一种潜入式星壤掘进机器人
本发明涉及星壤掘进机器人,更具体地,涉及一种潜入式星壤掘进机器人。
背景技术:
1、自古以来,太空就是人类一直向往并不断追求的一片未知世界。从人类开始执行太空取样作业的任务至今,已经取得了丰硕的成果。比如苏联“luna”系列探测器,美国的“apollo”登月任务,日本的“隼鸟号”探测器,欧洲的火星快车公司研究的“比格尔号”探测器,我国的“嫦娥五号”探测器等,它们都成功地从地外行星上采样品返回。从现有技术来看,各个国家的钻探机器人都以螺旋式钻杆为主要功能部件来开展,但与此同时螺旋式钻进的方式随着钻进深度的加深,摩擦力会急剧增大,使得钻进深度有限。
2、现有技术公开了一种星壤掘进机器人,包括用于星壤挖掘的挖掘机构与用于驱动挖掘机构前移的且可根据井壁进行尺寸调整的推移机构,所述推移机构的包络半径大于或等于所述挖掘机构的包络半径,挖掘机构设于推移机构前端;推移机构包括支撑架、链条传动装置、用于带动链条传动装置运动的驱动装置,链条传动装置、驱动装置均装设在所述支撑架上。该方案中,通过驱动装置驱动链条传动装置进行推进,由于链条宽度过于短窄,与井壁接触面积小,所能提供的压力是极其有限的,同时星壤的颗粒直径小,容易陷入链条之中,增大链条摩擦力的同时加剧了链条的磨损,实际上反而使得机器人无法实现掘进目的。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种潜入式星壤掘进机器人,利用推移机构向挖掘机构提供钻压力的过程中,增大推移机构与井壁的接触面积,防止推移过程中对推移机构的磨损导致无法掘进,确保推移机构行进稳定。
2、为解决上述技术问题,本发明采用的技术方案是:
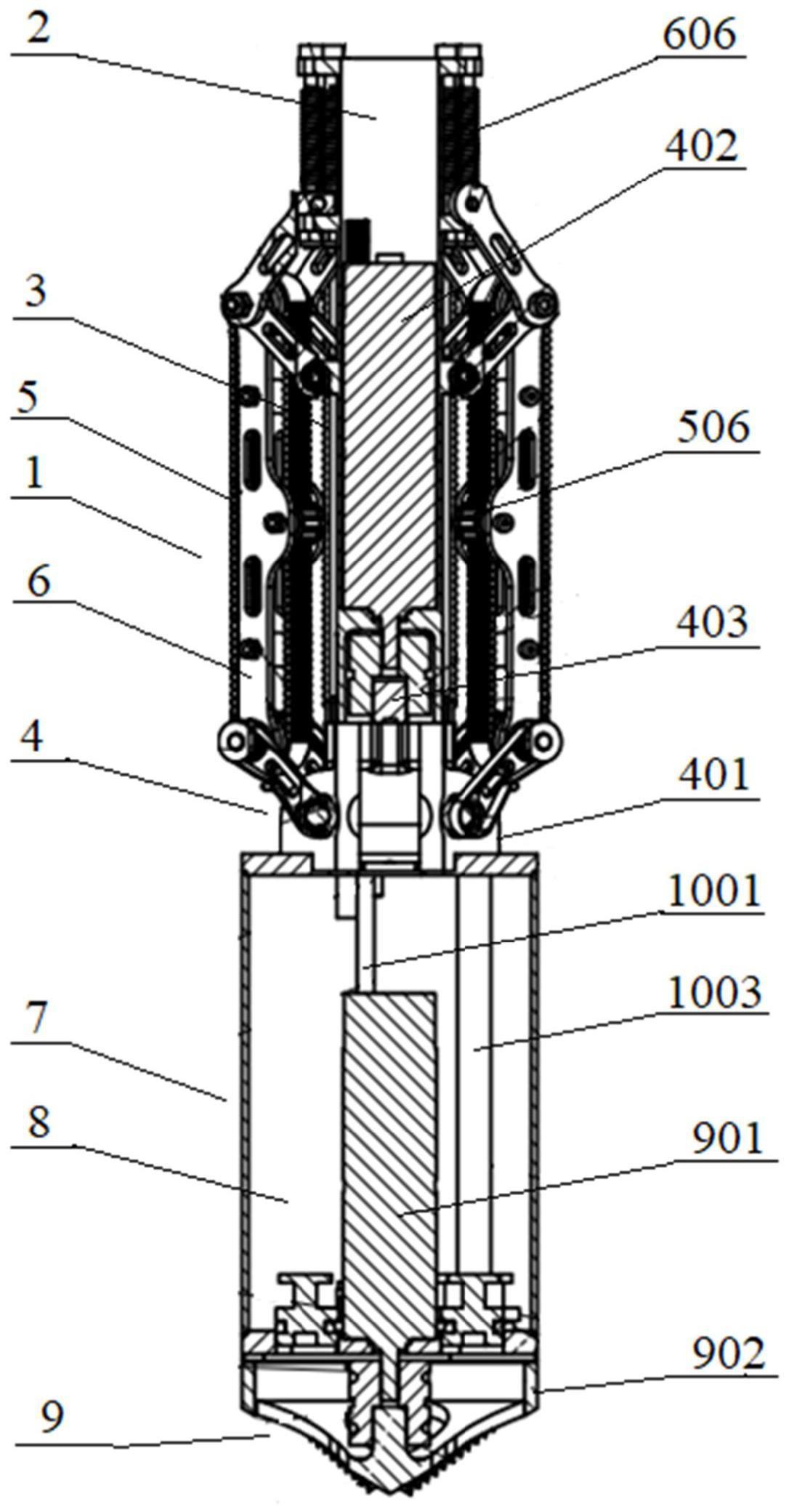
3、提供一种潜入式星壤掘进机器人,包括挖掘机构和可根据井壁进行尺寸调整的推移机构,所述推移机构的包络半径大于所述挖掘机构的包络半径,所述挖掘机构位于所述推移机构的底部;所述推移机构包括支撑架、驱动装置、若干履带传动装置和若干自适应结构,所述支撑架的底部与所述挖掘机构连接,所述驱动装置装设于所述支撑架,所述驱动装置的输出端与所述履带传动装置传动连接,若干所述自适应结构沿着所述支撑架的圆周布置,所述履带传动装置装设于所述自适应结构,所述自适应结构用于调整所述履带传动装置与所述支撑架之间的距离。
4、本发明的潜入式星壤掘进机器人,利用挖掘机构挖掘星壤,推移机构用于驱动挖掘机构前移,使用时,通过支撑架对推移机构进行支撑,通过驱动装置驱动履带传动装置,履带传动装置作用于井壁实现推移作用,进而向挖掘机构提供钻压力,其中,履带传动装置增大推移机构与井壁的接触面积,有效保持工作的稳定性,同时提高了利用井壁对推移机构的摩擦力所能提供给挖掘机构钻进的动力,提高了机器人深入钻进的钻压能力;同时,通过自适应结构可自动调节履带传动装置于支撑架的距离,保持履带传动装置与井壁压紧,使推移机构达到自适应的功能。
5、进一步地,每个所述自适应结构包括第一连接杆、第二连接杆和若干固定连杆,所述固定连杆的两端分别与所述第一连接杆的一端、第二连接杆的一端铰接,所述第一连接杆的另一端、第二连接杆的另一端分别铰接于所述支撑架,所述第一连接杆、固定连杆、第二连接杆与所述支撑架构成平行四边形机构,所述履带传动装置装设于所述固定连杆。
6、进一步地,所述自适应结构还包括第三连接杆、挡板、弹簧,第一平台和第二平台,所述第一平台和第二平台沿着所述支撑架的长度方向间隔设置,所述挡板套设于所述第一平台与所述第二平台之间的支撑架,所述第一平台、挡板与所述第二平台通过第一连接件顺次连接,所述弹簧缠绕所述第一连接件,且所述弹簧的两端分别连接于所述第一平台和所述挡板,所述第三连接杆的一端与所述第二连接杆的一端铰接,所述第三连接杆的另一端与所述挡板铰接。
7、进一步地,每个所述履带传动装置包括第一同步带轮、第二同步带轮、第一履带、第一连接轴和第二连接轴,所述驱动装置的输出端与所述第一连接轴连接,所述第一同步带轮、第一连接杆的一端、固定连杆的一端装设于所述第一连接轴,所述第二同步带轮、第二连接杆的一端、固定连杆的另一端装设于所述第二连接轴,所述第一履带缠绕所述第一同步带轮和第二同步带轮。
8、进一步地,所述驱动装置包括齿轮架、推移电机、主动轴、主动斜齿轮、若干从动轴和若干从动斜齿轮,所述齿轮架顶部与所述支撑架连接,所述齿轮架底部与所述挖掘机构连接,若干所述从动轴转动设置于所述齿轮架的圆周,所述推移电机装设于所述支撑架,所述推移电机的输出轴与所述主动轴连接,所述主动斜齿轮装设于所述主动轴,若干所述从动斜齿轮分别装设于若干所述从动轴,且若干所述从动斜齿轮分别与所述主动斜齿轮啮合,若干所述从动轴分别与若干所述第一连接轴传动连接,所述第一连接杆的两端分别连接于所述第一连接轴和从动轴。
9、进一步地,还包括第三同步带轮、第四同步带轮和第二履带,所述第三同步带轮固定装设于所述从动轴,所述第四同步带轮固定装设于所述第一连接轴,所述第二履带缠绕所述第三同步带轮和第四同步带轮。
10、进一步地,还包括若干辅助支撑装置,每组所述辅助支撑装置包括支撑板和若干夹具,若干所述夹具固定装设于所述支撑架,所述夹具与所述支撑板连接。
11、进一步地,所述挖掘机构包括支撑装置和切削装置,所述支撑装置连接于所述推移机构与所述切削装置之间。
12、进一步地,所述切削装置包括挖掘电机和刀盘,所述刀盘可拆卸连接于所述支撑装置底部,所述挖掘电机安装于所述支撑装置,所述挖掘电机的输出轴与所述刀盘连接,所述刀盘呈内凹的锥形,且刀盘的尺寸从靠近所述支撑装置的一端向远离所述支撑装置的一端逐渐减小,所述刀盘至少设有两个刀片,每个所述刀片的刀锋呈锯齿状,且相邻刀片的刀锋沿径向交错设置。
13、进一步地,所述挖掘机构还包括除屑装置,所述除屑装置包括空气压缩机、气管、喷头、吸尘器和排屑管,所述气管和排屑管装设于所述支撑装置内,所述喷头安装于所述气管前端,所述空气压缩机与所述气管连通,所述吸尘器与所述排屑管连通,所述刀盘开设有分别与所述气管、排屑管位置对应的缺口。
14、本发明的潜入式星壤掘进机器人与背景技术相比,产生的有益效果为:
15、通过履带传动装置增大推移机构与井壁的接触面积,有效保持工作的稳定性,同时提高了利用井壁对推移机构的摩擦力所能提供给挖掘机构钻进的动力,提高了机器人深入钻进的钻压能力;
16、通过自适应结构可自动调节履带传动装置于支撑架的距离,保持履带传动装置与井壁压紧,使推移机构达到自适应的功能;
17、通过辅助支撑装置进一步增大井壁对推移机构的摩擦力所提供给挖掘机构钻进的动力;
18、驱动装置采用斜齿轮直接传动的方式,减少了齿轮的设计与安装。
技术特征:
1.一种潜入式星壤掘进机器人,包括挖掘机构(7)和可根据井壁进行尺寸调整的推移机构(1),所述推移机构(1)的包络半径大于所述挖掘机构(7)的包络半径,所述挖掘机构(7)位于所述推移机构(1)的底部;其特征在于,所述推移机构(1)包括支撑架(2)、驱动装置(4)、若干履带传动装置(5)和若干自适应结构(6),所述支撑架(2)的底部与所述挖掘机构(7)连接,所述驱动装置(4)装设于所述支撑架(2),所述驱动装置(4)的输出端与所述履带传动装置(5)传动连接,若干所述自适应结构(6)沿着所述支撑架(2)的圆周布置,所述履带传动装置(5)装设于所述自适应结构(6),所述自适应结构(6)用于调整所述履带传动装置(5)与所述支撑架(2)之间的距离。
2.根据权利要求1所述的潜入式星壤掘进机器人,其特征在于,每个所述自适应结构(6)包括第一连接杆(601)、第二连接杆(603)和若干固定连杆(602),所述固定连杆(602)的两端分别与所述第一连接杆(601)的一端、第二连接杆(603)的一端铰接,所述第一连接杆(601)的另一端、第二连接杆(603)的另一端分别铰接于所述支撑架(2),所述第一连接杆(601)、固定连杆(602)、第二连接杆(603)与所述支撑架(2)构成平行四边形机构,所述履带传动装置(5)装设于所述固定连杆(602)。
3.根据权利要求2所述的潜入式星壤掘进机器人,其特征在于,所述自适应结构(6)还包括第三连接杆(604)、挡板(605)、弹簧(606),第一平台(607)和第二平台(608),所述第一平台(607)和第二平台(608)沿着所述支撑架(2)的长度方向间隔设置,所述挡板(605)套设于所述第一平台(607)与所述第二平台(608)之间的支撑架(2),所述第一平台(607)、挡板(605)与所述第二平台(608)通过第一连接件顺次连接,所述弹簧(606)缠绕所述第一连接件,且所述弹簧(606)的两端分别连接于所述第一平台(607)和所述挡板(605),所述第三连接杆(604)的一端与所述第二连接杆(603)的一端铰接,所述第三连接杆(604)的另一端与所述挡板(605)铰接。
4.根据权利要求2所述的潜入式星壤掘进机器人,其特征在于,每个所述履带传动装置(5)包括第一同步带轮(501)、第二同步带轮(502)、第一履带(503)、第一连接轴(504)和第二连接轴(505),所述驱动装置(4)的输出端与所述第一连接轴(504)连接,所述第一同步带轮(501)、第一连接杆(601)的一端、固定连杆(602)的一端装设于所述第一连接轴(504),所述第二同步带轮(502)、第二连接杆(603)的一端、固定连杆(602)的另一端装设于所述第二连接轴(505),所述第一履带(503)缠绕所述第一同步带轮(501)和第二同步带轮(502)。
5.根据权利要求4所述的潜入式星壤掘进机器人,其特征在于,所述驱动装置(4)包括齿轮架(401)、推移电机(402)、主动轴(403)、主动斜齿轮(404)、若干从动轴(405)和若干从动斜齿轮(406),所述齿轮架(401)顶部与所述支撑架(2)连接,所述齿轮架(401)底部与所述挖掘机构(7)连接,若干所述从动轴(405)转动设置于所述齿轮架(401)的圆周,所述推移电机(402)装设于所述支撑架(2),所述推移电机(402)的输出轴与所述主动轴(403)连接,所述主动斜齿轮(404)装设于所述主动轴(403),若干所述从动斜齿轮(406)分别装设于若干所述从动轴(405),且若干所述从动斜齿轮(406)分别与所述主动斜齿轮(404)啮合,若干所述从动轴(405)分别与若干所述第一连接轴(504)传动连接,所述第一连接杆(601)的两端分别连接于所述第一连接轴(504)和从动轴(405)。
6.根据权利要求5所述的潜入式星壤掘进机器人,其特征在于,还包括第三同步带轮(4011)、第四同步带轮(4012)和第二履带(4013),所述第三同步带轮(4011)固定装设于所述从动轴(405),所述第四同步带轮(4012)固定装设于所述第一连接轴(504),所述第二履带(4013)缠绕所述第三同步带轮(4011)和第四同步带轮(4012)。
7.根据权利要求1所述的潜入式星壤掘进机器人,其特征在于,还包括若干辅助支撑装置(3),每组所述辅助支撑装置(3)包括支撑板(302)和若干夹具(301),若干所述夹具(301)固定装设于所述支撑架(2),所述夹具(301)与所述支撑板(302)连接。
8.根据权利要求1至7任一项所述的潜入式星壤掘进机器人,其特征在于,所述挖掘机构(7)包括支撑装置(8)和切削装置(9),所述支撑装置(8)连接于所述推移机构(1)与所述切削装置(9)之间。
9.根据权利要求8所述的潜入式星壤掘进机器人,其特征在于,所述切削装置(9)包括挖掘电机(901)和刀盘(902),所述刀盘(902)可拆卸连接于所述支撑装置(8)底部,所述挖掘电机(901)安装于所述支撑装置(8),所述挖掘电机(901)的输出轴与所述刀盘(902)连接,所述刀盘(902)呈内凹的锥形,且刀盘(902)的尺寸从靠近所述支撑装置(8)的一端向远离所述支撑装置(8)的一端逐渐减小,所述刀盘(902)至少设有两个刀片(903),每个所述刀片(903)的刀锋呈锯齿状,且相邻刀片(903)的刀锋沿径向交错设置。
10.根据权利要求9所述的潜入式星壤掘进机器人,其特征在于,所述挖掘机构(7)还包括除屑装置(10),所述除屑装置(10)包括空气压缩机、气管(1001)、喷头(1002)、吸尘器和排屑管(1003),所述气管(1001)和排屑管(1003)装设于所述支撑装置(8)内,所述喷头(1002)安装于所述气管(1001)前端,所述空气压缩机与所述气管(1001)连通,所述吸尘器与所述排屑管(1003)连通,所述刀盘(902)开设有分别与所述气管(1001)、排屑管(1003)位置对应的缺口(904)。
技术总结
本发明涉及星壤掘进机器人技术领域,更具体地,涉及一种潜入式星壤掘进机器人,利用挖掘机构挖掘星壤,推移机构用于驱动挖掘机构前移,使用时,通过支撑架对推移机构进行支撑,通过驱动装置驱动履带传动装置,履带传动装置作用于井壁实现推移作用,进而向挖掘机构提供钻压力,其中,履带传动装置增大推移机构与井壁的接触面积,有效保持工作的稳定性,同时提高了利用井壁对推移机构的摩擦力所能提供给挖掘机构钻进的动力,提高了机器人深入钻进的钻压能力;同时,通过自适应结构可自动调节履带传动装置于支撑架的距离,保持履带传动装置与井壁压紧,使推移机构达到自适应的功能。
技术研发人员:张涛,武日月,陈颖强,黄玉智,张银梁,龙志炜
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!