凿岩台车自动调平方法、系统、运行装置和存储介质与流程
本发明涉及隧道施工,更具体地说,涉及一种凿岩台车自动调平方法,还涉及一种采用上述凿岩台车自动调平方法的系统,还涉及一种采用上述凿岩台车自动调平方法的运行装置,还涉及一种存储上述凿岩台车自动调平方法的计算机可读存储介质。
背景技术:
1、当前隧道施工采用的工法主要有“盾构法”和“钻爆法”,凿岩台车作为“钻爆法”的核心设备,在施工过程中发挥着举足轻重的作用。
2、根据钻爆工艺要求,凿岩台车在施工过程中,通过驱动钻臂调节凿岩机在掌子面上的开孔位置以及角度,从而在掌子面上钻出期望的炮眼。在掌子面的炮眼布置中,很多炮眼对于推进梁的姿态要求是一样,例如辅助炮眼,推进梁的姿态一般是垂直掌子面。对于这种类型的炮眼,当钻完一个炮眼,移动臂架至下一个炮眼时,在移动臂架的过程中,推进梁相对于掌子面的姿态也随着改变了。为了使推进梁姿态在移臂过程中保持不变,现有的技术手段主要有以下三种:
3、手动操作调平:在驱动其他钻臂的过程中,如果发现推进梁姿态发生变化,手动操作推进梁控制装置,使得推进梁姿态保持不变,这种方法精度低,且对操作人员经验要求很高;
4、机械联动调平:机械联动调平系统通过一组独立调平油缸,利用相似三角形原理,使钻臂在俯仰或者横摆过程当中,推进梁相对掌子面姿态不变。这种机械调平的方法控制过程比较简单,但是机械结构复杂,且液压元件比较多,调平油缸增不仅大了臂架负荷,还使钻臂机构尺寸增大;
5、电液比例调平系统:电液调平系统基本原理是先建立臂架动力学模型,然后利用在推进机构上的传感器来感知推进机构的状态,然后根据炮眼在掌子面上的位置,反算出臂架每个目标关节角度,并产生相应的电信号,控制各液压缸的动作,最终使推进机构保持平行。具备电液调平系统的凿岩台车结构上更为精简,降低了钻臂头部整体质量,目前,在一些国际品牌的高端设备中已有所应用。但是这种方法臂架建模与计算复杂,臂架每个关节都需要安装传感器,成本较高。
6、综上所述,如何有效地解决目前凿岩台车调平方式不简单方便的问题,是目前本领域技术人员急需解决的问题。
技术实现思路
1、有鉴于此,本发明的第一个目的在于提供一种凿岩台车自动调平方法,该凿岩台车自动调平方法可以有效地解决目前凿岩台车调平方式不简单方便的问题;本发明的第二个目的是提供一种采用上述凿岩台车自动调平方法的系统;本发明的第三个目的是提供一种采用上述凿岩台车自动调平方法的运行装置;本发明的第四个目的是提供一种存储上述凿岩台车自动调平方法的计算机可读存储介质。
2、为了达到上述第一个目的,本发明提供如下技术方案:
3、一种凿岩台车自动调平方法,包括如下步骤:
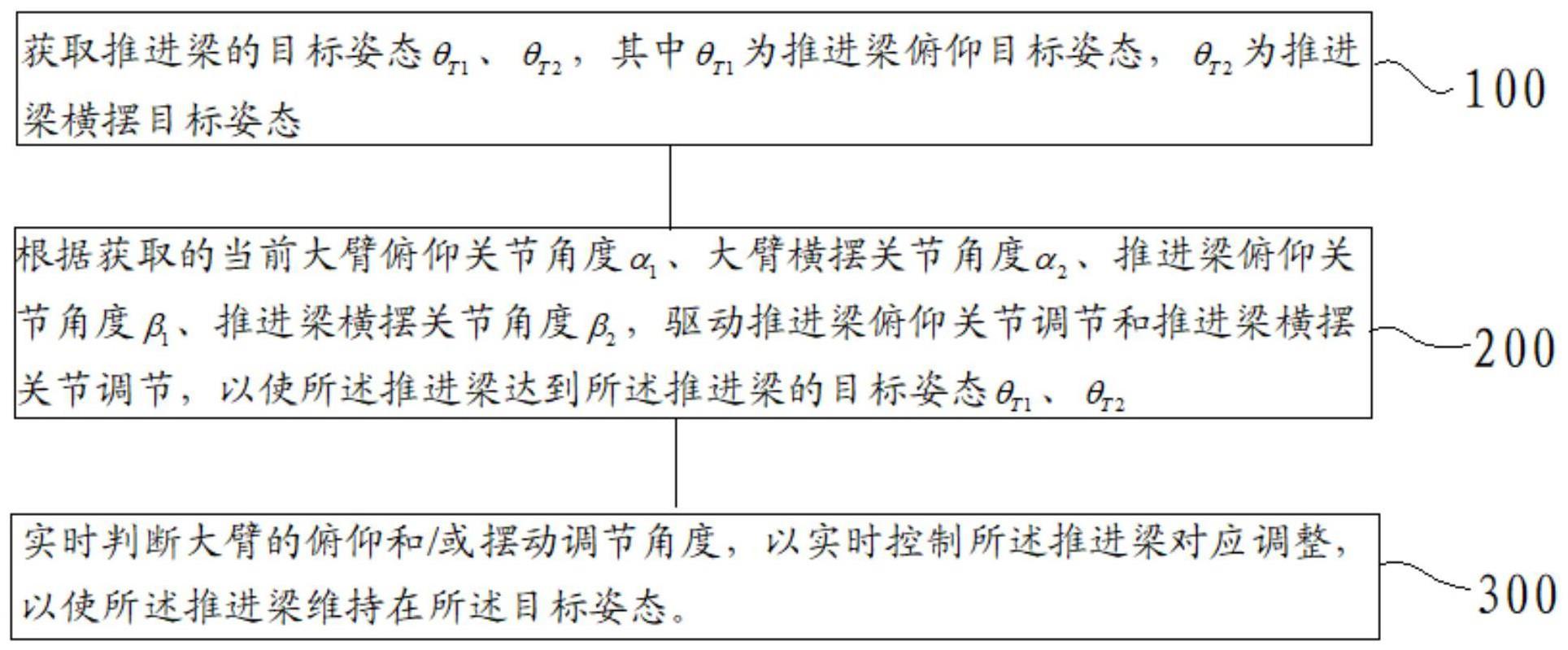
4、获取推进梁的目标姿态θt1、θt2,其中θt1为推进梁俯仰目标姿态,θt2为推进梁横摆目标姿态;
5、根据获取的当前大臂俯仰关节角度α1、当前大臂横摆关节角度α2、当前推进梁俯仰关节角度β1、当前推进梁横摆关节角度β2,驱动推进梁俯仰关节调节和推进梁横摆关节调节,以使所述推进梁达到所述推进梁的目标姿态θt1、θt2;
6、实时判断大臂的俯仰和/或摆动调节角度,以实时控制所述推进梁对应调整,以使所述推进梁维持在所述目标姿态。
7、在该凿岩台车自动调平方法中,先根据推进梁的目标姿态,以及当前的当前大臂俯仰关节角度α1、大臂横摆关节角度α2、推进梁俯仰关节角度β1、推进梁横摆关节角度β2,仅调节当前推动梁俯仰和摆动,以使得推动梁先活动至目标姿态。然后通过大臂调整位置,而在大臂调整位置过程中,实时检测大臂的调整,相对应的调整推进梁,以使得大臂调整过程中推进梁始终保持在目标姿态,直到通过大臂的调节,使得推进梁活动至对应的炮眼位置,此时推进梁的推进路径延伸线与目标炮眼重合。在该凿岩台车自动调平方法中,先将推进梁调整至目标姿态,然后在通过大臂调整位置过程中,推进梁和大臂之间的关节对应调整,以使得推进梁保持在当前的目标姿态,此时只需要单一的控制大臂位置,便可实现推进梁移动至目标炮眼处,整个调节过程更为简单方便。综上所述,该凿岩台车自动调平方法能够有效地解决目前凿岩台车调平方式不简单方便的问题。
8、优选地,所述实时判断大臂的俯仰和/或摆动调节角度,以实时控制所述推进梁对应调整,以使所述推进梁维持在所述目标姿态,包括:
9、当判断大臂俯仰有动作时,记录动作开始时刻的大臂俯仰关节角度α1s和推进梁俯仰关节角度β1s,并实时采集动作过程中的当前大臂俯仰关节角度α1和当前推进梁俯仰关节角度β1,然后计算推进梁的动态目标俯仰关节角度β't1,并对应驱动推进梁俯仰关节俯仰调节β't1,其中β't1=α1-α1s+β1s。
10、优选地,所述实时判断大臂的俯仰和/或摆动调节角度,以实时控制所述推进梁对应调整,以使所述推进梁维持在所述目标姿态,包括:
11、当判断大臂横摆有动作时,记录动作开始时刻的大臂横摆关节角度α2s和推进梁横摆关节角度β2s,并实时采集动作过程中当前大臂横摆关节角度α2和当前推进梁横摆关节角度β2,然后计算推进梁的动态目标横摆关节角度β't2,并对应驱动推进梁横摆关节摆动调节β't2,其中β't2=α2-α2s+β2s。
12、优选地,所述根据获取的当前大臂俯仰关节角度α1、当前大臂横摆关节角度α2、当前推进梁俯仰关节角度β1、当前推进梁横摆关节角度β2,驱动推进梁俯仰关节调节和推进梁横摆关节调节,以使所述推进梁达到所述推进梁的目标姿态θt1、θt2;包括:
13、根据获取当前大臂俯仰关节角度α1和大臂横摆关节角度α2,以得到推进梁俯仰目标关节角度βt1=90°+α1-θt1,以及得到推进梁横摆目标关节角度βt2=90°+α2-θt2;
14、据获取的当前推进梁俯仰关节角度β1、当前推进梁横摆关节角度β2、推进梁俯仰关节目标角度βt1以及推进梁横摆关节目标角度βt2,分别得到推进梁俯仰关节角度差e1、推进梁横摆关节角度差e2,然后根据e1、e1驱动推进梁俯仰关节和推进梁横摆关节调节以达到目标角度。
15、优选地,所述获取推进梁的目标姿态θt1、θt2;包括:
16、依据炮眼相对掌子面的倾斜角度,对炮眼进行分组,以建立组别和炮眼角度的对应关系表;
17、获取目标炮眼的组别;
18、根据所述目标炮眼的组别,查询所述对应关系表以获取对应炮眼角度,并作为推进梁的目标姿态θt1、θt2。
19、为了达到上述第二个目的,本发明还提供了一种凿岩台车自动调平系统,该凿岩台车自动调平系统包括:大臂俯仰关节角度传感器、大臂横摆关节角度传感器、推进梁俯仰关节角度传感器、推进梁横摆关节角度传感器;以及,还包括大臂俯仰关节驱动器、大臂横摆关节驱动器、推进梁俯仰关节驱动器、推进梁横摆关节驱动器;以及,还包括控制器,控制器与所述大臂俯仰关节角度传感器、所述大臂横摆关节角度传感器、所述推进梁俯仰关节角度传感器、所述推进梁横摆关节角度传感器连接,且与所述大臂俯仰关节驱动器、所述大臂横摆关节驱动器、所述推进梁俯仰关节驱动器、所述推进梁横摆关节驱动器均控制连接;控制器能够执行上述任一种所述的凿岩台车自动调平方法的步骤。由于上述的凿岩台车自动调平方法具有上述技术效果,采用该凿岩台车自动调平方法的凿岩台车自动调平系统也应具有相应的技术效果。
20、为了达到上述第三个目的,本发明还提供了一种凿岩台车运行装置,该凿岩台车运行装置包括存储介质和处理器,所述存储介质被配置为能够存储计算机程序,所述计算机程序被所述处理器执行时能够实现上述任一项所述的凿岩台车自动调平方法的步骤。由于上述的凿岩台车自动调平方法具有上述技术效果,采用该凿岩台车自动调平方法的凿岩台车运行装置也应具有相应的技术效果。
21、为了达到上述第四个目的,本发明还提供了一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时,能够实现上述任一项所述的凿岩台车自动调平方法。由于上述的凿岩台车自动调平方法具有上述技术效果,存储该凿岩台车自动调平方法的计算机可读存储介质也应具有相应的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!