掘进设备的控制方法、控制装置和掘进设备与流程
本发明涉及工程设备,具体而言,涉及一种掘进设备的控制方法、控制装置和掘进设备。
背景技术:
1、相关技术中,掘进机在运行过程中,需要以预设的轮廓线为基准进行掘进,以保证巷道的形状,然而,在实现本发明过程中,发明人发现现有技术中至少存在如下问题:掘进机前进的过程中会产生位移偏差,从而导致掘进出现超挖和欠挖现象,无法保证进尺的准确性,因此,如何提高掘进机运行过程中进尺量的准确性,成为了亟待解决的问题。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的掘进机前进的过程中会产生位移偏差,从而导致掘进出现超挖和欠挖现象,无法保证进尺的准确性的问题。
2、为此,本发明的第一方面提出了一种掘进设备的控制方法。
3、本发明的第二方面提出了一种掘进设备的控制装置。
4、本发明的第三方面提出了一种掘进设备的控制装置。
5、本发明的第四方面提出了一种可读存储介质。
6、本发明的第五方面提出了一种掘进设备。
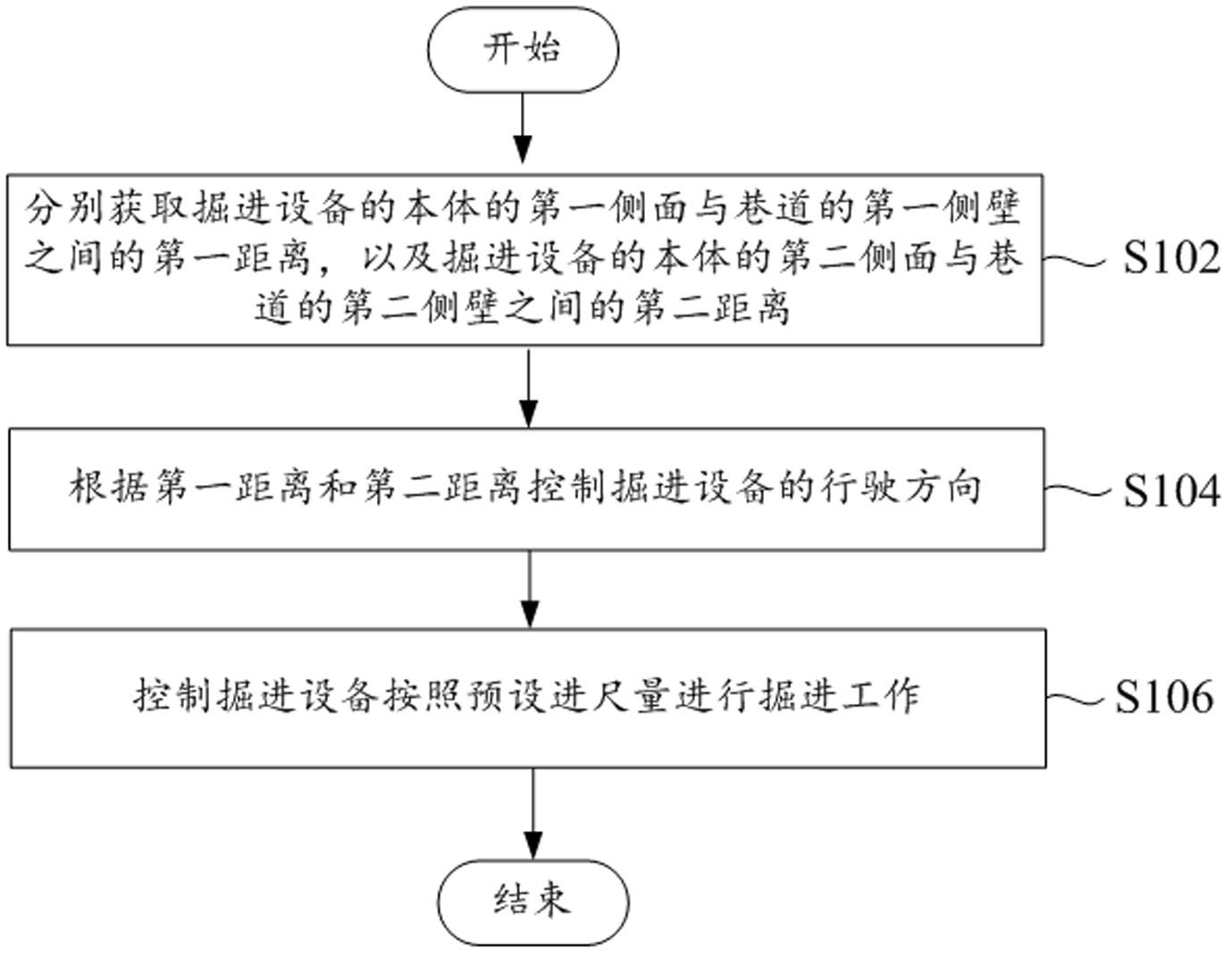
7、有鉴于此,本发明的第一方面提出了一种掘进设备的控制方法,包括:分别获取掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离;根据第一距离和第二距离控制掘进设备的行驶方向,以使掘进设备的中心轴线与巷道的中心轴线之间的夹角小于预设角度,且与巷道的中心轴线之间的最大距离小于预设距离;控制掘进设备按照预设进尺量进行掘进工作。
8、本发明提供的掘进设备的控制方法,可以用于控制掘进设备的运行,以实现掘进设备的自动运行,提高掘进设备的自动化程度,减少人工劳动力,提高掘进设备的运行效率。
9、具体地,掘进设备的控制方法包括:首先,分别获取掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离。可以理解的是,掘进设备在掘进的过程中,会按照预设的方向和预设的进尺量在巷道内进行掘进。此时,可以分别获取掘进设备的本体的两侧与巷道的两个侧壁之间的距离。也就是掘进设备本体的第一侧面与巷道的第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离。可以理解的是,在掘进设备的行驶方向的两侧,掘进设备的本体具有第一侧面和第二侧面,相应地,在巷道内,与第一侧面相对的侧壁为第一侧壁,与第二侧面相对的侧壁为第二侧壁。
10、进一步地,在获取到第一距离和第二距离之后,可以根据第一距离和第二距离对掘进设备的行驶方向进行调整。从而使得掘进设备的中心轴线的延伸方向与巷道的中心轴线的延伸方向之间的夹角小于预设角度,优选使得掘进设备的中心轴线的延伸方向与巷道的中心轴线的延伸方向能够一致,也就是使得掘进设备的行驶方向能够沿预设的巷道的延伸方向前进,从而避免掘进设备角度发生过度倾斜导致发生超挖现象。
11、同时,在保证掘进设备的中心轴线的方向与巷道的延伸方向之间的夹角小于预设角度的基础上,还可以使得掘进设备的中心轴线与巷道的中心轴线之间的最大距离小于预设距离。可以理解的是,由于掘进设备的长度是有限的,也就是掘进设备的中心轴线长度是有限的。因此,沿垂直于巷道的底面的方向观察,掘进设备的中心轴线与巷道的中心轴线之间的最大距离,即为掘进设备的中心轴线的一侧端部在垂直于巷道的中心轴线的方向上与巷道的中心轴线之间的距离。通过掘进设备的中心轴线与巷道的中心轴线之间的最大距离的限定,从而使得掘进设备不会偏离预设掘进路线过多,以避免发生超挖现象。
12、最后,在调整好掘进设备的行驶方向之后,即可按照预设的进尺量控制掘进设备进行掘进工作。
13、具体地,掘进设备可以设置有惯性导航系统,惯性导航系统用于对掘进设备的行驶方向和行驶距离进行导航,从而保证掘进设备的进尺量。进一步地,掘进设备还可以设置有毫米波雷达,通过毫米波雷达的设置,可以实现对掘进设备本体与巷道的侧壁之间的距离的检测。具体地,毫米波雷达可以分别设置于掘进设备的本体的第一侧面和第二侧面上,并且将毫米波雷达的发射方向朝向巷道的第一侧壁和第二侧壁,以保证第一距离和第二距离的检测的准确性。进一步地,掘进设备还可以设置有控制器,控制器分别与惯性导航系统以及毫米波雷达相连接。在毫米波雷达获取到第一距离和第二距离后,即可将数据传输至控制器,同时,控制器对数据进行处理,并发送给惯性导航系统,惯性导航系统即可根据数据进行导航。
14、本发明提供的掘进设备的控制方法,通过分别获取掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离。从而可根据第一距离和第二距离对掘进设备的行驶方向进行控制,从而保证掘进设备的行驶方向与巷道的中心轴线方向之间的夹角小于预设角度,从而避免掘进设备角度发生倾斜导致发生超挖现象。同时还能够保证掘进设备的中心轴线与巷道的中心轴线之间的偏离量不会过大,从而使得掘进设备不会偏离预设掘进路线,以避免发生超挖现象。
15、另外,根据本发明提供的上述技术方案中的掘进设备的控制方法,还可以具有如下附加技术特征:
16、在上述技术方案中,进一步地,根据第一距离和第二距离控制掘进设备的行驶方向的步骤,包括:获取第一距离和第二距离之间的距离差值;在距离差值大于预设差值的情况下,根据第一距离和第二距离获取掘进设备的移动方向;根据第一距离和第二距离获取掘进设备的移动距离;根据移动方向和移动距离,控制掘进设备移动。
17、在该技术方案中,在获取到掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离之后,首先可以根据第一距离和第二距离确定二者之间的距离差值,并判断该距离差值是否大于预设差值。也就是说,通过第一距离和第二距离之间的距离差值,判断掘进设备当前是否发生偏离,具体地,在第一距离和第二距离之间的距离差值小于预设差值的情况下,则表明掘进设备的本体的两侧与巷道的两个侧壁之间相差的距离没有过大,也就是当前掘进设备并未发生偏离。相反,如果第一距离和第二距离之间的距离差值大于预设差值,则表明当前掘进设备的本体的两侧与巷道的两个侧壁之间相差的距离过大,也就是当前掘进设备发生偏离,需要进行横向调整。
18、进一步地,在第一距离与第二距离之间的距离差值大于预设差值的情况下,首先可以根据第一距离和第二距离确定掘进设备所需要进行横向调整的移动方向,然后,再根据第一距离和第二距离确定掘进设备需要进行横向调整的移动距离。最后,在掘进设备的移动方向和移动距离均确定的情况下,即可控制掘进设备按照移动方向和移动距离进行移动,进而完成掘进设备的横向调整。
19、在上述任一技术方案中,进一步地,根据第一距离和第二距离获取掘进设备的移动方向的步骤,包括:在第一距离大于第二距离的情况下,确定移动方向为朝向第一侧壁;在第一距离小于第二距离的情况下,确定移动方向为朝向第二侧壁。
20、在该技术方案中,在第一距离和第二距离之间的距离差值大于预设差值的情况下,可以根据第一距离和第二距离之间的大小关系,确定掘进设备的移动方向。具体地,在第一距离大于第二距离的情况下,则表明掘进设备的本体的第一侧面与巷道的第一侧壁之间的距离大于掘进设备的本体的第二侧面与巷道的第二侧壁之间的距离,也就是此时掘进设备的本体偏向巷道的第二侧壁,此时则可以确定掘进设备需要调整的移动方向为朝向巷道的第一侧壁。相反,在第一距离小于第二距离的情况下,则表明掘进设备的本体的第一侧面与巷道的第一侧壁之间的距离小于掘进设备的本体的第二侧面与巷道的第二侧壁之间的距离,也就是此时掘进设备的本体偏向巷道的第一侧壁,此时则可以确定掘进设备需要调整的移动方向为朝向巷道的第二侧壁。
21、在上述任一技术方案中,进一步地,根据预设公式:∣x1-x2∣÷2=x确定移动距离;其中,x1为第一距离,x2为第二距离,x为移动距离。
22、在该技术方案中,可以根据预设公式:∣x1-x2∣÷2=x确定掘进设备调整所需要的移动距离。其中,x1为第一距离,x2为第二距离,x为移动距离。可以理解的是,当掘进设备发生偏离时,第一距离与第二距离之间的距离差值为掘进设备的本体两侧与巷道侧壁之间的距离差,此时,将该距离差值除以2,则表示掘进设备偏离巷道的中心轴线的距离,也即掘进设备所需要调整的移动距离。最后,在掘进设备的移动方向和移动距离均确定的情况下,即可控制掘进设备按照移动方向和移动距离进行移动,进而完成掘进设备的横向调整。
23、在上述任一技术方案中,进一步地,掘进设备的控制方法还包括:获取掘进设备前方的巷道的前壁的点云信息;根据点云信息,确定巷道的前壁上未达到预设进尺量的欠挖位置;控制掘进设备对欠挖位置进行掘进工作。
24、在该技术方案中,在掘进设备的行驶方向调整完成之后,即可按照预设进尺量控制掘进设备进行掘进工作。而在掘进设备的中轴线上,当进尺量达到预设进尺量后,即可控制掘进设备停止前进。可以理解的是,掘进设备的悬臂的一端设置在掘进设备的本体上,悬臂的另一端设置有截割头,并且,掘进设备的悬臂相对于掘进设备的本体转动,同时,由于悬臂的长度是固定不变的,这样,在掘进设备的行驶方向上,当悬臂与掘进设备的中心轴线之间的夹角小于预设角度时,掘进的进尺量是最大的,而在掘进设备的中心轴线的两侧,进尺量相对较小。
25、因此,当在掘进设备的中轴线上进尺量达到最大时,停止控制掘进设备前进,从而可避免悬臂转动至与掘进设备的中心轴线之间的夹角小于预设角度时发生超挖现象。而此时,在掘进设备的中心轴线两侧的巷道前壁上的进尺量小于中心轴线上的进尺量,也就是中心轴线两侧存在欠挖现象,此时需要对中心轴线两侧的巷道前壁进行欠挖补偿。
26、具体地,首先获取巷道前壁的点云信息,然后根据巷道前壁的点云信息,确定巷道前壁上未达到预设进尺量的欠挖位置,最后,控制掘进设备对欠挖位置进行掘进,以实现欠挖补偿。
27、具体地,可以通过毫米波雷达进行巷道前壁的点云数据的获取。可以在掘进设备的本体的前端的两侧分别设置毫米波雷达,以保证点云数据的准确性。
28、在上述任一技术方案中,进一步地,获取掘进设备前方的巷道的前壁的点云信息的步骤之前,还包括:调节掘进设备的位置,以使掘进设备的中心轴线与巷道的中心轴线重合。
29、在该技术方案中,在控制掘进设备对巷道的前壁进行欠挖补偿之前,也就是获取巷道的前壁的点云数据之前,可以调节掘进设备的位置,以使得掘进设备的中心轴线与巷道的中心轴线重合,从而可以保证巷道前壁的点云数据的获取的准确性,避免获取巷道前壁的点云数据时发生位置偏离。
30、根据本发明的第二方面,提出了一种掘进设备的控制装置,包括:获取单元,用于分别获取掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离;控制单元,用于根据第一距离和第二距离控制掘进设备的行驶方向,以使掘进设备的中心轴线与巷道的中心轴线之间的夹角小于预设角度,且与巷道的中心轴线之间的最大距离小于预设距离;以及用于控制掘进设备按照预设进尺量进行掘进工作。
31、本发明提供的掘进设备的控制装置,通过获取单元分别获取掘进设备的本体的第一侧面与巷道第一侧壁之间的第一距离,以及掘进设备的本体的第二侧面与巷道的第二侧壁之间的第二距离。从而使得控制单元可根据第一距离和第二距离对掘进设备的行驶方向进行控制,从而保证掘进设备的行驶方向与巷道的中心轴线方向之间的夹角小于预设角度,从而避免掘进设备角度发生倾斜导致发生超挖现象。同时还能够保证掘进设备的中心轴线与巷道的中心轴线之间的偏离量不会过大,从而使得掘进设备不会偏离预设掘进路线,以避免发生超挖现象。
32、在上述任一技术方案中,进一步地,获取单元具体可以用于:获取第一距离和第二距离之间的距离差值;控制单元具体用于:在距离差值大于预设差值的情况下,根据第一距离和第二距离获取掘进设备的移动方向;根据第一距离和第二距离获取掘进设备的移动距离;根据移动方向和移动距离,控制掘进设备移动。
33、进一步地,控制单元具体还用于:在第一距离大于第二距离的情况下,确定移动方向为朝向第一侧壁;在第一距离小于第二距离的情况下,确定移动方向为朝向第二侧壁。
34、进一步地,控制单元具体还用于:根据预设公式:∣x1-x2∣÷2=x确定移动距离;其中,x1为第一距离,x2为第二距离,x为移动距离。
35、进一步地,获取单元还用于:在掘进设备的中心轴线上,巷道的进尺量达到预设进尺量的情况下,获取掘进设备前方的巷道的前壁的点云信息;根据点云信息,确定巷道的前壁上未达到预设进尺量的欠挖位置;控制单元还用于:控制掘进设备对欠挖位置进行掘进工作。
36、进一步地,在获取掘进设备前方的巷道的前壁的点云信息的步骤之前,控制单元还用于:调节掘进设备的位置,以使掘进设备的中心轴线与巷道的中心轴线重合。
37、根据本技术的第三方面,提出了一种掘进设备的控制装置,包括:处理器和存储器,存储器存储可在处理器上运行的程序或指令,程序或指令被处理器执行时实现如上述技术方案中任一项的掘进设备的控制方法的步骤。
38、本技术提供的掘进设备的控制装置,包括存储器和处理器,还包括存储在存储器上的程序或指令,该程序或指令被处理器执行时,能够实现上述技术方案中任一项的掘进设备的控制方法的步骤,因此该掘进设备的控制方法具备上述掘进设备的控制方法的全部有益效果,在此不再赘述。
39、根据本技术的第四方面,提出了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现如上述技术方案中任一项的掘进设备的控制方法的步骤。
40、本技术提供的可读存储介质,其上存储有程序或指令,因该程序或指令被处理器执行时,能够实现如上述技术方案中任一项的掘进设备的控制方法,因此该可读存储介质具备上述掘进设备的控制方法的全部有益效果,在此不再赘述。
41、根据本技术的第五方面,提出了一种掘进设备,包括如上述第二方面提供的掘进设备的控制装置或如上述第三方面提供的掘进设备的控制装置。
42、本技术提供的掘进设备,包括如上述第二方面提供的掘进设备的控制装置或如上述第三方面提供的掘进设备的控制装置,因此该掘进设备具备上述掘进设备的控制装置的全部有益效果,在此不再赘述。
43、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!