一种智能行进的钻孔窥视设备及其使用方法
本发明涉及钻孔窥视,具体的说,涉及一种智能行进的钻孔窥视设备及其使用方法。
背景技术:
1、目前,现有的钻孔窥视设备是将窥视探头安装在探杆的顶部,通过提升探杆控制窥视探头进入的深度和行进速度。一项钻孔窥视工作的完成至少需要3个工作人员,且在随着探杆长度的增加,探杆的重量也逐渐增大,作业人员体力消耗大。人工控制探头行进速度存在探测速度不稳定问题,容易导致局部成像视频模糊失真,使得图像分析人员对岩层的地质及构造情况产生误判。此外,目前钻孔窥视的深度依赖于传输电缆带动滑轮的转动量进行换算,但实际探测工程中电缆线难以完全贴合探杆,导致记录的探测长度与探头在钻孔里实际的行进距离不同,产生较大误差。
2、由上述分析可知,现有的钻孔窥视装备及技术智能化水平低、人工作业强度大、成像清晰度不稳定、窥视深度记录不准确,影响了岩层探测的精度和效率。
技术实现思路
1、本发明的目的是提供一种智能行进的钻孔窥视设备及其使用方法,本发明解决了现有钻孔窥视设备对智能化水平低、人工作业强度大、钻孔探测深度不准确以及部分成像模糊失真的问题。
2、为实现上述目的,本发明采用如下技术方案:
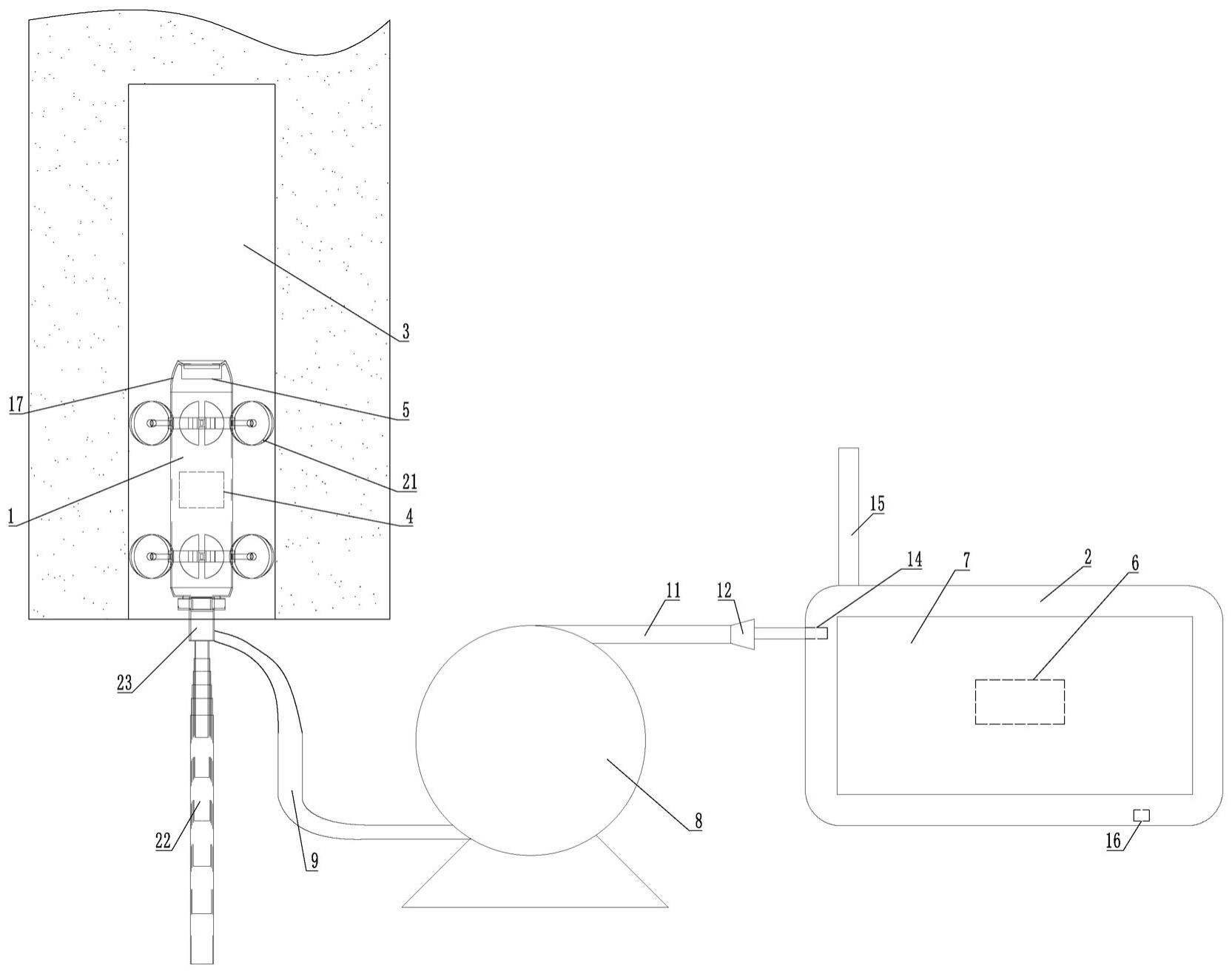
3、一种智能行进的钻孔窥视设备,包括智能窥视探头和智慧平台,智能窥视探头为直径小于钻孔内径的长筒型结构,智能窥视探头内置有智导设备,智能窥视探头头端设置有摄像头,智能窥视探头上安装有自行走机构,智导设备分别与摄像头和自行走机构信号连接,智慧平台内置有智行处理器,智慧平台上设置有含操作系统的成像器,智行处理器分别与智导设备和成像器信号连接。
4、该智能行进的钻孔窥视设备还包括绞车,绞车的卷筒上卷绕有第一电缆线,第一电缆线的一端从绞车的卷筒上放卷出来并连接有传信接头,第一电缆线的另一端同轴固定连接在绞车的卷筒左端或右端中心并通过导电滑环连接有第二电缆线,第二电缆线的另一端连接有信号波动器,智能窥视探头尾端中心设置有与智导设备信号连接的第一传信接口,传信接头与第一传信接口可拆卸匹配连接,智慧平台侧部设置有与智行处理器信号连接的第二传信接口,信号波动器与第二传信接口可拆卸匹配连接,智慧平台上还安装有与智行处理器信号连接的信号发射接收天线和发声装置,第二传信接口、信号波动器、第二电缆线、第一电缆线、传信接头和第一传信接口依次串联构成通信线缆,智行处理器通过通信线缆或信号发射接收天线与智导设备信号连接。
5、智能窥视探头头端还安装有罩在摄像头前部且开有中心孔的防尘密封帽,防尘密封帽的中心孔前端部内圆设有环形探灯,智导设备与环形探灯信号连接。
6、自行走机构沿智能窥视探头轴向间隔且前后对称设置有两套,每套自行走机构均包括一个内置于智能窥视探头内部的智能驱动机,智能窥视探头上围绕智能驱动机圆周阵列设置有若干个压力调节杆,压力调节杆沿智能窥视探头径向设置,压力调节杆为电动伸缩杆,压力调节杆的缸体固定嵌设在智能窥视探头内,压力调节杆的伸缩杆向外伸出智能窥视探头,压力调节杆的伸缩杆外端转动安装有带轮胎的球形压轮,球形压轮的轮毂内设置有胎压监测传感器和圈数计数器,智能驱动机通过电机驱动机构驱动各个球形压轮转动,智导设备分别与智能驱动机、各个胎压监测传感器和各个圈数计数器信号连接。
7、该智能行进的钻孔窥视设备还包括一个轻型空心伸缩探杆,轻型空心伸缩探杆由六节直径逐级递减的空心杆件制成,轻型空心伸缩探杆的最外一节空心杆件伸出端固定连接有快接卡头,智能窥视探头尾端偏心部设有与快接卡头匹配连接的卡槽。
8、一种智能行进的钻孔窥视设备的使用方法,具体包括以下步骤:
9、(a)、作业人员将智能窥视探头、绞车和智慧平台置于待窥视的钻孔前,将智能窥视探头、绞车和智慧平台连接后接通电源,启动智能窥视探头和智慧平台;
10、(b)、在智慧平台中输入钻孔信息,使用轻型空心伸缩探杆将智能窥视探头送入钻孔中;
11、(c)、智导设备通过各个胎压监测传感器控制各个压力调节杆的活塞杆自动伸出,使各个球形压轮紧压贴合钻孔内壁,直至各个胎压监测传感器监测的胎压值达到标准气压,再将轻型空心伸缩探杆收回;
12、(d)、在智慧平台中输入启动命令,控制智能窥视探头通过自行走机构在钻孔中智能行进,智能窥视探头对钻孔内部进行拍摄;
13、(e)、智行处理器对智能窥视探头传回的数据进行数字化、可视化处理,在成像器中显示图像信息;
14、(f)、在智慧平台中输入召回命令,控制智能窥视探头通过自行走机构反向行进至钻孔孔口处,再使用轻型空心伸缩探杆将智能窥视探头从钻孔中取出,将智能窥视探头、绞车和智慧平台断开连接;
15、(g)、再将智能窥视探头、绞车和智慧平台移动至下一个待窥视的钻孔前,重复步骤(a)~(f)完成对下一个钻孔的拍摄。
16、步骤(a)具体为:作业人员将智能窥视探头、绞车和智慧平台置于待窥视的钻孔前,然后将传信接头连接在第一传信接口,信号导波器连接在第二传信接口,便将智能窥视探头、绞车和智慧平台进行了连接,第二传信接口、信号波动器、第二电缆线、第一电缆线、传信接头和第一传信接口依次串联构成通信线缆,智行处理器通过通信线缆或信号发射接收天线与智导设备信号连接,再将智能窥视探头、绞车和智慧平台接通电源,启动智能窥视探头和智慧平台。
17、步骤(b)具体为:作业人员在成像器中的操作系统手动输入钻孔直径,将快接卡头伸入到卡槽中,顺时针旋转轻型空心伸缩探杆,使快接卡头卡接固定在卡槽中,进而使轻型空心伸缩探杆与智能窥视探头尾端固定连接,作业人员手动伸长轻型空心伸缩探杆,将智能窥视探头送入钻孔中,使智能窥视探头的尾端靠近钻孔所在面10cm左右处。
18、步骤(c)具体为:智导设备启动自动识别功能,智导设备通过各个胎压监测传感器的数值控制各个压力调节杆的活塞杆自动伸出,使各个球形压轮紧压贴合钻孔内壁,直至各个胎压监测传感器监测的胎压值达到标准气压,则智能窥视探头即可通过各个球形压轮支撑在钻孔内,然后,作业人员逆时针旋转轻型空心伸缩探杆,使快接卡头脱离卡槽,进而使轻型空心伸缩探杆与智能窥视探头尾端脱离,作业人员手动收缩轻型空心伸缩探杆,将轻型空心伸缩探杆收回。
19、步骤(d)具体为:作业人员在成像器中的操作系统上输入启动命令,智行处理器处理启动命令信息后将行进指令通过通信线缆或信号发射接收天线发送给智导设备,智导设备根据行进指令控制两个智能驱动机通过相应电机驱动机构分别驱动相应各个球形压轮以可靠的行进速度前进,使智能窥视探头带动第一电缆线在钻孔中智能行进,绞车按照智能窥视探头的行进速度将第一电缆线从绞车的卷筒上放卷出来,智导设备收集各个圈数计数器读出的相应各个球形压轮的转动圈数来计算智能窥视探头在钻孔内行进深度,同时智导设备开启摄像头和环形探灯,摄像头对钻孔内壁进行拍摄,其中,智能驱动机通过智行处理器的信号传递以及对球形压轮转动量的计算,实现对智能窥视探头的行进速度控制,通过智导设备的辅助计算,准确控制智能窥视探头的行进速度,保证摄像头始终保持正常工作且成像清晰不失真;
20、步骤(e)具体为:摄像头将拍摄到的钻孔内壁图像数据传给智导设备,智导设备对钻孔内壁图像数据进行数字化处理并通过通信线缆传回给智行处理器,智行处理器自动对钻孔内壁图像优化处理,将优化后的钻孔内壁图像显示在成像器上,图像分析人员通过成像器上显示的钻孔内壁图像准确判断钻孔内壁的地质构造;
21、步骤(f)具体为:智能窥视探头行进至钻孔孔底时,即可完成对该钻孔的拍摄,智行处理器控制发声装置发出报警,然后,作业人员在成像器中的操作系统上输入召回命令,则智行处理器处理召回命令信息后将返回指令通过通信线缆或信号发射接收天线发送给智导设备,智导设备根据返回指令控制两个智能驱动机通过相应电机驱动机构分别驱动相应各个球形压轮反向行进,使智能窥视探头在钻孔中反向行进,同时绞车按照智能窥视探头的行进速度将第一电缆线收卷到绞车的卷筒上,当智能窥视探头行进至钻孔孔口处时,两个智能驱动机停止工作,作业人员手动伸长轻型空心伸缩探杆,将快接卡头伸入到卡槽中,顺时针旋转轻型空心伸缩探杆,使快接卡头卡接固定在卡槽中,进而使轻型空心伸缩探杆与智能窥视探头尾端固定连接,作业人员手动收缩轻型空心伸缩探杆,将智能窥视探头从钻孔中取出,然后将传信接头脱离第一传信接口,信号导波器脱离第二传信接口,便将智能窥视探头、绞车和智慧平台断开连接。
22、本发明相对现有技术具有突出的实质性特点和显著的进步,具体地说,本发明可以实现对钻孔内壁未知岩层的准确探测以及数字化、可视化和智能化处理;采用智能驱动机驱动球形压轮,实现了智能窥视探头在钻孔内壁自主行进,解放了劳动力,解决了探杆逐渐加长、加重使得人工强度增加的问题;智能驱动机通过智导设备收集处理的数据以及智慧平台输入的命令,准确计算出智能窥视探头的行进速度,进而准确控制智能窥视探头的行进速度,保证摄像头始终保持正常工作且成像清晰不失真,解决了人工控制探杆行进速度不均匀造成成像模糊失真的问题;智行处理器与智导设备对数据的采集与智能分析,显著提高了现有钻孔窥视技术的智能化水平。
- 还没有人留言评论。精彩留言会获得点赞!