一种具有视觉机械手的煤矿回采巷道临时支护机器人系统的制作方法
本发明涉及煤矿开采的,尤其涉及一种具有视觉机械手的煤矿回采巷道临时支护机器人系统。
背景技术:
1、随着煤矿开采机械化程度的逐步提高和危险场景劳动力的迅速下降,综采和回采巷道支护的快速无人化已经成为中国在2025年之前必须要实现的目标。回采巷道循环支护自动化和智能化目前已经被国内各大煤业集团确定为作业面无人化的主攻方向。
2、公告号为cn105507931b的中国发明专利公开了一种采煤工作面支护机器人,包括支护部件、行走部件、控制器和多种类型的智能传感器;支护部件用来完成支护机器人的升降,对采煤工作面顶板进行有效支撑;行走部件用来完成支护机器人的自由迁移;控制器根据采集的各种智能传感器数据,实现支护机器人的支护控制。该发明为支护机器人自身姿态感知及控制、智能传感器自主控制、各类传感器数据综合应用提供一种新的方法,通过无线方式实现支护机器人控制器和各个智能设备之间的通信和设备互联,减少了控制器与其配接设备的电缆连接器,方便扩展配接设备,简化了系统,降低了成本,提高了系统可靠性。但是该发明是一种自行走独立支护系统,控制更加复杂而且成本更高,尤其是自行走对巷道底板的要求稍高。
技术实现思路
1、本发明旨在解决现有技术的不足,而提供一种具有视觉机械手的煤矿回采巷道临时支护机器人系统。
2、本发明为实现上述目的,采用以下技术方案:
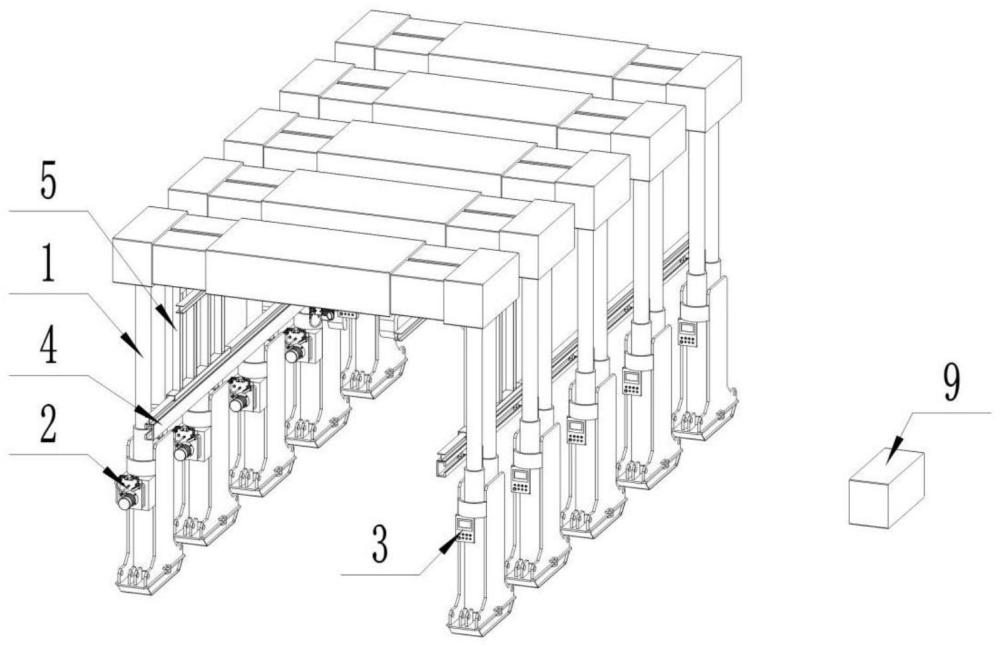
3、一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,包括平行设置的若干伸缩式液压支护门架总成,每个伸缩式液压支护门架总成上均安装有伸缩式液压支护门架液压泵站模块、伸缩式液压支护门架无线控制和智能单元模块,若干伸缩式液压支护门架总成的左右两侧内壁上均安装有燕尾工型轨道和供电通讯电路总成,若干伸缩式液压支护门架总成中间部底部安装有数控移动门架式液压支架平台总成,数控移动门架式液压支架平台总成移动安装在燕尾工型轨道和供电通讯电路总成上,数控移动门架式液压支架平台总成上安装有数控移动液压平台液压泵站阀组模块、数控移动门架式液压支架平台无线控制和智能单元模块和左右两套多自由度视觉机械手;
4、还包括近远程人机协作无线智能可视化控制平台,近远程人机协作无线智能可视化控制平台与伸缩式液压支护门架总成、燕尾工型轨道和供电通讯电路总成、移动数控移动门架式液压支架平台总成、自由度视觉机械手通讯连接。
5、每个伸缩式液压支护门架总成均包括左右对称设置的底座,每个底座上均安装有两个升降油缸,每个升降油缸的升降活塞杆顶部设有侧梁,左右相对的两个侧梁中间设有中间梁,侧梁与中间梁之间安装有伸缩油缸。
6、伸缩式液压支护门架液压泵站模块固定安装在伸缩式液压支护门架总成的底座上,伸缩式液压支护门架液压泵站模块由支持伸缩式液压支护门架总成的液压泵站、液压油箱和电液控制阀组模块组成。
7、伸缩式液压支护门架无线控制和智能单元模块固定安装在伸缩式液压支护门架总成的底座上,伸缩式液压支护门架无线控制和智能单元模块由无线遥控的支护门架智能控制模块和支护门架传感器系统组成,其中支护门架传感器系统包含支护门架液压系统压力传感器、液压油箱的液位传感器、液压油箱的温度传感器、支护门架收缩和打开的行程开关、支护门架位移传感器、支护门架的倾斜传感器、支护门架顶部的重力传感器、瓦斯浓度探测器和含氧浓度探测器。
8、燕尾工型轨道和供电通讯电路总成包括设置在伸缩式液压支护门架总成内侧的滑轨,底座面向滑轨的一侧设有支撑杆,支撑杆伸入滑轨内部的一端设有设有滚子支撑组件,滑轨底部设有滑轨齿条板,底座上对应滑轨齿条板设有滑轨驱动液压马达,滑轨驱动液压马达连有滑轨驱动齿轮,滑轨驱动齿轮、滑轨齿条板啮合安装,底座面向滑轨的一侧设有滑轨锁定油缸,滑轨侧壁上设有与滑轨锁定油缸活塞杆对应的锁定孔,滑轨顶部安装有工字形轨道,滑轨一侧设有通讯支架,通讯支架上安装有滑轨供电通讯缆管。
9、数控移动门架式液压支架平台总成包括移动门架,移动门架的两侧面底部设有n形吊轨,n形吊轨滑动安装在工字形轨道的上翼缘板上,n形吊轨的两侧板之间旋转安装有若干辊轴,辊轴滚动设置在工字形轨道顶部,滑轨一侧设有移动门架齿条板,n形吊轨一侧设有移动门架驱动马达,移动门架驱动马达连有移动门架驱动齿轮,移动门架驱动齿轮、移动门架齿条板啮合安装,底座面向n形吊轨的一侧设有吊轨锁定油缸,n形吊轨侧壁上设有与吊轨锁定油缸活塞杆对应的锁定孔,通讯支架上安装有吊轨供电通讯缆坦克链,移动门架中间架底部左右两侧对称设有工字形回转驱动安装梁。
10、数控移动液压平台液压泵站阀组模块固定在移动门架中间架底部,数控移动液压平台液压泵站阀组模块由数控移动门架式液压支架平台总成的液压泵站、液压油箱和电液控制阀组模块组成。
11、数控移动门架式液压支架平台无线控制和智能单元模块固定在移动门架中间架底部,数控移动门架式液压支架平台无线控制和智能单元模块由无线遥控的移动门架智能控制模块和移动门架传感器系统组成,其中移动门架传感器系统包含移动门架液压系统压力传感器、液压油箱的液位传感器、液压油箱的温度传感器、移动门架位移传感器、瓦斯浓度探测器和含氧浓度探测器。
12、多自由度视觉机械手包括滑动安装在工字形回转驱动安装梁下翼缘板上的u形吊轨,u形吊轨两侧板之间旋转安装有若干转辊,转辊滚动安装在工字形回转驱动安装梁底部,工字形回转驱动安装梁上翼缘板一侧设有u形吊轨齿条板,u形吊轨一侧设有u形吊轨驱动马达,u形吊轨驱动马达连有u形吊轨驱动齿轮,u形吊轨驱动齿轮、u形吊轨齿条板啮合安装,u形吊轨底部安装有回转马达,回转马达的输出轴底部连接有提升油缸,提升油缸的活塞杆底部安装有机械抓手安装盘,机械抓手安装盘顶部两侧铰接有抓手油缸,抓手油缸的另外一端铰接有抓手臂,抓手臂通过销轴铰接在机械抓手安装盘上,抓手臂端部装有云台摄像头、瓦斯浓度探测器和临时供电用防水航空插头。
13、近远程人机协作无线智能可视化控制平台是一个可以近距离也可以远程可视化操控的带视频和现场工作参数显示的遥控平台。
14、本发明的有益效果是:本发明采用多套具有独立液压系统和控制系统的伸缩式液压支护门架和在搭建在液压支护门架支腿上的可移动轨道上移动的两个带有视觉的机械手系统组成可以近远程可视化遥控机械手进行门架收缩、门架转移、门架打开的现场无人化作业完成作业面需要的临时支护,在煤矿最为危险的作业场景实现现场无人或在没有支护保证的现场完全替代人,使得采用临时支护进行煤矿作业时伤亡率显著降低。
技术特征:
1.一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,
2.根据权利要求1所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,每个伸缩式液压支护门架总成(1)均包括左右对称设置的底座(11),每个底座(11)上均安装有两个升降油缸(12),每个升降油缸(12)的升降活塞杆(13)顶部设有侧梁(14),左右相对的两个侧梁(14)中间设有中间梁(15),侧梁(14)与中间梁(15)之间安装有伸缩油缸(16)。
3.根据权利要求2所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,伸缩式液压支护门架液压泵站模块(2)固定安装在伸缩式液压支护门架总成(1)的底座(11)上,伸缩式液压支护门架液压泵站模块(2)由支持伸缩式液压支护门架总成(1)的液压泵站、液压油箱和电液控制阀组模块组成。
4.根据权利要求3所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,伸缩式液压支护门架无线控制和智能单元模块(3)固定安装在伸缩式液压支护门架总成(1)的底座(11)上,伸缩式液压支护门架无线控制和智能单元模块(3)由无线遥控的支护门架智能控制模块和支护门架传感器系统组成,其中支护门架传感器系统包含支护门架液压系统压力传感器、液压油箱的液位传感器、液压油箱的温度传感器、支护门架收缩和打开的行程开关、支护门架位移传感器、支护门架的倾斜传感器、支护门架顶部的重力传感器、瓦斯浓度探测器和含氧浓度探测器。
5.根据权利要求4所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,燕尾工型轨道和供电通讯电路总成(4)包括设置在伸缩式液压支护门架总成(1)内侧的滑轨(41),底座(11)面向滑轨(41)的一侧设有支撑杆(42),支撑杆(42)伸入滑轨(41)内部的一端设有设有滚子支撑组件(43),滑轨(41)底部设有滑轨齿条板(44),底座(11)上对应滑轨齿条板(44)设有滑轨驱动液压马达(45),滑轨驱动液压马达(45)连有滑轨驱动齿轮(46),滑轨驱动齿轮(46)、滑轨齿条板(44)啮合安装,底座(1)面向滑轨(41)的一侧设有滑轨锁定油缸(47),滑轨(41)侧壁上设有与滑轨锁定油缸(47)活塞杆对应的锁定孔,滑轨(41)顶部安装有工字形轨道(48),滑轨(41)一侧设有通讯支架(49),通讯支架(49)上安装有滑轨供电通讯缆管(410)。
6.根据权利要求5所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,数控移动门架式液压支架平台总成(5)包括移动门架(51),移动门架(51)的两侧面底部设有n形吊轨(52),n形吊轨(52)滑动安装在工字形轨道(48)的上翼缘板上,n形吊轨(52)的两侧板之间旋转安装有若干辊轴(53),辊轴(53)滚动设置在工字形轨道(48)顶部,滑轨(41)一侧设有移动门架齿条板(54),n形吊轨(52)一侧设有移动门架驱动马达(55),移动门架驱动马达(55)连有移动门架驱动齿轮(56),移动门架驱动齿轮(56)、移动门架齿条板(54)啮合安装,底座(11)面向n形吊轨(52)的一侧设有吊轨锁定油缸(57),n形吊轨(52)侧壁上设有与吊轨锁定油缸(57)活塞杆对应的锁定孔,通讯支架(49)上安装有吊轨供电通讯缆坦克链(58),移动门架(51)中间架底部左右两侧对称设有工字形回转驱动安装梁(59)。
7.根据权利要求6所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,数控移动液压平台液压泵站阀组模块(6)固定在移动门架(51)中间架底部,数控移动液压平台液压泵站阀组模块(6)由数控移动门架式液压支架平台总成(5)的液压泵站、液压油箱和电液控制阀组模块组成。
8.根据权利要求7所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,数控移动门架式液压支架平台无线控制和智能单元模块(7)固定在移动门架(51)中间架底部,数控移动门架式液压支架平台无线控制和智能单元模块(7)由无线遥控的移动门架智能控制模块和移动门架传感器系统组成,其中移动门架传感器系统包含移动门架液压系统压力传感器、液压油箱的液位传感器、液压油箱的温度传感器、移动门架位移传感器、瓦斯浓度探测器和含氧浓度探测器。
9.根据权利要求8所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,多自由度视觉机械手(8)包括滑动安装在工字形回转驱动安装梁(59)下翼缘板上的u形吊轨(81),u形吊轨(81)两侧板之间旋转安装有若干转辊(82),转辊(82)滚动安装在工字形回转驱动安装梁(59)底部,工字形回转驱动安装梁(59)上翼缘板一侧设有u形吊轨齿条板(83),u形吊轨(81)一侧设有u形吊轨驱动马达(84),u形吊轨驱动马达(84)连有u形吊轨驱动齿轮(85),u形吊轨驱动齿轮(85)、u形吊轨齿条板(83)啮合安装,u形吊轨(81)底部安装有回转马达(86),回转马达(86)的输出轴底部连接有提升油缸(87),提升油缸(87)的活塞杆底部安装有机械抓手安装盘(88),机械抓手安装盘(88)顶部两侧铰接有抓手油缸(89),抓手油缸(89)的另外一端铰接有抓手臂(810),抓手臂(810)通过销轴铰接在机械抓手安装盘(88)上,抓手臂(810)端部装有云台摄像头、瓦斯浓度探测器和临时供电用防水航空插头。
10.根据权利要求9所述的一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其特征在于,近远程人机协作无线智能可视化控制平台(9)是一个可以近距离也可以远程可视化操控的带视频和现场工作参数显示的遥控平台。
技术总结
本发明是一种具有视觉机械手的煤矿回采巷道临时支护机器人系统,其原理是采用多套具有独立液压系统和控制系统的伸缩式液压支护门架总成和在搭建在伸缩式液压支护门架总成上的可移动轨道上移动的两个带有视觉采集功能的多自由度视觉机械手组成,可以通过近远程人机协作无线智能可视化控制平台遥控进行伸缩式液压支护门架总成其中一个目标门架的升降及收缩、转移、打开的现场无人化作业,完成作业面需要的临时支护,在煤矿最为危险的作业场景实现现场无人或在没有支护保证的现场完全替代人,使得采取临时支护进行煤矿作业时伤亡率显著降低。
技术研发人员:谭建忠,姜建胜
受保护的技术使用者:智动时代(北京)科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!