一种钻注一体机器人的制作方法
本发明涉及钻注设备,尤其是涉及一种钻注一体机器人。
背景技术:
1、复杂生产地质条件巷道,矿压显现剧烈,变形、破坏程度加剧,维护修复困难。所以,对于自身胶结程度差、内部存在大量节理裂隙的破碎围岩体,常采用注浆的方式加固,增强围岩自承力,提高巷道围岩整体稳定性。
2、现有的煤矿巷道钻孔灌浆主要依靠人工完成,工人的工作强度大,施工时间长,部分利用钻注设备完成的施工段内,钻注设备不易调节,无法有效的对巷道内全部断面进行覆盖,施工不方便,且钻孔和注浆的施工不能匹配,影响施工效率。
技术实现思路
1、本发明的目的是提供一种钻注一体机器人能实现自动化钻注一体操作,降低工人劳动强度,提高施工效率,能满足煤矿巷道内特殊施工场地的施工操作。
2、为实现上述目的,本发明提供了如下技术方案:
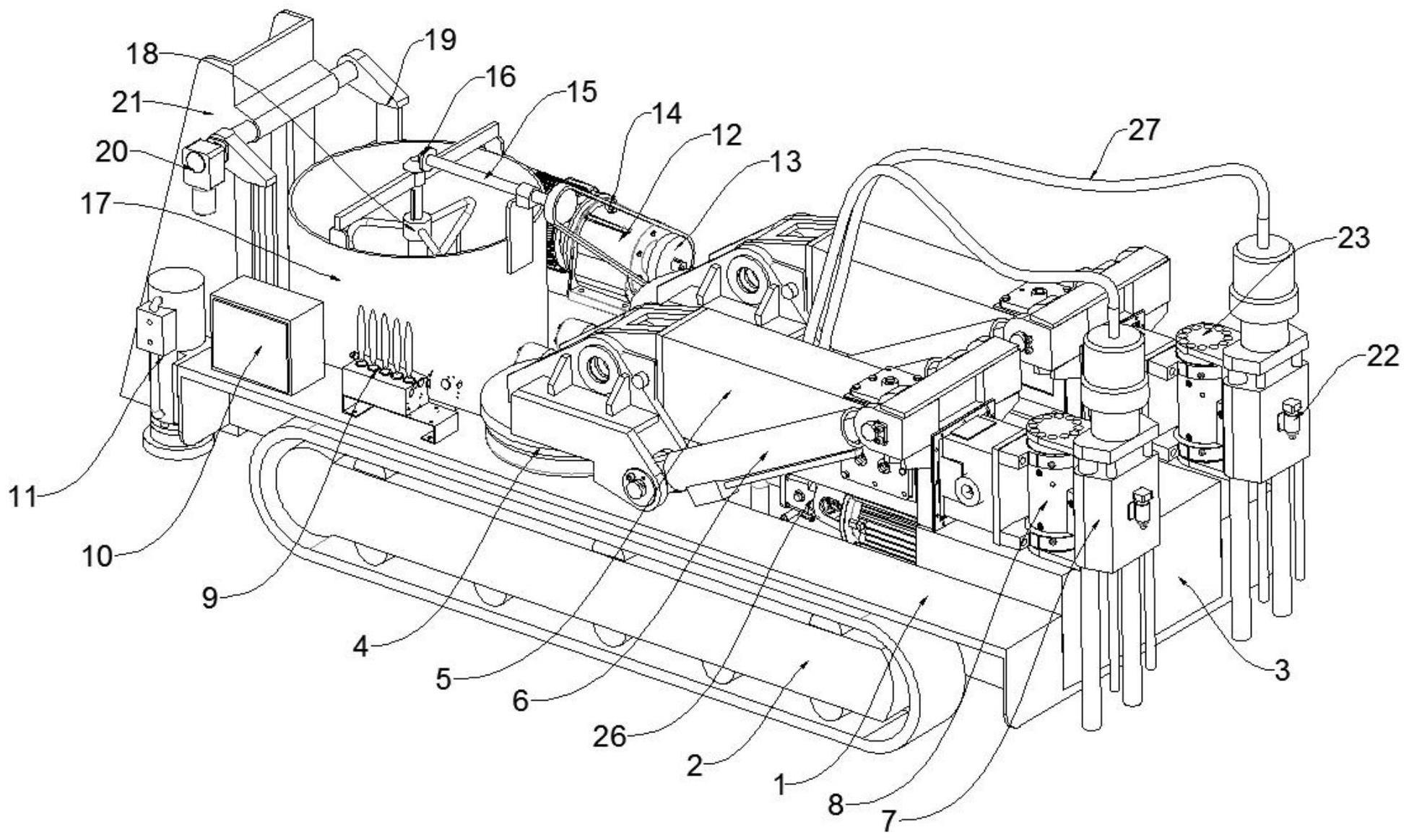
3、一种钻注一体机器人,包括车体平台,所述车体平台的上表面上固定安装有两个电动旋转座,所述电动旋转座的端部旋转安装有液压伸缩钻臂和两根角度调节油缸,两根所述角度调节油缸对称分布在液压伸缩钻臂的两侧,且角度调节油缸的伸缩端与液压伸缩钻臂的侧表面之间通过连接架旋转连接,所述液压伸缩钻臂的伸缩端旋转连接有活动支架,所述活动支架的安装面上固定安装有钻注一体机,所述液压伸缩钻臂伸缩端内侧固定安装有调节电机,所述调节电机的输出轴一端与活动支架的转轴一端固定连接。
4、通过采用上述技术方案,可灵活多向的调节钻注一体机的钻注角度,同时能在钻注的过程中灵活便捷的纠正钻注姿态,以及钻注一体机的设置,可以实现快速高效的钻孔注浆操作,提高了工作效率。
5、进一步地,所述车体平台的上表面上固定安装有搅拌筒,所述车体平台的内侧固定安装有注浆泵,所述注浆泵的进料口固定安装有浆料输送管,所述浆料输送管的另一端与搅拌筒内部底端连通,所述注浆泵的出料口固定安装有导料软管,所述导料软管的出料口与钻注一体机的进料口连通。
6、通过采用上述技术方案,注浆泵的转动,能有效的抽取搅拌筒内部的浆料,并将浆料输送至钻注一体机内,实现稳定的注浆操作。
7、进一步地,所述车体平台的上表面上固定安装有搅拌电机,所述搅拌筒的侧壁上固定连接有固定支架,且固定支架的旋转孔内旋转安装有联动轴,所述联动轴的一端和搅拌电机的输出端均安装有一个同步带轮,两个所述同步带轮之间通过同步带联动。
8、通过采用上述技术方案,在同步带轮和同步带的传动下,搅拌电机的转动能有效的带动联动轴旋转。
9、进一步地,所述搅拌筒的上端口处固定连接有支架,且支架的中间位置处旋转安装有搅拌杆,所述搅拌杆与联动轴相邻的一端均固定连接有一个斜齿轮,两个所述斜齿轮啮合连接。
10、通过采用上述技术方案,在两个斜齿轮的传动下,联动轴的旋转可以稳定有效的带动搅拌杆在搅拌筒的内部旋转,确保浆料能在搅拌筒的内部被有效的搅拌。
11、进一步地,所述车体平台的上表面上固定连接有两根翻斗支撑架,两根所述翻斗支撑架之间旋转安装有翻斗,其中一个所述翻斗支撑架的侧表面上固定安装有翻转电机,所述翻转电机的输出轴与翻斗的转轴一端固定连接,所述翻斗位于搅拌筒的一侧。
12、通过采用上述技术方案,翻转电机可以有效的带动翻斗在翻斗支撑架的顶端翻转,进而能使得翻斗内部盛装的原材料从翻斗的开口端滑落,滑落的原材料落入搅拌筒的内部,确保了该机器人能进行自动上料操作。
13、进一步地,所述钻注一体机的一侧外表面上固定安装有激光定位器。
14、通过采用上述技术方案,激光定位器可以在钻孔时进行辅助定位操作,提高钻孔位置的精确度。
15、进一步地,所述车体平台的对称侧表面上均设置有履带机构,所述车体平台的内侧端面上固定安装有油箱和柴油动力总成,所述油箱通过供油管向柴油动力总成供油,所述柴油动力总成的内部包含有移动机构和发电系统,所述移动机构的输出端与履带机构的输入端连接。
16、通过采用上述技术方案,可以利用柴油动力总成为来驱动履带机构转动,确保了该机器人能进行位置移动,同时利用柴油动力总成内部的发电系统为整个机器人的工作提供电能。
17、进一步地,所述车体平台的上表面上固定安装有手动控制开关、控制中心,所述手动控制开关与控制中心电性连接,所述车体平台尾部对称两端分别固定安装有一个支腿油缸。
18、通过采用上述技术方案,可以利用手动控制开关箱控制中心下达指令,进而向机器人下达工作指令,而车体平台尾部的支腿油缸可以在该机器人钻注时提高整个机器人的稳定性。
19、综上所述,本发明的有益技术效果为:
20、1、通过钻注一体机的设置,可以使得钻孔、注浆快速高效的进行,同时在钻注时,可以调节角度调节油缸的伸缩量来调节液压伸缩钻臂的倾斜角度,进而能有效的改变钻注一体机的钻注角度,接着能通过调节液压伸缩钻臂的长度来调节钻注一体机的位置,然后再利用调节电机来带动活动支架偏转,进一步调节钻注一体机的钻注位置,使得该机器人能有效的适应井工煤矿的巷道作业,能有效的面对巷道内不同的断面,工作性能更强,由于设置有两个钻注一体机,因此可以同时对巷道的两侧进行钻注作业,工作效率得到了有效提高,且整个机器人能便捷的拆卸各个组成模块,便于巷道内安装作业,适应环境的能力得到了有效提高,以及在钻注的过程中,能灵活的纠正钻注姿态;
21、2、通过在车体平台上设置搅拌筒,可以在机器人移动的过程中,携带搅拌筒一道移动,以及能携带浆料原材料一道移动,需要注浆时,可以利用斜齿轮、联动轴、同步带轮、同步带将搅拌电机的动能传递至搅拌杆上,使得搅拌杆在搅拌筒的内部旋转,进而对浆料原材料进行搅拌,不在受风、电、管路距离等限制,钻注效率得到了进一步提高;
22、3、通过翻斗的设置,可以在盛装原材料时,控制机器人移动,使得竖直状态下的翻斗能插入原料堆中,接着启动翻转电机,利用翻转电机带动翻斗在翻斗支撑架的上端翻转,使得位于翻斗内部的原材料能从翻斗的一端开口处排出,并落入搅拌筒的内部,实现自动上料操作,降低了工作人员的劳动强度,进一步提高了该机器人的自动化程度。
技术特征:
1.一种钻注一体机器人,包括车体平台(1),其特征在于:所述车体平台(1)的上表面上固定安装有两个电动旋转座(4),所述电动旋转座(4)的端部旋转安装有液压伸缩钻臂(5)和两根角度调节油缸(6),两根所述角度调节油缸(6)对称分布在液压伸缩钻臂(5)的两侧,且角度调节油缸(6)的伸缩端与液压伸缩钻臂(5)的侧表面之间通过连接架旋转连接,所述液压伸缩钻臂(5)的伸缩端旋转连接有活动支架(23),所述活动支架(23)的安装面上固定安装有钻注一体机(7),所述液压伸缩钻臂(5)伸缩端内侧固定安装有调节电机(8),所述调节电机(8)的输出轴一端与活动支架(23)的转轴一端固定连接。
2.根据权利要求1所述的一种钻注一体机器人,其特征在于:所述车体平台(1)的上表面上固定安装有搅拌筒(17),所述车体平台(1)的内侧固定安装有注浆泵(26),所述注浆泵(26)的进料口固定安装有浆料输送管(25),所述浆料输送管(25)的另一端与搅拌筒(17)内部底端连通,所述注浆泵(26)的出料口固定安装有导料软管(27),所述导料软管(27)的出料口与钻注一体机(7)的进料口连通。
3.根据权利要求2所述的一种钻注一体机器人,其特征在于:所述车体平台(1)的上表面上固定安装有搅拌电机(12),所述搅拌筒(17)的侧壁上固定连接有固定支架,且固定支架的旋转孔内旋转安装有联动轴(15),所述联动轴(15)的一端和搅拌电机(12)的输出端均安装有一个同步带轮(13),两个所述同步带轮(13)之间通过同步带(14)联动。
4.根据权利要求3所述的一种钻注一体机器人,其特征在于:所述搅拌筒(17)的上端口处固定连接有支架,且支架的中间位置处旋转安装有搅拌杆(18),所述搅拌杆(18)与联动轴(15)相邻的一端均固定连接有一个斜齿轮(16),两个所述斜齿轮(16)啮合连接。
5.根据权利要求2所述的一种钻注一体机器人,其特征在于:所述车体平台(1)的上表面上固定连接有两根翻斗支撑架(19),两根所述翻斗支撑架(19)之间旋转安装有翻斗(21),其中一个所述翻斗支撑架(19)的侧表面上固定安装有翻转电机(20),所述翻转电机(20)的输出轴与翻斗(21)的转轴一端固定连接,所述翻斗(21)位于搅拌筒(17)的一侧。
6.根据权利要求1所述的一种钻注一体机器人,其特征在于:所述钻注一体机(7)的一侧外表面上固定安装有激光定位器(22)。
7.根据权利要求1所述的一种钻注一体机器人,其特征在于:所述车体平台(1)的对称侧表面上均设置有履带机构(2),所述车体平台(1)的内侧端面上固定安装有油箱(3)和柴油动力总成(24),所述油箱(3)通过供油管向柴油动力总成(24)供油,所述柴油动力总成(24)的内部包含有移动机构和发电系统,所述移动机构的输出端与履带机构(2)的输入端连接。
8.根据权利要求1所述的一种钻注一体机器人,其特征在于:所述车体平台(1)的上表面上固定安装有手动控制开关(9)、控制中心(10),所述手动控制开关(9)与控制中心(10)电性连接,所述车体平台(1)尾部对称两端分别固定安装有一个支腿油缸(11)。
技术总结
本发明公开了一种钻注一体机器人,其涉及钻注设备技术领域,旨在解决现有的煤矿巷道钻孔灌浆主要依靠人工完成,工人的工作强度大,施工时间长,部分利用钻注设备完成的施工段内,钻注设备不易调节,无法有效的对巷道内全部断面进行覆盖,施工不方便,且钻孔和注浆的施工不能匹配,影响施工效率的问题,其技术方案要点是包括车体平台,所述车体平台的上表面上固定安装有两个电动旋转座,所述电动旋转座的端部旋转安装有液压伸缩钻臂和两根角度调节油缸,两根所述角度调节油缸对称分布在液压伸缩钻臂的两侧。达到了能实现自动化钻注一体操作,降低工人劳动强度,提高施工效率,能满足煤矿巷道内特殊施工场地的施工操作的效果。
技术研发人员:成云海
受保护的技术使用者:成云海
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!