一种矿用门式支架履带搬运机器人及其搬运方法
本发明属于机器人,尤其涉及一种矿用门式支架履带搬运机器人及其搬运方法。
背景技术:
1、矿用门式支架属于一种新型的用于巷道临时加强支护的巷道支架,对巷道断面和形状有很强的适应性,但由于门式支架自身非支承状态不能站立,升降移动需要外部辅助,在矿山一直未得到推广应用,为此,需要针对门式支架升降移动特点开发一种能够辅助门式支架升降、移动、旋转的装置,由于矿山巷道断面普遍较小,加上门式支架支护又占用空间,该装置结构要紧凑、外形尺寸要小,便于在狭小的空间通过,且能够实现自动控制。
2、通过上述分析,现有技术存在的问题及缺陷为:现有技术辅助门式支架升降、移动、旋转的装置结构体积大,在狭小的空间运动通过人工操控难度大,容易发生碰撞,不安全,而且不能自动就位,不能准确抓举并升降旋转门式支架。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种矿用门式支架履带搬运机器人及其搬运方法。
2、所述技术方案如下:矿用门式支架履带搬运机器人,由动力驱动单元、履带行走单元、机械手单元、控制单元、无线控制器、基于视角的机器人环境交互系统组成;
3、动力驱动单元,固定于履带行走单元上面,用于给机器人提供动力,驱动履带行走单元和机械手单元;
4、履带行走单元,用于来回搬运门式支架;
5、机械手单元,用于伸缩旋转带动门式支架升降旋转,进行垂直升降、水平旋转及自动抓举;
6、控制单元,用于机器人手动操控;
7、无线控制器,用于无线操控机器人;
8、基于视角的机器人环境交互系统,基于机器人两侧摄像头获得的图像,通过图像识别获得机器人与巷道支架间的距离,通过控制软件控制机器人居中行走,基于顶部摄像头图像获得待移动支架与机器人的相对位置关系,使机器人自动定位,实施抓举并升降旋转门式支架。
9、进一步,所述动力驱动单元包括:采用矿用柴油动力、矿用蓄电池动力或矿用锂电池动力的动力系统和泵站液压系统。
10、进一步,所述履带行走单元由履带总成和机车底盘组成,机车底盘位于履带总成上。
11、进一步,所述机械手单元垂直固定于履带行走单元的机车底盘中央,由伸缩机构、旋转机构、抓举机构组成;
12、旋转机构位于伸缩机构的底部或顶部,抓举机构位于机械手顶部,抓举机构直接抓举门式支架顶梁中部。
13、进一步,所述动力驱动单元、控制单元布置于机械手单元的周围;
14、所述控制单元由电控箱、液压阀组控制系统及其管线系统组成;
15、所述电控箱由接线端子、控制器、继电器、断路器、感应器、plc组成。
16、进一步,所述无线控制器包括远程无线控制台和/或手持无线控制器;
17、所述远程无线控制台和/或手持无线控制器分别由显示器和控制面板组成。
18、进一步,所述伸缩机构由伸缩千斤顶、外伸缩臂、内伸缩臂组成,外伸缩臂、内伸缩臂固定于履带行走单元上,伸缩千斤顶杆体端铰接在履带行走单元上,伸缩千斤顶缸体端铰接于外伸缩臂或内伸缩臂上;外伸缩臂或内伸缩臂的下端固定在履带行走单元上。
19、进一步,所述抓举机构垂直于伸缩机构设置,由托梁和上部的用于卡住门式支架顶梁的导向限位挡板组成,通过导向限位挡板实现机械手对门式支架的自动抓举,托梁长度大于履带行走单元的机车底盘走向长度,托梁两端的下部设有吊环用于吊运除门式支架以外的物件。
20、本发明的另一目的在于提供一种搬运门式支架的方法,该方法利用所述的矿用门式支架履带搬运机器人进行搬运,该方法包括:
21、基于机器人两侧摄像头获得的图像,通过图像识别获得机器人与巷道支架间的距离,通过控制软件基于两侧等距控制机器人居中行走,基于顶部摄像头图像获得待移动支架与机器人的相对位置关系,使机器人自动就位,实施抓举并升降旋转门式支架。
22、进一步,所述矿用门式支架履带搬运机器人在物流、智能生产线领域搬运物体上进行应用。
23、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明矿用门式支架履带搬运机器人动力驱动单元、控制单元布置于垂直升降的机械手单元的周围,结构紧凑,能够辅助门式支架升降、旋转,并从门式支架支护的狭小空间将门式支架从支护区的后端搬运至前端,基于视角的机器人环境交互控制系统可以控制机器人居中行走、自动定位,可以准确抓举、升降旋转及搬运门式支架。现有技术提供了一些机器人其动作和功能,但作为门式支架搬运机器人本发明在该行业内首次进行提出。
技术特征:
1.一种矿用门式支架履带搬运机器人,其特征在于,该矿用门式支架履带搬运机器人由动力驱动单元(1)、履带行走单元(2)、机械手单元(3)、控制单元(4)、无线控制器(5)、基于视角的机器人环境交互系统组成;
2.根据权利要求1所述的矿用门式支架履带搬运机器人,其特征在于,所述动力驱动单元(1)包括:采用矿用柴油动力、矿用蓄电池动力或矿用锂电池动力的动力系统(1-1)和泵站液压系统(1-2)。
3.根据权利要求1所述的矿用门式支架履带搬运机器人,其特征在于,所述履带行走单元(2)由履带总成(2-1)和机车底盘(2-2)组成,机车底盘(2-2)位于履带总成(2-1)上。
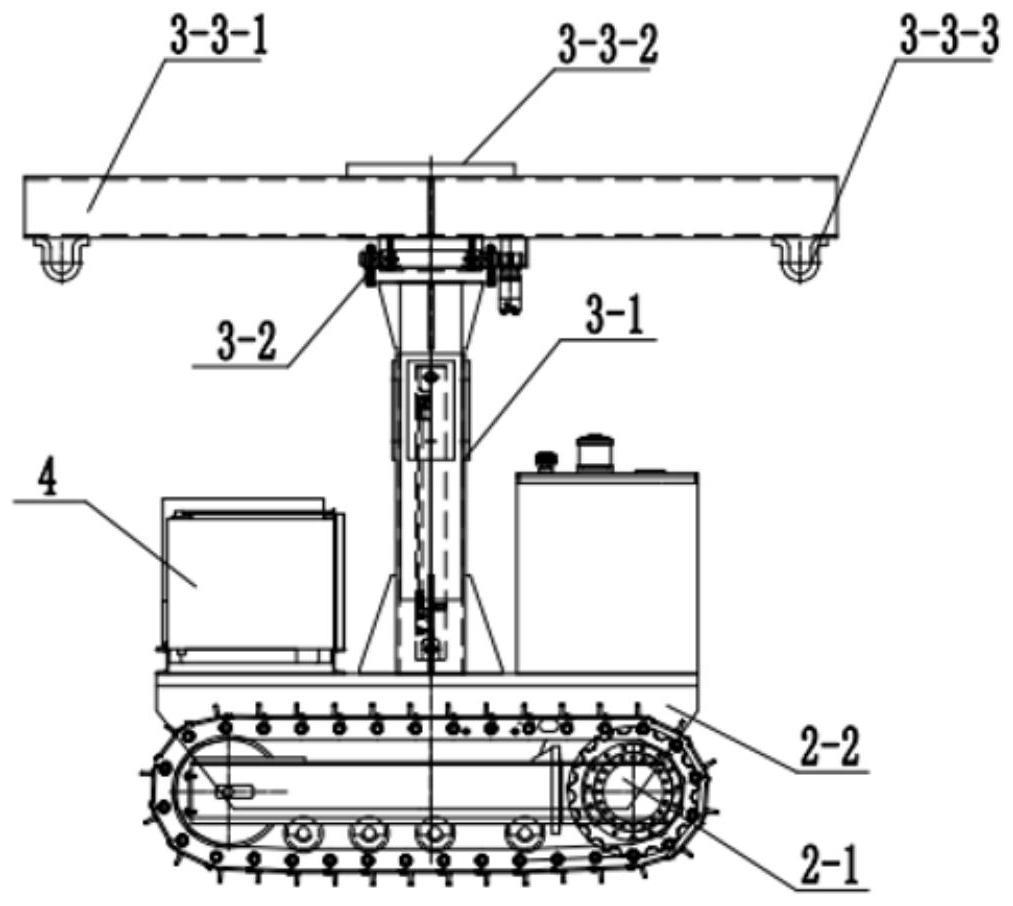
4.根据权利要求1所述的矿用门式支架履带搬运机器人,其特征在于,所述机械手单元(3)垂直固定于履带行走单元(2)的机车底盘(2-2)中央,由伸缩机构(3-1)、旋转机构(3-2)、抓举机构(3-3)组成;
5.根据权利要求1所述的矿用门式支架履带搬运机器人,其特征在于,所述动力驱动单元(1)、控制单元(4)布置于机械手单元(3)的周围;
6.根据权利要求1所述的矿用门式支架履带搬运机器人,其特征在于,所述无线控制器(5)包括远程无线控制台(5-1)和/或手持无线控制器(5-2);
7.根据权利要求4所述的矿用门式支架履带搬运机器人,其特征在于,所述伸缩机构(3-1)由伸缩千斤顶(3-1-1)、外伸缩臂(3-1-2)、内伸缩臂(3-1-3)组成,外伸缩臂(3-1-2)、内伸缩臂(3-1-3)固定于履带行走单元(2)上,伸缩千斤顶(3-1-1)杆体端铰接在履带行走单元(2)上,伸缩千斤顶(3-1-1)缸体端铰接于外伸缩臂(3-1-2)或内伸缩臂(3-1-3)上;外伸缩臂(3-1-2)或内伸缩臂(3-1-3)的下端固定在履带行走单元(2)上。
8.根据权利要求4所述的矿用门式支架履带搬运机器人,其特征在于,所述抓举机构(3-3)垂直于伸缩机构(3-1)设置,由托梁(3-3-1)和上部的用于卡住门式支架顶梁的导向限位挡板(3-3-2)组成,通过导向限位挡板(3-3-2)实现机械手对门式支架的自动抓举,托梁(3-3-1)长度大于履带行走单元(2)的机车底盘(2-2)走向长度,托梁(3-3-1)两端的下部设有吊环(3-3-3)用于吊运除门式支架以外的物件。
9.一种搬运门式支架的方法,其特征在于,该方法利用权利要求1-8任意一项所述的矿用门式支架履带搬运机器人进行搬运,该方法包括:
10.根据权利要求9所述的搬运门式支架的方法,其特征在于,所述矿用门式支架履带搬运机器人在物流、智能生产线领域搬运物体上进行应用。
技术总结
本发明属于机器人技术领域,公开了一种矿用门式支架履带搬运机器人及其搬运方法。该机器人包括:履带行走单元用于来回搬运门式支架;机械手单元用于伸缩旋转带动门式支架升降旋转;基于视角的机器人环境交互系统用于基于机器人两侧摄像头获得的图像,通过图像识别获得机器人与巷道支架间的距离,通过控制软件基于两侧等距控制机器人居中行走,基于顶部摄像头图像获得待移动支架与机器人的相对位置关系,使机器人自动定位,实施抓举并升降旋转门式支架。
技术研发人员:翟明华,王振朋,胡善超
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!