全自动钻锚机器人的制作方法
本发明涉及一种全自动钻锚机器人,属于钻锚领域。
背景技术:
1、在煤矿开采领域,尤其是支护环节,由于环境恶劣,施工工艺复杂,导致支护环节仍然以人工为主。这对作业工人的安全健康造成负面影响,甚至威胁人员生命安全。
2、专利公告号cn111088990a公开了一种煤矿用全自动锚杆钻车,该全自动锚杆钻车能够实现移动、定位、铺网、钻孔、喷药、装杆及锚杆紧固的一系列操作,其支护效率及自动化程度较高,作业时间较短,在煤矿巷道快速掘进的研究中具备应用价值。
3、专利公告号cn108104853a公开了一种全自动化钻锚作业车,该钻锚车能够集铺锚网、钻锚孔、注锚固剂和安装锚杆工序于一体,可以完成巷道顶板锚网的自动化铺设及顶板、侧帮处锚杆的机械化及自动化支护,有效解决了当前掘支比例失衡的问题,对与掘进装备配套实现掘支锚的并行式作业提供价值支持。上述钻锚机器人(锚杆钻车)虽然都能提高支护质量和速度,且部分钻锚机械设备都能够集运网、铺网、顶网、护帮、打钻、上杆于一体,有效解决了掘支比例失衡的问题,对煤矿巷道的快速掘进提供了理论依据。但是,存在着钻锚机器人(锚杆钻车)设备系统整体结构庞大复杂,锚网支护仍需要人工辅助操作,其自动智能化程度需要进一步改善,且在锚杆支护作业过程中,钻锚一体装置的钻孔、锚固剂注入、换杆、装杆等操作过程繁琐,耗费的支护时间较长,在一定程度上不利于巷道快速掘进的实现。
4、同时由于山地区域环境恶劣,在进行现场作业时,不便安排较多的工作人员在场,但一些工程师需要在现场对钻孔操作进行指导,在钻机在山地中探索时,其路况、行程等信息都是不确定因素,且野外山地由于地形原因,信号很差,要想实施保证路线最优以及钻孔操作,需要采用无线网络传输进行信号交互,现有的行走机构存在行走不稳定,操作不方便的问题;对于钻锚领域所需的机械臂虽然存在一些多轴机械臂,但是大部分采用导轨支撑油缸推移的方式,调整维度少,作业时受限较多,不灵活。
5、基于现有技术的问题,缺少一种煤矿作业在井下采煤的全部工作过程都是机械化、连续性、系统性的作业且可以很大程度上降低人的劳动强度、提高工作效率、能更好的保障井下作业人员的生命财产安全的装置。
技术实现思路
1、为克服现有技术的缺陷,本发明提供一种全自动钻锚机器人的钻锚装置,本发明的技术方案是:
2、一种全自动钻锚机器人,包括行走部、传动部和工作部,该传动部的一端转动的安装在所的行走部上,并通过所的行走部驱动,该传动部的另一端安装有所述的工作部,所述的行走部包括车架、行走履带、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,在所述车架的两侧分别安装有所述的行走履带,两条所述的行走履带沿车架对称设置;在该车架前部的左侧安装有所述的左前行走支撑单元,右侧安装有所述的右前行走支撑单元,该左前行走支撑单元与所述的右前行支撑单元沿车架对称设置;在该车架后部的左侧安装有所述的左后行走支撑单元,右侧安装有所述的右后行走支撑单元,该左后行走支撑单元与所述的右后行支撑单元沿车架对称设置;当所述的左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元与地面接触时,所述的行走履带远离地面;在所述的车架上还安装有无线传输设备和智能感知系统,所述的行走履带、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元、无线传输设备以及智能感知系统均通过安装在车架上的控制箱控制。
3、所述的智能感知系统包括状态感知传感器和执行器,所述状态感知传感器用于实时获取环境状态的参数,并传输至控制箱;所述执行器用于对获取并执行控制箱下达的工作指令;所述无线传输设备用于远程控制终端与控制箱之间的信号连接及数据传输。
4、所述的左前行走支撑单元包括左前支撑关节、左前油缸连接座、左前支撑腿、左前支撑油缸和左前支撑脚垫,该左前支撑腿的一端通过左前支撑关转动的安装在所述的车架上,另一端安装有所述的左前支撑脚垫;所述的左前支撑油缸的缸体铰接在所述的左前支撑腿上,所述左前支撑油缸的活塞杆通过左前油缸连接座安装在所述的车架上,该左前支撑油缸的活塞杆与所述的左前油缸连接座铰接在一起;所述的左前支撑腿呈折弯状设置。
5、所述的右前行走支撑单元包括右前支撑关节、右前油缸连接座、右前支撑腿、右前支撑油缸和右前支撑脚垫,该右前支撑腿的一端通过右前支撑关节转动的安装在所述的车架上,另一端安装有所述的右前支撑脚垫;所述的右前支撑油缸的缸体铰接在所述的右前支撑腿上,所述右前支撑油缸的活塞杆通过右前油缸连接座安装在所述的车架上,该右前支撑油缸的活塞杆与所述的左前油缸连接座铰接在一起;所述的右前支撑腿呈折弯状设置。
6、所述的左后行走支撑单元包括左后支撑关节、左后油缸连接座、左后支撑腿、左后支撑油缸和左后支撑脚垫,该左后支撑腿的一端通过左后支撑关节转动的安装在所述的车架上,另一端安装有所述的左后支撑脚垫;所述的左后支撑油缸的缸体铰接在所述的左后支撑腿上,所述左后支撑油缸的活塞杆通过左后油缸连接座安装在所述的车架上,该左后支撑油缸的活塞杆与所述的左后油缸连接座铰接在一起;所述的左后支撑腿呈折弯状设置。
7、所述的右后行走支撑单元包括右后支撑关节、右后油缸连接座、右后支撑腿、右后支撑油缸和右后支撑脚垫,该右后支撑腿的一端通过右后支撑关节转动的安装在所述的车架上,另一端安装有所述的右后支撑脚垫;所述的右后支撑油缸的缸体铰接在所述的右后支撑腿上,所述右后支撑油缸的活塞杆通过右后油缸连接座安装在所述的车架上,该右后支撑油缸的活塞杆与所述的右后油缸连接座铰接在一起;所述的右后支撑腿呈折弯状设置。
8、所述的传动部包括前机械臂、后机械臂、第一旋转关节、第二旋转关节、第三旋转关节和组合关节,所述的后机械臂的一端的下部安装在所述的第一旋转关节上,该后机械臂的另一端的上部安装有所述的第二旋转关节,在该第二旋转关节上安装有前臂变幅油缸底座,该前臂变幅油缸底座整体呈z字型设置,该前机械臂的一端通过后铰接座转动的安装所述的前臂变幅油缸底座的上部,另一端的上部安装有所述的第三旋转关节,在所述的第三旋转关节上安装有所述的组合关节,前臂变幅油缸的缸体铰接在所述的前臂变幅油缸底座的下部,在所述后机械臂的下部设置有前铰接座,该前臂变幅油缸的活塞杆与所述的前铰接座铰接在一起。
9、所述的组合关节包括第四旋转关节和第五旋转关节,该第五旋转关节安装在所述第四旋转关节的上部,并与所述的第四旋转关节垂直设置。
10、所述的第一旋转关节、第二旋转关节和第三旋转关节、第四旋转关节和第五旋转关节的结构相同,均包括回转支撑、旋转盘和驱动马达,所述的旋转盘转动的安装在所述的回转支撑上,该旋转盘通过安装在回转支撑上的驱动马达驱动,所述的第一旋转关节、第二旋转关节和第三旋转关节的旋转面均沿x轴所在的平面进行旋转;所述的第四旋转关节沿z轴所在的平面旋转,所述的第五旋转关节沿y轴所在的平面旋转。
11、所述的工作部包括钻锚机架、上稳定器、下稳定器、主梁旋转器、上主梁旋转单元、下主梁旋转单元、第一钻机夹具和第二钻机夹具,在所述钻锚机架上转动的安装有沿竖直方向设置的主梁旋转器,在该主梁旋转器的上部安装有所述的上稳定器,下部安装有所述的下稳定器,该主梁旋转器的截面整体呈扇形设置;在所述主梁旋转器的一侧设置有供第一钻机上下移动的第一升降空间,另一侧设置有供第二钻机上下移动的第二升降空间;在接近所述主梁旋转器的上部区域处安装有驱动主梁旋转器旋转的上主梁旋转单元,在接近所述主梁旋转器的下部区域处安装有驱动主梁旋转器旋转的下主梁旋转单元,该下主梁旋转单元位于所述上主梁旋转单元的下部,与上主梁旋转单元相对应;该上主梁旋转单元以及下主梁旋转单元均通过支撑架安装在所述的钻锚机架上;在所述的钻锚机架上还安装有所述的锚杆输出单元和锚固剂输出单元,该锚杆输出单元与所述的主梁旋转器之间的钻锚机架上安装有输出锚杆机械臂底座,在该输出锚杆机械臂底座上安装有输出锚杆机械臂;该锚固剂输出单元与所述的主梁旋转器之间的钻锚机架上安装有输出锚固剂机械臂底座,在该输出锚固剂机械臂底座上安装有输出锚固剂机械臂;在所述主梁旋转器的上端安装有所述的第一钻机夹具和第二钻机夹具,该第一钻机夹具和第二钻机夹具之间形成夹角。
12、所述的第一钻机和第二钻机的结构相同,均包括转动驱动单元、升降驱动单元、转动驱动底座、升降驱动底座、输出轴底座、升降输入伞齿轴底座和连接板,在所述的连接板上,从上至下依次安装有所述的输出轴底座、转动驱动底座、升降驱动底座和升降输入伞齿轴底座,所述的输出轴底座与转动驱动底座之间形成间距,该转动驱动底座与升降驱动底座之间形成间距,所述的升降驱动底座和升降输入伞齿轴底座之间形成间距;所述的转动驱动单元固定安装在所述的转动驱动底座上,该升降驱动单元固定安装在所述的升降驱动底座上。
13、所述的转动驱动单元包括转动伺服电机,所述的转动伺服电机固定安装在所述的转动驱动底座上,在该转动伺服电机的电机轴上通过花键安装有第一同步带轮,在所述的转动驱动底座上安装有第二同步带轮,所述的第一同步带轮与第二同步带轮通过同步带传动连接,在所述的第二同步带轮上通过花键安装有第三同步带轮,该第三同步带轮与所述的第二同步带轮同轴设置;在所述的输出轴底座上转动的安装有输出轴,在所述的输出轴上安装有第四同步带轮,该第四同步带轮与第三同步带轮通过同步带传动连接;该输出轴的外端穿过所述的输出轴底座。
14、所述的升降驱动单元包括升降伺服电机,所述的升降伺服电机固定安装在所述的升降驱动底座上,在所述升降伺服电机的电机轴上通过花键安装有第五同步带轮,在所述的升降驱动底座上转动的安装有第六同步带轮,该第六同步带轮与所述的第五同步带轮通过同步带传动连接;在所述的第六同步带轮上通过花键安装有第七同步带轮,该第七同步带轮与第六同步带轮同轴设置;升降输入伞齿轴转动的安装在所述的升降输入伞齿轴底座和升降驱动底座上,在该升降输入伞齿轴上安装有第八同步带轮,该第八同步带轮与第七同步带轮之间通过同步带传动连接,该升降输入伞齿轴的一端穿过所述的升降驱动底座后形成主动伞齿面;升降传动轴转动的安装所述的连接板上,并与所述的连接板垂直设置;所述的升降传动轴与连接板之间安装有防止升降传动轴窜动的定位卡簧;在所述的升降传动轴的一端安装有与主动伞齿面相啮合的从动伞齿轮,另一端穿过所述的连接板后安装有升降齿轮,该升降齿轮与设置在第一升降空间或者第二升降空间上的升降齿条相啮合;所述的连接板上还安装有升降导向单元。
15、所述的升降导向单元包括第一升降导向轮、第二升降导向轮、第三升降导向轮、第四升降导向轮和第五升降导向轮,所述的第一升降导向轮和第二升降导向轮安装在所述连接板的上部;所述的第四升降导向轮和第五升降导向轮安装在所述连接板的下部,所述的第三升降导向轮安装在所述连接板的中部;所述的第一升降导向轮和第四升降导向轮的连线沿竖直方向设置,均与所述主梁旋转器的一侧面凸起滚动配合;所述的第二升降导向轮、第三升降导向轮和第五升降导向轮的连线沿竖直方向设置,均与所述主梁旋转器的另一侧面凸起滚动配合。
16、所述的上主梁旋转单元包括上主梁旋转齿座、第一上主梁旋转齿圈、第二上主梁旋转齿圈、上主梁旋转伺服电机底座、第一上主梁旋转伺服电机和第二上主梁旋转伺服电机,在所述的主梁旋转器上设置有第一弧形连接部和第二弧形连接部,该第二弧形连接部的一端与第一弧形连接部的一端之间形成所述的第一升降空间;该第二弧形连接部的另一端与第一弧形连接部的另一端之间形成所述的第二升降空间;在所述的第一弧形连接部上固定安装有第一上主梁旋转齿圈,在所述的第二弧形连接部上固定安装有第二上主梁旋转齿圈;所述的第一上主梁旋转齿圈和第二上主梁旋转齿圈均嵌入所述的上主梁旋转齿座的转动槽内,并与所述的转动槽转动配合;在所述的上主梁旋转齿座上安装有上主梁旋转伺服电机底座;该上主梁旋转伺服电机底座上安装有第一上主梁旋转伺服电机和第二上主梁旋转伺服电机,在所述的第一上主梁旋转伺服电机的电机轴上安装有与第一上主梁旋转齿圈啮合的第一上旋转齿轮;在所述的第二上主梁旋转伺服电机的电机轴上安装有与第二上主梁旋转齿圈啮合的第二上旋转齿轮。
17、所述的下主梁旋转单元包括下主梁旋转齿座、第一下主梁旋转齿圈、第二下主梁旋转齿圈、下主梁旋转伺服电机底座、第一下主梁旋转伺服电机和第二下主梁旋转伺服电机,在所述的第一弧形连接部上固定安装有第一下主梁旋转齿圈,在所述的第二弧形连接部上固定安装有第二下主梁旋转齿圈;所述的第一下主梁旋转齿圈和第二上主梁旋转齿圈均嵌入所述的下主梁旋转齿座的转动槽内,并与所述的转动槽转动配合;在所述的下主梁旋转齿座上安装有下主梁旋转伺服电机底座;该下主梁旋转伺服电机底座上安装有第一下主梁旋转伺服电机和第二下主梁旋转伺服电机,在所述的第一下主梁旋转伺服电机的电机轴上安装有与第一下主梁旋转齿圈啮合的第一下旋转齿轮;在所述的第二下主梁旋转伺服电机的电机轴上安装有与第二下主梁旋转齿圈啮合的第二下旋转齿轮;所述的第一上主梁旋转伺服电机、第二上主梁旋转伺服电机、第一下主梁旋转伺服电机和第二下主梁旋转伺服电机同步运行。
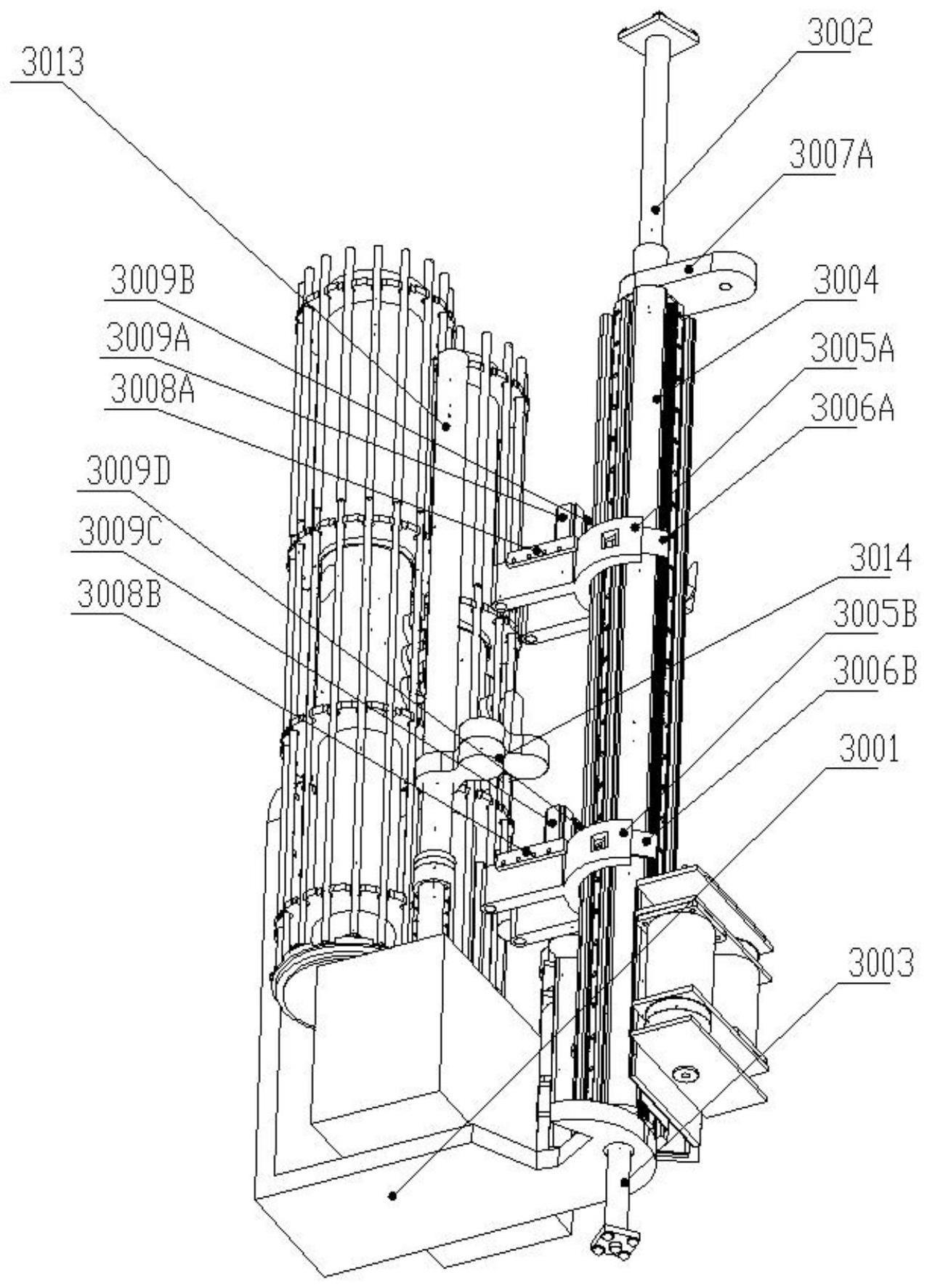
18、所述锚杆输出单元和锚固剂输出单元的结构相同,均包括固定架、伺服电机底座、上外壳、下外壳、上固定盘、中上固定盘、中下固定盘和下固定盘,在所述伺服电机底座的下部安装有沿竖直方向设置的旋转伺服电机,该伺服电机底座的上部固定安装有所述的固定架,所述的上外壳通过第一上圆锥滚子轴承和第二上圆锥滚子轴承转动的安装在所述的固定架上,该第一上圆锥滚子轴承位于第二上圆锥滚子轴承的上部;所述的下外壳通过第一下圆锥滚子轴承和第二下圆锥滚子轴承转动的安装在所述的固定架上,该第一下圆锥滚子轴承位于第二下圆锥滚子轴承的上部;伺服电机传动轴依次穿过所述的下外壳和上外壳,并通过所述的旋转伺服电机驱动;所述的伺服电机传动轴与上外壳之间安装有上深沟球轴承,所述的伺服电机传动轴与下外壳之间安装有下深沟球轴承;该伺服电机传动轴的下部安装有与下外壳的内齿面相啮合的下驱动齿轮;该伺服电机传动轴的上部安装有与上外壳的内齿面相啮合的上驱动齿轮;在所述上外壳的外部从上至下依次固定安装有顶盘、上固定盘和中上固定盘;在所述下外壳的外部从上至下依次安装有所述的中下固定盘、下固定盘和底部固定盘,在所述顶盘、上固定盘、中上固定盘、中下固定盘、下固定盘和底部固定盘的圆周方向上设置有数个固定锚杆或者锚固剂的卡槽;在所述中上固定盘和中下固定盘之间的固定架上固定安装有工件输出单元。
19、所述的工件输出单元包括移动油缸、卡爪、上卡爪伸缩导向筒和下卡爪伸缩导向筒,所述的移动油缸、上卡爪伸缩导向筒和下卡爪伸缩导向筒均沿固定架的径向设置;在该移动油缸的上部设置有所述的上卡爪伸缩导向筒,下部设置有所述的下卡爪伸缩导向筒,该卡爪沿竖直方向设置,所述卡爪的上端连接在所述的上卡爪伸缩导向筒上,下端连接在所述的下卡爪伸缩导向筒上;在所述移动油缸的伸缩杆上安装有顶杆,该顶杆上设置有用于顶出锚杆或者锚固剂的顶杆弧形槽,在所述的卡爪上设置有卡爪夹持槽,该顶杆弧形槽与所述的卡爪夹持槽之间形成工件夹持的空间。
20、本发明的优点是:
21、1、狭长的结构便于通过狭窄地点,比如从掘进机旁边行走到掘进机前面等等。
22、2、车架上设有左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,能够保证复杂环境车架稳定。
23、3、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,可以独立动作,能够保证在坡度较大工作地点调整车身达到平衡稳定状态。
24、4、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元的设置,能够保证钻机伸展到比较远的时候车身稳定,增加钻机作业面积。
25、5、通过第一旋转关节、第二旋转关节和第三旋转关节实现沿x轴所在的平面进行旋转;通过第四旋转关节沿z轴所在的平面旋转,第五旋转关节沿y轴所在的平面旋转;组合关节在使用时通过螺栓连接钻锚机机身,组合关节两向的调整,使钻锚机身产生两轴运动;前臂变幅油缸工作时驱动前机械臂上下移动,实现了多方位移动,运动范围广,可到达位置更精准。
26、6、优化了巷道的钻孔作业,满足井下巷道的快速支护要求;使钻进与锚杆锚固于一体,实现了锚杆的自动化装填,使巷道一次性成型,大大减少了传统巷道掘进过程中支护所占的时间,提高了巷道整体的掘进效率,有效保障了工人的生命健康安全,有效解决了巷道支护存在的效率低、钻锚作业繁琐等问题,在巷道的快速掘进中具有广阔的市场前景。
- 还没有人留言评论。精彩留言会获得点赞!