一种基于钻孔成像的纵向裂隙识别与参数自动提取方法
本发明涉及地质勘探,具体是一种基于钻孔成像的纵向裂隙识别与参数自动提取方法。
背景技术:
1、裂隙特征对岩体稳定性具有重要影响,特别是巷道顶板中纵向裂隙极易导致巷道失稳。井下常用钻孔成像法对顶板岩层中裂隙分布情况进行观测分析。钻孔成像仪可以对孔壁进行拍照、摄像,当前的钻孔成像仪可以自动导出数字岩芯柱状图。通过对钻孔柱状图的观察,可以分析岩性、裂隙等特征,从而为地下工程活动提供重要地质保障。
2、目前,钻孔成像仪缺乏一种岩层裂隙智能识别系统,人们仍主要依靠观察法分析裂隙特征,当所需要分析的岩芯柱状图样本量大时,这不仅费时、费力,而且需要地质专业领域人员分析,观察法也很容易忽略一些重要裂隙信息。现有技术中,申请号:202110056319.6,一种基于深度学习的钻孔图像裂隙参数自动提取方法,使用训练好的所述裂隙图像识别模型对待检测的裂隙图像进行检测,并使用p-r曲线或roc曲线的曲线检测技术对检测的结果进行处理,提取出所述待检测的裂隙图像中裂隙的相关像素信息。该方法计算量大,且完全依靠神经网络进行识别,对成像图像清晰度要求高,对于钻孔图像中多裂隙情况参数自动提取方法未进行说明,识别的系统算力要求高,识别效率低,其主要针对正弦特征裂隙检测;
3、因此急需一种新的基于钻孔成像的纵向裂隙识别与参数自动提取方法来解决上述问题。
技术实现思路
1、针对上述技术的不足之处,提供一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其确获取岩层中纵向裂隙分布特征速度快,准确率高,能够有效避免因主观影响误判而导致巷道失稳事故。
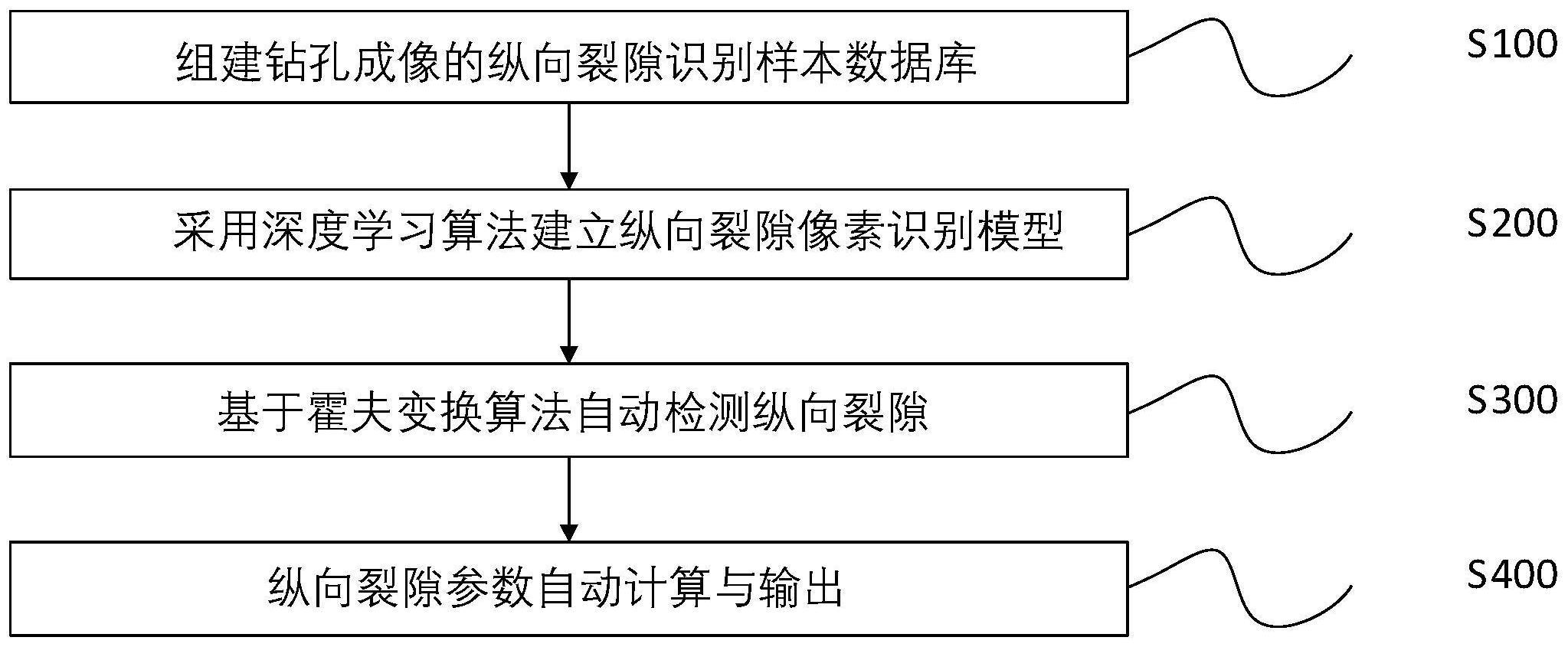
2、本发明一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,具体步骤如下:
3、a采用三维钻孔成像仪采集大量钻孔内的视频图像,最终形成钻孔成像的纵向裂隙识别样本数据库,
4、b利用纵向裂隙识别样本数据库作为训练集和测试集,采用深度学习算法建立纵向裂隙像素识别模型;
5、c基于纵向裂隙像素识别模型和霍夫变换算法自动检测纵向裂隙,并提出纵向裂隙的参数计算模型;
6、d纵向裂隙参数的计算与输出。
7、进一步,所述的组建钻孔成像的纵向裂隙识别样本数据库的步骤包括;
8、a1获取大量锚固孔图像;
9、a2将锚固孔图像像素分为背景像素、干扰像素和纵向裂隙像素;
10、a3对锚固孔图像像素进行标注;
11、其中,所述的锚固孔图像为数字岩芯柱状展开图;所述背景像素为完整岩石像素;干扰像素为类似于纵向裂隙的像素:如正弦状裂隙像素、破碎区像素、岩层分界面像素;所述纵向裂隙像素为与水平面夹角大于45°的裂隙像素。
12、进一步,所述的深度学习算法包括fcn、u-net、segnet、deeplabv3+中的任意一种。
13、进一步,所述基于霍夫变换算法自动检测纵向裂隙步骤包括:
14、b1将每一幅锚固孔图像中全部被识别的像素中,利用数字“1”替代纵向裂隙的像素,被识别的其它像素用“0”替代,将锚固孔图像转化为只含有数字“0”和“1”的矩阵;
15、b2基于上述得到的矩阵,调用matlab中霍夫变换算法包,设置阈值为1,识别该矩阵中数字“1”形成的纵向裂隙,纵向裂隙可能是连续的,也可能是分段的;若“1”形成连续性的裂隙,则得到一条线段及其两个端点坐标,若“1”形成的裂隙是分段裂隙,则得到各分段裂隙的线段及两个端点坐标;
16、b3当只有两个端点坐标,则判断被识别的裂隙为连续裂隙时,存储该纵向裂隙的两端端点坐标;
17、b4当识别到2n个端点坐标,则判断被识别的裂隙为n个分段裂隙时,为避免误判,则分别计算各段裂隙的倾角,将相邻且倾角差小于5°的分段裂隙识为同一个纵向裂隙,否则视为不同的纵向裂隙,存储各纵向裂隙端点坐标;
18、b5将被识别的纵向裂隙删除,具体方法为将之前标注数字“1”的像素位置重置为“0”;
19、b6继续检测矩阵中是否还有数字“1”,若有,则重复步骤b2~b5,否则结束。
20、进一步,利用黑色填充标注为数字“1”的像素,利用白色填充标注为数字“0”的像素,以所得到的纵向裂隙端点坐标为基点,搜索端点坐标位置四周是否有黑色像素,若有则以该黑色像素为基点继续搜索其四周的黑色像素,最终得到该纵向裂隙的所有像素点,从而获得纵向裂隙的图像信息;之后将纵向裂隙的像素点全部替换为白色,继续通过像素填充色继续寻找其它裂隙。
21、进一步,所述纵向裂隙计算的参数包括:纵向裂隙的倾角、起点或终点位置、连续性系数和长度。
22、进一步,纵向裂隙的起点位置或者终点位置像素点坐标计算过程为:
23、
24、
25、式中,l1和l2分别表示纵向裂隙的起点位置和终点位置;h表示锚固孔深度;m表示锚固孔图像纵向像素总量;ya和yb分别表示纵向裂隙起点和终点位置像素在图片中的纵坐标。
26、进一步,所述的纵向裂隙的连续性系数计算过程为:
27、
28、式中,λ表示纵向裂隙连续性系数;ki表示第i段纵向裂隙长度;k表示该纵向裂隙总长度。
29、进一步,纵向裂隙的倾角计算过程为:
30、
31、式中,β表示纵向裂隙倾角;d表示锚固孔直径;xa和xb分别表示纵向裂隙起点和终点位置的横坐标。
32、进一步,所述的纵向裂隙的长度计算过程为:
33、
34、式中,l是该纵向裂隙端点在三维岩芯柱状图中的直线距离。
35、本发明与现有技术相比,具有以下优点和有益效果:
36、1、本发明提出了锚固孔图像中纵向裂隙的位置、倾角、连续性系数和长度计算方法,为钻孔成像裂隙自动识别及参数自动输出奠定了基础。
37、2、本发明提出将锚固孔图像像素分为背景像素、干扰像素和纵向裂隙像素,采用深度学习算法的语义分割模型对纵向裂隙像素进行识别,相比于传统的边缘检测算法,本发明的纵向裂隙像素识别方法精度更高。
38、3、本发明直接采用霍夫变换算法对被识别的纵向裂隙像素进行直线检测,该方法具有较强的抗干扰能力,当纵向裂隙与破碎区相交,或受到岩层界面影响时,均可以有效识别纵向裂隙。
39、4、本发明提出将纵向裂隙像素用数字“1”表示,其它像素用数字“0”表示,将锚固孔图像转换为数字矩阵,在此基础上提出了采用换霍夫变换法进行多纵向裂隙识别的方法。
40、5、本发明自动化程度高,可以自动输出纵向裂隙参数,促使原有的钻孔成像法由人工定性分析向智能化定量分析转变。
技术特征:
1.一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,具体步骤如下:
2.根据权利要求1所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述的组建钻孔成像的纵向裂隙识别样本数据库的步骤包括:
3.根据权利要求1所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述的深度学习算法包括fcn、u-net、segnet、deeplabv3+中的任意一种。
4.根据权利要求1所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述基于霍夫变换算法自动检测纵向裂隙步骤包括:
5.根据权利要求4所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,利用黑色填充标注为数字“1”的像素,利用白色填充标注为数字“0”的像素,以所得到的纵向裂隙端点坐标为基点,搜索端点坐标位置四周是否有黑色像素,若有则以该黑色像素为基点继续搜索其四周的黑色像素,最终得到该纵向裂隙的所有像素点,从而获得纵向裂隙的图像信息;之后将纵向裂隙的像素点全部替换为白色,继续通过像素填充色继续寻找其它裂隙。
6.根据权利要求1所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述纵向裂隙计算的参数包括:纵向裂隙的倾角、起点或终点位置、连续性系数和长度。
7.根据权利要求6所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,纵向裂隙的起点位置或者终点位置像素点坐标计算过程为:
8.根据权利要求6所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述的纵向裂隙的连续性系数计算过程为:
9.根据权利要求6所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,纵向裂隙的倾角计算过程为:
10.根据权利要求6所述的一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,其特征在于,所述的纵向裂隙的长度计算过程为:
技术总结
本发明公开一种基于钻孔成像的纵向裂隙识别与参数自动提取方法,属于地下工程岩层特征探测技术领域。首先组建钻孔成像的纵向裂隙识别样本数据库;然后采用深度学习算法建立纵向裂隙像素识别模型;基于霍夫变换算法自动检测纵向裂隙;最后进行纵向裂隙参数自动计算,包纵向裂隙倾角、位置、连续性系数和长度。其有效解决现有钻孔成像法仍主要依靠人眼观察进行裂隙特征分析,其受主观影响大、速度慢、精度低的问题。将促进钻孔成像技术由人工定性分析向智能化定量分析转变,为地下工程活动提供地质保障。
技术研发人员:刘灿灿,郑西贵,辛维,闫建军,岳虎,陈春
受保护的技术使用者:中国矿业大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!