基于三维地震勘探点位修正的自走式施工装置及使用方法与流程
本发明涉及三维勘探,具体是基于三维地震勘探点位修正的自走式施工装置及使用方法。
背景技术:
1、三维地震勘探实施时,需要多个炮点和检波点,而炮点和检波点主要通过软件计算处理后,获得准确的分布方式、分布间距等分布参数。在得到分布参数后,需要将分布信息准确的实施在检测面,但是在实际操作时,炮点需要开井。请参阅图5,该图为沁水盆地南部长平井田的炮点变观施工示意图,在炮点的点位图在实际应用时,还会受到一定的影响。该图中x形标号为无法施工点位,*形标号为施工的炮点,通过图可以看出,炮点实际施工点位存在变化。而实地标记位置会与炮点的点位图位置产生偏差,钻井机与炮点对位时也会产生偏差,同时受到无法施工影响的二次运动再次出现偏差。由于炮点点位过多,人工标记形式劳动强度过大,为了提高钻孔位置的准确性和便利性,首先考虑采用自走式的钻孔机构,依据自走机构的运动行程和方向确定实际坐标。但是该方式又出现了问题,由于标记点位间距主要为水平间距,而地面实际会凹凸不平,导致自走轮的运动距离和实际距离并不相同,并且凹凸不平的地面也会导致移动轮运动时方向被干扰。
技术实现思路
1、本发明的目的在于提供基于三维地震勘探点位修正的自走式施工装置及使用方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
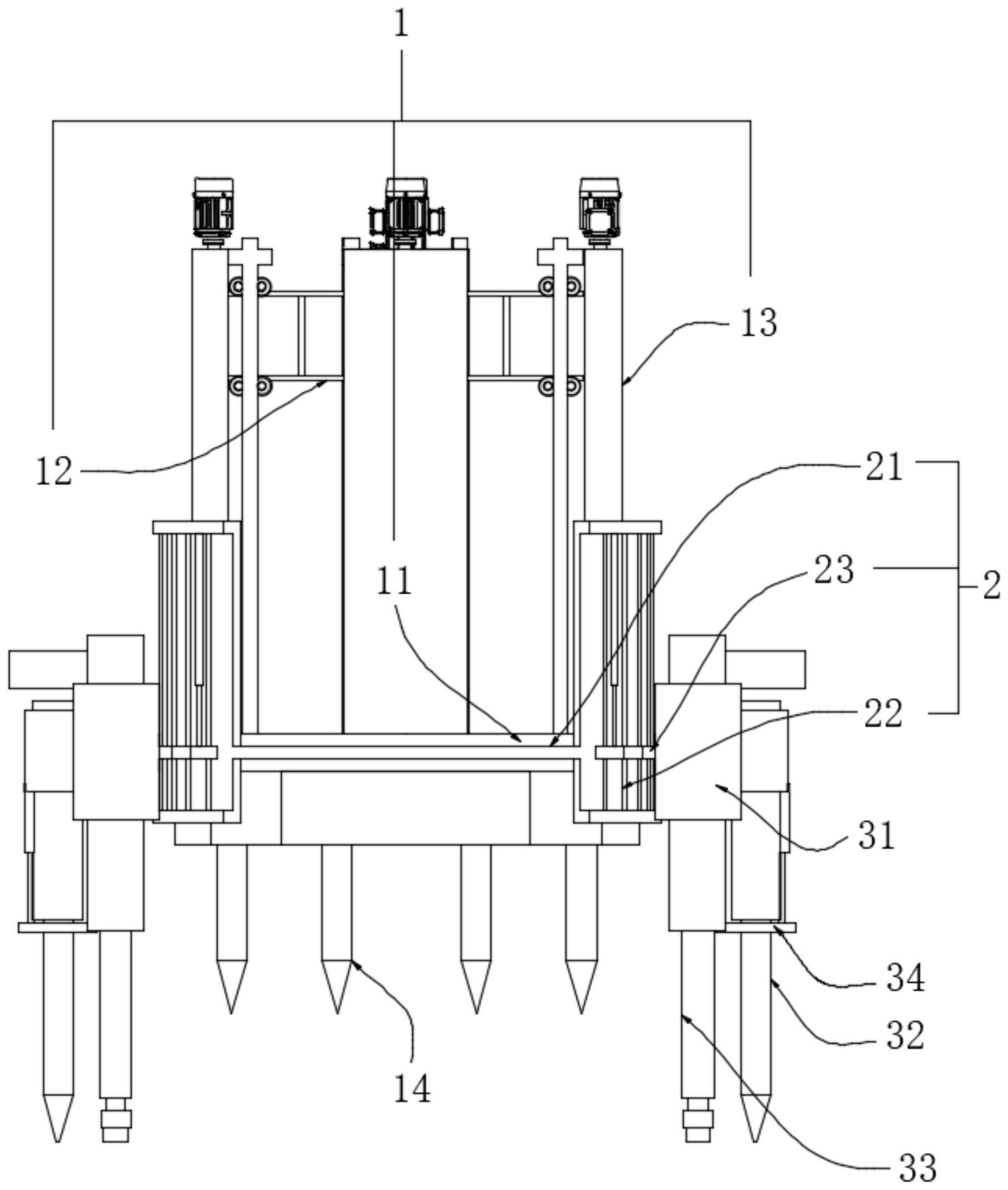
3、基于三维地震勘探点位修正的自走式施工装置,包括钻孔机构,所述钻孔机构包括钻孔平台、升降器、钻孔器,还包括环形自走平台,所述钻孔平台、所述升降器、所述钻孔器安装在所述环形自走平台的顶部用于打孔作业,所述环形自走平台的底部固定连接有若干个环形分布的固定底锥;
4、所述环形自走平台的外部安装有方位调控机构,所述方位调控机构包括旋转在所述环形自走平台外周的监控式旋转环体和两个升降弧形延伸连接板,所述升降弧形延伸连接板对称固定连接在所述监控式旋转环体的两侧,所述升降弧形延伸连接板上垂直滑动连接有监控式滑动连接器;
5、所述方位调控机构的周侧对称设置有两个引导式运动导轨,所述引导式运动导轨包括导轨本体、伸缩式导轨固定插入器、导轨伸缩支撑式移动轮组件、防深陷限位器,所述监控式滑动连接器滑动连接在所述导轨本体的侧面,所述伸缩式导轨固定插入器通过旋转驱动器安装在所述导轨本体远离所述钻孔机构的一侧,所述导轨伸缩支撑式移动轮组件安装在所述导轨本体的两端,所述防深陷限位器安装在所述伸缩式导轨固定插入器的周侧。
6、作为本发明再进一步的方案:所述升降弧形延伸连接板的上下端固定连接有若干个环形等距分布的引导杆,所述监控式滑动连接器上开设有若干个与所述引导杆配合的孔体,所述升降弧形延伸连接板上还安装有控制所述监控式滑动连接器与所述升降弧形延伸连接板相对滑动的升降驱动器。
7、作为本发明再进一步的方案:所述防深陷限位器由伸缩器、接触环、触发传感器组成,所述伸缩器配备有自锁机构,所述触发传感器设置在接触环的底面,所述伸缩式导轨固定插入器的外壁与所述接触环的内孔滑动接触。
8、作为本发明再进一步的方案:所述导轨本体的内部安装有水平仪,且所述水平仪通过无线数据传输模块传输至总控端。
9、作为本发明再进一步的方案,基于三维地震勘探点位修正的自走式施工装置的使用方法,包括:
10、s1:依据炮点分布图,将钻孔机构运动至任一炮点点位,通过钻孔机构与点位对齐后,以该点位为起始原点,以起始原点为基础,获取其他炮点点位坐标,并且设定运动轨迹;
11、s2:起始炮点开孔完毕后,钻孔机构通过固定底锥与地面处于固定阶段,伸缩式导轨固定插入器收缩并且旋转,导轨伸缩支撑式移动轮组件带动导轨本体向上顶升,导轨本体与升降弧形延伸连接板发生相对滑动,导轨本体与地面分离,监控式旋转环体将两个引导式运动导轨以环形自走平台为中心转动调整方向,并且记录转动角度值,通过监控式滑动连接器与导轨本体配合,使导轨本体运动延伸至超过下一运动点位处;
12、s3:升降弧形延伸连接板控制监控式滑动连接器垂直运动,将钻孔机构反顶向上运动,使固定底锥与地面初步分离,通过导轨伸缩支撑式移动轮组件带动导轨本体进一步顶升,此时伸缩式导轨固定插入器受到导轨本体影响向上滑动且位于地孔分离,固定底锥与地面完全分离且具有间距,此时通过防深陷限位器与地面接触,防深陷限位器位于地孔外围支撑,监控式滑动连接器在导轨伸缩支撑式移动轮组件上运动,并且记录运动距离,直至运动至下一点位,并且依据转动角度与运动长度获取下一点位的实际坐标,依据实际坐标值与点位坐标对比判断位置误差。
13、与现有技术相比,本发明的有益效果是:
14、结合三维地震勘探炮点点位实际施工时,采用的自走式钻孔装置以初始炮点为原始起点,根据运动轨迹通过方位调控机构调整引导式运动导轨的方向,通过引导式运动导轨作为位移引导进行位移,依据转动角度方位和位移长度,即可获取钻孔机构运动的准确的坐标,依据钻孔机构与点位坐标对比作为判断钻孔机构的运动准确性的判断基础,该装置可以在炮点点位生成后,无需人工标记,即可进行自主式非人工炮点开孔,并且使开设点位的位置准确度高,针对于偏移点位,依然能够获取准确的点位位置,使勘测施工点位准确,同时结构简单稳定。
技术特征:
1.基于三维地震勘探点位修正的自走式施工装置,包括钻孔机构(1),所述钻孔机构(1)包括钻孔平台(12)、升降器(13)、钻孔器(15),其特征在于:还包括环形自走平台(11),所述钻孔平台(12)、所述升降器(13)、所述钻孔器(15)安装在所述环形自走平台(11)的顶部用于打孔作业,所述环形自走平台(11)的底部固定连接有若干个环形分布的固定底锥(14);
2.根据权利要求1所述的基于三维地震勘探点位修正的自走式施工装置,其特征在于:所述升降弧形延伸连接板(22)的上下端固定连接有若干个环形等距分布的引导杆,所述监控式滑动连接器(23)上开设有若干个与所述引导杆配合的孔体,所述升降弧形延伸连接板(22)上还安装有控制所述监控式滑动连接器(23)与所述升降弧形延伸连接板(22)相对滑动的升降驱动器。
3.根据权利要求1所述的基于三维地震勘探点位修正的自走式施工装置,其特征在于:所述防深陷限位器(34)由伸缩器、接触环、触发传感器组成,所述伸缩器配备有自锁机构,所述触发传感器设置在接触环的底面,所述伸缩式导轨固定插入器(32)的外壁与所述接触环的内孔滑动接触。
4.根据权利要求1所述的基于三维地震勘探点位修正的自走式施工装置,其特征在于:所述导轨本体(31)的内部安装有水平仪,且所述水平仪通过无线数据传输模块传输至总控端。
5.根据权利要求1-4任一所述的基于三维地震勘探点位修正的自走式施工装置的使用方法,其特征在于:包括:
技术总结
本发明涉及三维勘探技术领域,具体公开了基于三维地震勘探点位修正的自走式施工装置及使用方法,包括钻孔机构,所述钻孔机构包括钻孔平台、升降器、钻孔器,所述环形自走平台的外部安装有方位调控机构,所述方位调控机构的周侧对称设置有两个引导式运动导轨,所述引导式运动导轨包括导轨本体、伸缩式导轨固定插入器、导轨伸缩支撑式移动轮组件、防深陷限位器;通过引导式运动导轨作为位移引导进行位移,依据转动角度方位和位移长度,即可获取钻孔机构运动的准确的坐标,该装置可以在炮点点位生成后,无需人工标记,并且使开设点位的位置准确度高,使勘测施工点位准确,同时结构简单稳定。
技术研发人员:王晶,李京涛,王书伦
受保护的技术使用者:山东省煤田地质局物探测量队
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!