂组件的一端与升降驱动件(5)的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件(5)相对转台组件竖向转动;疏浚泵(4)通过摆动驱动件(3)可摆动式安装在机械臂组件的另一端,使疏浚泵(4)能在固定底座(1)的四周转动、升降或摆动并挖掘土体。
2.根据权利要求1所述的竖井掘进用六自由度水下机器人,其特征是:所述的转台组件包括齿轮环(201)、驱动齿轮(202)、液压驱动件(203)、减速器(204)、回转支承轴承(205)和转台(206);转台(206)与回转支承轴承(205)的外圈可转动式连接,回转支承轴承(205)的内圈固定安装在固定底座(1)上,液压驱动件(203)和减速器(204)连接,减速器(204)安装在转台(206)上,驱动齿轮(202)固定安装在减速器(204)的输出轴上,驱动齿轮(202)与齿轮环(201)的内圈啮合连接,齿轮环(201)固定连接在回转支承轴承(205)的内圈上。
3.根据权利要求2所述的竖井掘进用六自由度水下机器人,其特征是:所述的固定底座(1)的外侧壁上间隔设有若干道唇形密封圈(101),回转支承轴承(205)的底部外侧通过密封块(207)密封压紧在若干道唇形密封圈(101)上,使固定底座(1)与转支承轴承(205)可转动式密封连接。
4.根据权利要求2所述的竖井掘进用六自由度水下机器人,其特征是:所述的转台(206)上设有延伸平台(209),延伸平台(209)和机械臂组件位于同一竖直平面内且分别向转台(206)的两侧延伸,延伸平台(209)上设有配重(210)。
5.根据权利要求2或4所述的竖井掘进用六自由度水下机器人,其特征是:所述的转台(206)上安装有支架(211),支架(211)上安装有控制箱柜(212),控制箱柜(212)与转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5)电连接。
6.根据权利要求5所述的竖井掘进用六自由度水下机器人,其特征是:所述的机械臂组件包括动臂(701)、二节臂(702)、伸缩驱动件(703)、关节臂(704)和关节伸缩机构;动臂(701)的一端与升降驱动件(5)的驱动端可转动式连接,动臂(701)的底部中部与转台组件可转动式连接;二节臂(702)的一端插入在动臂(701)内,伸缩驱动件(703)固定安装在动臂(701)的外壁上,二节臂(702)的另一端延伸至动臂(701)的另一端外部并与伸缩驱动件(703)的驱动件端固定连接;关节臂(704)的一端与二节臂(702)的另一端可转动式连接,关节伸缩机构安装在二节臂(702)内,关节伸缩机构的伸缩端延伸至二节臂(702)的另一端外部并与关节臂(704)的中部可转动式连接;疏浚泵(4)通过摆动驱动件(3)可摆动式安装在关节臂(704)的另一端。
7.根据权利要求6所述的竖井掘进用六自由度水下机器人,其特征是:所述的关节伸缩机构包括关节驱动件(705)、第一关节连杆(706)和第二关节连杆(707);关节驱动件(705)可转动式安装在二节臂(702)的内壁顶部,关节驱动件(705)的驱动端延伸至二节臂(702)的另一端外部并与第一关节连杆(706)和第二关节连杆(707)的一端可转动式连接;第一关节连杆(706)的另一端与二节臂(702)的另一端可转动式连接,第二关节连杆(707)的另一端与关节臂(704)的中部可转动式连接。
技术总结
本发明公开了一种竖井掘进用六自由度水下机器人,包括固定底座(1)、转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5);固定底座固定装在沉井结构的十字梁顶部中心,转台组件可转动式装在固定底座上;升降驱动件固定安装在转台组件上,机械臂组件的一端与升降驱动件的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件相对转台组件竖向转动;疏浚泵通过摆动驱动件可摆动式安装在机械臂组件的另一端,使疏浚泵能在固定底座的四周转动、升降或摆动并挖掘土体。本发明可向各个方向灵活转动,以解决现有技术中土体挖掘设备转动自由度受限的问题。
技术研发人员:吴文斐,翟一欣,朱雁飞,屠磊,朱叶艇,闵锐,潘伟强,韩雅海,陈柳锋,楚灯旺,彭世宝,顾旭莹,王皓辉,朱福民,刘玉军,张艳栋,李维浩,张锋垚
受保护的技术使用者:上海城建隧道装备有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!