一种掘、锚、运一体化掘进机及掘进机作业方法
本发明涉及巷道掘进支护领域,具体涉及一种掘、锚、运一体化掘进机及掘进机作业方法。
背景技术:
1、井下掘进和支护是井下巷道开拓时的必须工艺,井下开拓主要存在两种手段即打眼放炮和掘进机开拓,支护多为人工支护,目前市场上已出现掘进机机载锚杆钻机设备,如中国实用新型专利,发明名称:掘探一体机、申请号:cn201420786049.x,该设备在掘进机机身两侧集成两个锚杆钻机,掘进机掘进工作完毕后,人工操作机载锚杆钻机进行支护作业,该设备虽能减少人工劳动强度,但是不能从根本上实现掘进、锚网输送和支护的全机械化,只是部分机械化。另外滚筒式的掘锚一体机,如中国发明专利,发明名称:掘锚机及掘进系统、申请号:cn202111315963.7,主要定位为软岩截割即岩石硬度f≤6,且其具有一定的空顶距,无法实现迎头全支护,再者其锚杆钻机形式布置制约了锚杆支护的范围,且无法布置锚网输送装置。
技术实现思路
1、本发明的目的在于:针对上述存在的问题,本发明提供一种掘、锚、运一体化掘进机及掘进机作业方法,可实现煤岩/岩石掘进、铺网输送、支护三者的全机械化;通过搭载装置、锚网输送装置和输送机构的三级移动增加了支护行程,在不用反复调整掘进机本体位置的情况下,即可将锚网移动至巷道迎头最前端,实现了随掘随支;通过二段升举确保了锚网长距离运输过程中的稳定性,同时二段升举的移动方式也可以充分利用巷道上部空间,避免锚网输送装置与其他巷道内设备触碰,可在小空顶间距的工况下进行铺网。
2、本发明采用的技术方案如下:
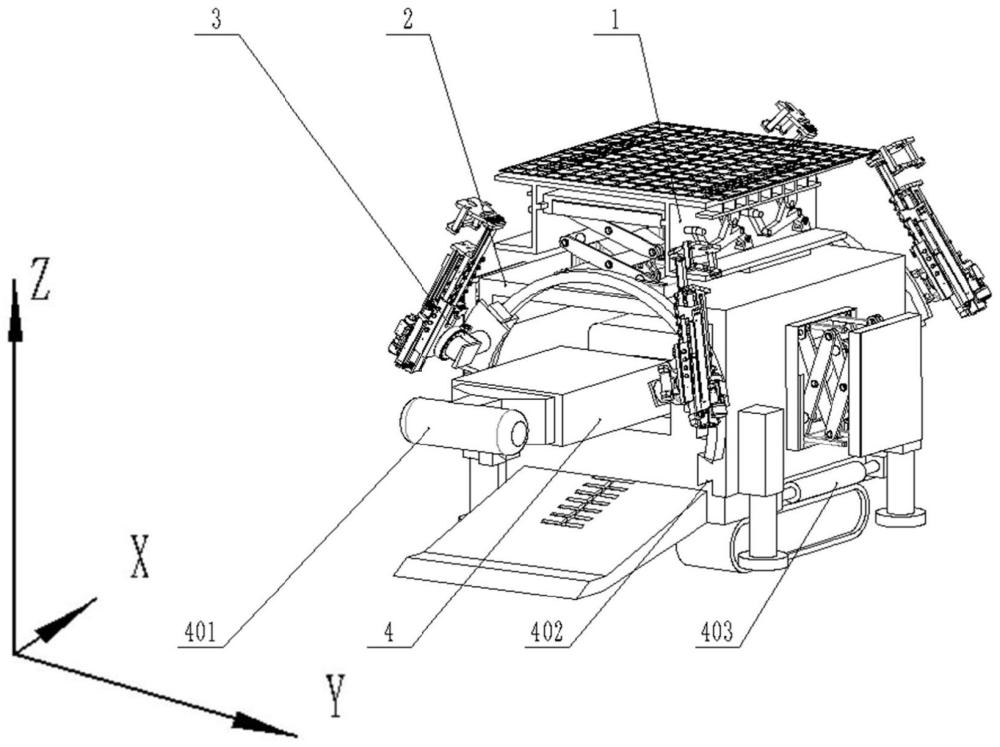
3、一种掘、锚、运一体化掘进机,包括掘进机本体,所述掘进机本体上设有用于工作面迎头的截割机构,还包括锚网输送装置、搭载装置和钻机系统;所述搭载装置为门式结构,所述搭载装置的顶部设有用于承载锚网输送装置的承载平台,所述搭载装置上搭载有可作用于目标区域的形成支撑的支撑机构,所述搭载装置跨设于掘进机本体上,并通过第一水平驱动装置与掘进机本体可移动连接,所述第一水平驱动装置可带动搭载装置相对掘进机本体沿水平方向移动;所述锚网输送装置通过锚网升降装置可升降连接于搭载装置的承载平台,所述锚网输送装置通过第二水平驱动装置与锚网升降装置可移动连接,所述第二水平驱动装置可带动锚网输送装置相对搭载装置沿水平方向移动;所述锚网输送装置包括用于搭载锚网的输送平台、以及可沿水平方向移动输送平台上锚网的输送机构;所述搭载装置上还搭载有钻机系统,所述钻机系统包括钻机和位姿调控机构,所述位姿调控机构安装于搭载装置,所述钻机装配于位姿调控机构,并能在位姿调控机构的驱动下改变与搭载装置的相对位姿;所述钻机处装配有锚杆,所述钻机可驱动锚杆在目标面上钻洞,并限制锚杆于钻洞内,所述锚杆上设有可限制锚网的托盘。
4、进一步地,所述支撑机构包括升降支撑部和侧帮支护部;所述升降支撑部可相对搭载装置沿z轴方向移动,所述升降支撑部可相对搭载装置伸出并抵接于目标区域的底面形成支撑,所述侧帮支护部可相对搭载装置沿y轴方向位移,所述侧帮支护部可相对搭载装置伸出并抵接于目标区域的侧壁形成侧帮支护。所述升降支撑部包括支腿升降驱动结构和支腿结构,所述支腿升降驱动结构可驱动支腿结构沿z轴方向伸缩,所述支腿结构可在支腿升降驱动结构的作用下相对搭载装置伸出并抵接于巷道底板对搭载装置进行支撑。
5、进一步地,所述锚网输送装置可在锚网升降装置的驱动下沿z轴方向移动,所述可在第二水平驱动装置的驱动下沿x轴方向位移;所述输送平台上设有镂空的输送开口,所述输送机构装配于输送平台的下方,所述输送机构包括输送执行机构和输送驱动机构,所述输送执行机构可在输送驱动机构的驱动下在竖直平面内沿圆周轨迹或类圆周轨迹做循环运动,带动输送执行机构自输送开口伸入锚网空隙并推动锚网沿x轴方向步进。
6、进一步地,所述输送平台下方设有侧板;所述输送驱动机构包括依次铰接的第一连杆、第二连杆、第三连杆和输送驱动装置,所述第一连杆相对于铰接第二连杆的另一端铰接于输送平台的侧板,所述第三连杆相对于铰接第二连杆的另一端铰接于侧板,所述第二连杆的中部向输送执行机构延伸有分支连接部,所述分支连接部的延伸端铰接于输送执行机构,所述输送驱动装置驱动第三连杆铰接于侧板的一端转动。
7、进一步地,所述输送执行机构包括水平元件和若干垂直于水平元件的直立元件,所述水平元件沿x轴方向布置并与输送开口匹配,若干所述直立元件沿水平元件长度方向间隔,所述输送驱动机构连接于水平元件,输送驱动机构通过驱动水平元件使得其上的若干直立元件同步随动,所述直立元件可自输送开口伸入锚网空隙并推动锚网沿x轴方向步进。
8、进一步地,所述位姿调控机构包括拱形钻机轨道、钻机位移装置、第一回转装置、钻机第二回转装置;所述拱形钻机轨道装配于搭载装置,所述钻机位移装置与拱形钻机轨道匹配,并可沿拱形钻机轨道位移;所述第一回转装置装配于钻机位移装置,所述钻机第二回转装置装配于第一回转装置,所述钻机搭载于第二回转装置;所述钻机可通过钻机位移装置沿拱形钻机轨道位移、通过第一回转装置沿以y轴方向为轴线回转,通过第二回转装置以拱形钻机轨道对应钻机位移装置的径向为轴线回转。
9、进一步地,所述钻机包括钻杆旋转驱动机构、钻杆进给驱动机构、钻架、钻机安装机构和钻杆导向支架,所述钻架通过钻机安装机构安装于姿调控机构,钻杆进给驱动机构装配于所述钻架的尾端、钻杆导向支架装配于所述钻架的首端,所述钻杆旋转驱动机构可在钻杆进给驱动机构的带动下沿钻架长度方向移动,所述锚杆的尾端装配于钻杆旋转驱动机构、首端/中部装配于钻杆导向支架,所述锚杆可在钻杆旋转驱动机构的带动下转动、在钻杆进给驱动机构的带动下沿锚杆长度所在的方向向锚杆首端进给。
10、进一步地,所述锚网升降装置包括上平台、交叉连杆、升降驱动装置和下平台,所述下平台装配于搭载装置的承载平台,所述交叉连杆连接上平台和下平台,所述升降驱动装置可驱动交叉连杆展开或折叠,所述上平台搭载有第二水平驱动装置,所述第二水平驱动装置可驱动输送平台沿x轴方向位移。
11、一种掘进机作业方法,应用上述的掘、锚、运一体化掘进机,包括如下步骤:
12、掘进机本体工作:掘进机本体移动至工作区域,启动截割机构进行截割作业,截割巷道成形后,截割机构落于巷道底板,进行支护作业;
13、锚网上料工作:第一水平驱动装置驱动搭载装置向背离迎头方向移动,第二水平驱动装置驱动锚网输送装置的输送平台向背离迎头方向移动,将锚网放置于锚网输送装置;
14、搭载装置支护步骤:第一水平驱动装置驱动搭载装置向迎头方向移动,移动到目标位置后,搭载装置上的支撑机构启动,进行支护作业;
15、锚网输送步骤:第二水平驱动装置驱动锚网输送装置的输送平台向迎头方向移动,锚网升降装置升高到半举升状态,使得输送平台上的锚网与巷道顶板留有间距,输送机构启动,将锚网推送至迎头目标支护区,锚网升降装置升高到全举升状态,使锚网抵接于巷道顶板;
16、锚杆固定步骤:通过位姿调控机构调节钻机的位置,使钻机上搭载的锚杆首端对正巷道顶板,钻机工作,旋转锚杆并进给,在巷道顶板钻洞,驱动锚杆钻过锚网的网眼固定于钻洞,通过锚杆上的托盘承托锚网;循环固定步骤:锚网升降装置恢复至半举升状态,通过第二水平驱动装置驱动输送平台向远离迎头方向移动一个支护间距,和/或收起搭载装置上的支撑机构,通过第一水平驱动装置驱动搭载装置向背离迎头的方向移动,支撑机构重新支撑,钻机系统进行锚杆固定步骤,循环本步骤,直至锚网被全部固定于顶板;
17、复位步骤:钻机、锚网升降装置、锚网输送装置复位,支撑机构收回,搭载装置复位,截割机构抬起。
18、进一步地,在锚网输送步骤中,输送机构驱动第三连杆绕与侧板的铰接点转动,带动输送执行机构沿圆周轨迹或类圆周轨迹做循环运动,使输送执行机构上的直立元件在升起时,自输送开口伸入锚网空隙,在下降时,推动锚网沿x轴方向步进,直至将锚网输送至目标位置,输送执行机构复位,直立元件的顶端不超过输送平台的台面。
19、综上所述,由于采用了上述技术方案,本发明的有益效果是:
20、1、本发明通过搭载装置、锚网输送装置和输送机构的三级移动增加了支护行程,在不用反复调整掘进机本体位置的情况下,即可将锚网移动至巷道迎头最前端,实现了随掘随支。
21、2、本发明通过二段升举确保了锚网长距离运输过程中的稳定性,同时二段升举的移动方式也可以充分利用巷道上部空间,避免锚网输送装置与其他巷道内设备触碰,可在小空顶间距的工况下进行铺网。
22、3、本发明的钻机系统设计实现了钻机系统多自由度,全方位,高效支护,该锚护掘进机真正实现了井下全机械化作业,降低了工人劳动强度。
23、4、本发明的拱形钻机轨道不仅与搭载装置结构相适配,还能获得较大的支护范围,空间利用率高。
24、5、本发明实现了掘进、铺网、锚钻功能的有机结合,可实现井下巷道快速,安全,高效掘进。
25、6、本发明可对侧壁进行支护,极大地保障了井下作业人员的安全。
26、7、本发明的锚网输送装置通过连杆机构充分利用锚网空隙,既能实现锚网输送,又能将锚网输送至迎头后退回到锚网下部,不至于影响钻机作业。
- 还没有人留言评论。精彩留言会获得点赞!