一种油气井井筒安全的智能检测方法
本发明涉及人工智能,更具体地说,本发明涉及一种油气井井筒安全的智能检测方法。
背景技术:
1、油气田的勘探开发,存在着经济效益高、潜在风险高等特点。目前,受到国际低油价、提高采收率技术等因素的影响,很多生产井处在超期服役的状态,设备腐蚀老化、组织管理落后等原因造成的油气井生产安全问题日益严重。因此,油气井完整性管理作为一种新兴的概念被提出来,在国际大型石油公司中备受关注并且得以成功应用。此外,新井特别是深井超深井、高温高压井、海上油气井也同时面临着完整性破坏的风险,急需油气井完整性管理的开发应用。
2、通过对国内的油气井筒完整性管理,改善识别到的不利影响因素,延长老井的寿命周期,降低新井的破坏风险具有实际的意义,从而保证能够更高效、更安全地开采油气。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种油气井井筒安全的智能检测方法,通过压力趋势分析,预测和判断井筒完整性是否存在破坏,以解决上述背景技术中提出的问题。
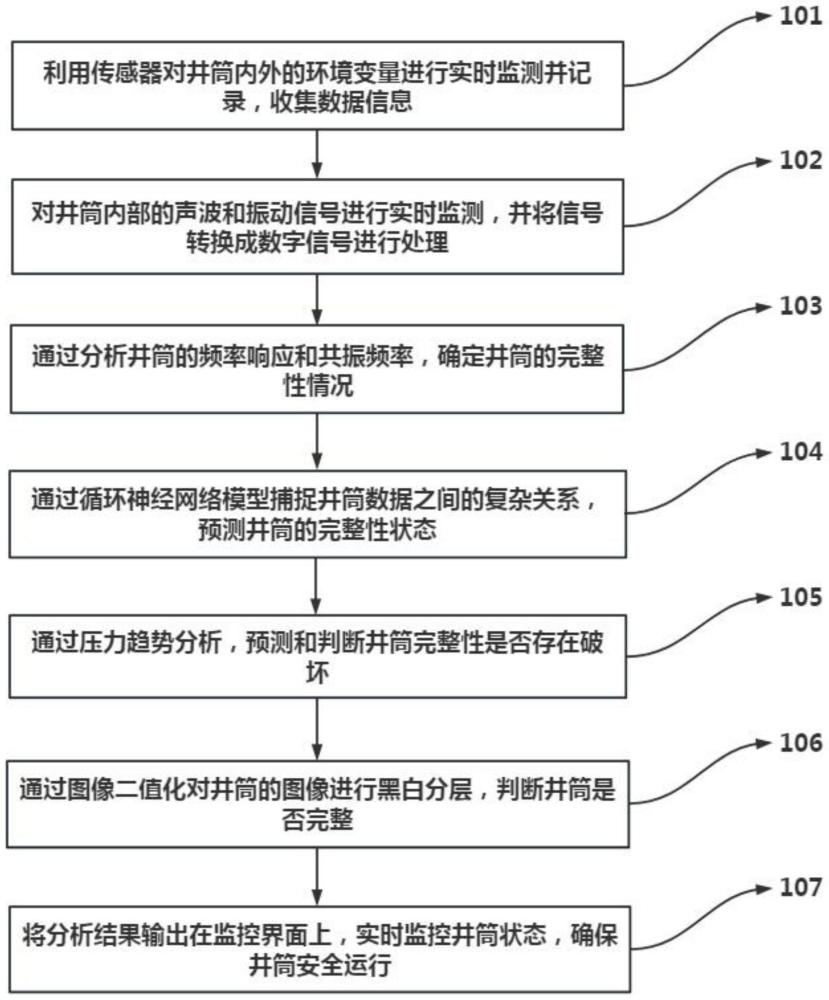
2、本发明解决上述技术问题的技术方案如下:一种油气井井筒安全的智能检测方法,具体包括以下步骤:
3、步骤101、利用传感器对井筒内外的环境变量进行实时监测并记录,收集数据信息;
4、步骤102、对井筒内部的声波和振动信号进行实时监测,并将信号转换成数字信号进行处理;
5、步骤103、通过分析井筒的频率响应和共振频率,确定井筒的完整性情况;
6、步骤104、通过循环神经网络模型捕捉井筒数据之间的复杂关系,预测井筒的完整性状态;
7、步骤105、通过压力趋势分析,预测和判断井筒完整性是否存在破坏;
8、步骤106、通过图像二值化对井筒的图像进行黑白分层,判断井筒是否完整;
9、步骤107、将分析结果输出在监控界面上,实时监控井筒状态,确保井筒安全运行。
10、在一个优选地实施方式中,所述步骤101中,通过安装倾斜仪和位移传感器,在井筒中实时监测,获取井筒结构参数以及套管与井壁之间的距离信息,利用温湿度传感器和应变片传感器对井筒内外的温度、湿度以及压力环境变量进行实时监测并记录,具体包括以下内容:
11、s1、倾斜仪和位移传感器:在井口位置安装倾斜仪和位移传感器,并与读取设备连接到监测设备上,通过倾斜仪测得倾角,根据套管半径计算出套管与井壁之间的距离,具体计算公式如下:
12、d=r×tan(θ)
13、其中,d表示套管与井壁之间的距离,θ表示倾角,r表示套管半径;
14、s2、应变片传感器:将应变片粘贴在井筒表面,当井筒内外发生应变,应变片会发生相应的变形,产生电阻变化,通过测量电阻值的变化,得到井筒内外的压力差,具体计算公式为:
15、
16、其中,δp表示压力差,δl表示应变片长度变化量,l表示应变片原始长度,k为敏感系数,e为应变片弹性模量,a为应变片横截面积;
17、s3、温湿度传感器:在井筒上部和下部各安装一个温湿度传感器,将传感器输出的温度和湿度信号接入数据采集系统,并记录下井筒内外的温湿度数据,通过比较温湿度差异的大小,初步判断井筒是否存在漏风、水分渗透以及蒸发情况,具体计算公式如下:
18、δt=t_in-t_out
19、δh=h_in-h_out
20、其中,δt表示井筒内外的温度差异,t_in表示井筒内部的温度,t_out表示井筒外部的温度;δh表示井筒内外的湿度差异,h_in表示井筒内部的湿度,h_out表示井筒外部的湿度。
21、在一个优选地实施方式中,所述步骤102中,通过声波传感器和振动传感器设备,对井筒内部的声波和振动信号进行实时监测,利用最小均方滤波器进行噪声去除,并将信号转换成数字信号进行处理,具体包括以下内容:
22、s1、最小均方滤波器:根据输入信号的统计特性来调整滤波器系数,以最小化误差的均方差,设置输入信号为x(n),期望输出信号为d(n),滤波器的系数为w(n),滤波器的输出为y(n),误差信号为e(n),定义为期望输出与实际输出之间的差距,具体计算公式如下:
23、w(n+1)=w(n)+μ×e(n)×x(n)
24、e(n)=d(n)-y(n)
25、其中,w(n+1)表示时刻n+1的滤波器系数,w(n)表示时刻n的滤波器系数,μ表示步长因子,控制滤波器系数的收敛速度和稳定性,e(n)表示时刻n的误差信号,x(n)表示时刻n的输入信号;
26、根据上述公式,通过不断迭代更新滤波器系数,使得误差逐渐减小,达到滤波噪声去除的目的;
27、s2、利用快速傅里叶变换算法将时域信号转换为频域信号,获取信号的频率分布情况,进行频谱分析,设置输入序列为x[n],其中n=0,1,2,...,n-1,具体计算公式为:
28、
29、其中,x[k]表示频域中的第k个频率成分,k=0,1,2,...,n-1;exp代表指数函数,j表示虚数单位,n表示输入序列的长度。
30、在一个优选地实施方式中,所述步骤103中,使用声波测量仪器对井筒进行声波激励,并记录声波的往返传播时间,获取井筒在不同频率下的振动情况,与正常状态下的频率进行比较,评估井筒完整性的改变,具体包括以下内容:
31、s1、频率响应:分析频率响应识别出受损部位在特定频率范围内的振动幅度和相位变化,步骤如下:
32、步骤1、振动幅度:结构在特定频率下的振动偏移量大小,用于评估结构的稳定性和可靠性,具体计算公式如下:
33、
34、其中,a(f)表示频率为f时的振动幅度;x(f)和y(f)分别代表结构的水平和垂直振动分量;
35、步骤2、相位变化:结构在特定频率下的振动偏移量与激励信号之间的时间差,用于确定结构的受损部位,并对损伤程度进行评估,具体计算公式如下:
36、
37、其中,θ(f)表示频率为f时的相位变化角度;
38、s2、共振频率:井筒在特定频率下发生共振的频率,当井筒出现损伤情况,共振频率会发生变化,通过声波测量井筒的共振频率,并与正常状态下的频率进行比较,评估井筒完整性的改变,具体步骤如下:
39、步骤1、确定正常状态下的频率:通过历史记录,确定井筒在正常状态下的共振频率范围;
40、步骤2、比较共振频率:将测量得到的共振频率与正常状态下的频率进行比较,出现共振频率超出正常范围,说明井筒的结构已经发生变化,存在损坏、裂缝问题;
41、步骤3、分析损伤程度:根据共振频率偏差的大小和方向,以及其他监测数据,进一步分析井筒受损的程度和位置,使用有限元分析算法确定具体的损伤范围和程度,具体计算公式如下:
42、
43、δω=ω-ω0
44、其中,k表示结构的刚度矩阵,m表示结构的质量矩阵,ω表示共振频率,ω0表示正常状态下的频率,δω表示共振频率偏差;取向角计算公式如
45、
46、其中,θ表示取向角,δωi表示第i个自由度的频率偏差,|δω|2表示所有自由度频率偏差的平方和。
47、在一个优选地实施方式中,所述步骤104中,根据任务要求和数据特点选择井深、井壁厚度、井筒材料,以及修井记录特征作为输入,得到目标数据集,利用梯度下降法进行模型训练,通过循环神经网络模型预测井筒的完整性状态,具体包括以下内容:
48、s1、数据划分:根据任务要求和数据特点选择井深、井壁厚度、井筒材料,以及修井记录特征作为输入,得到目标数据集,将数据集按照70%为训练集,15%为验证集以及15%的测试集比例进行划分;
49、s2、模型训练:确定rnn的网络结构,包括隐层的个数和每个隐层的单元数量,利用梯度下降法进行模型训练,最小化预测误差,具体步骤如下:
50、步骤1、定义损失函数:模型的输出为真实标签为yi;
51、步骤2、对于每个训练样本(x,y),通过交叉熵损失函数计算损失值loss,表示参数对损失函数的影响程度,具体计算公式如下:
52、
53、其中,loss表示损失函数,表示第i个样本属于正类的概率,yi表示第i个样本的真实标签,n表示样本数量;
54、步骤3、更新模型参数:根据计算得到的梯度,调整模型参数减小损失函数的值,通过学习率控制每次更新的步长,避免异常更新,对于模型的每个参数θ,具体计算公式为:
55、
56、其中,learning_rate表示学习率,控制每次参数更新的步长,是损失函数关于参数θ的偏导数,表示损失函数对参数的影响程度;
57、步骤4、重复步骤2和步骤3,直到达到停止条件;
58、s3、模型预测:输入新的井筒特征数据,利用训练好的模型进行最终的评估,对井筒的完整性状态进行预测,具体计算公式为:
59、
60、其中,rmse表示均方根误差,n表示测试集的样本数量,表示第i个测试样本的预测值,yi表示第i个测试样本的真实标签。
61、在一个优选地实施方式中,所述步骤105中,将压力传感器安装在井底位置,并实时测量和记录压力数据,利用机器学习算法应用于压力趋势分析,通过数据训练模型来预测和判断井筒完整性是否存在破坏,具体包括以下内容:
62、s1、数据准备:将压力传感器记录的压力数据作为训练数据集,包含压力值和对应的时间戳,从原始数据中提取特征,计算每个时间点上的压力变化率,具体计算公式如下:
63、
64、其中,δp表示压力的变化值,δt表示时间的变化值,p1和p2分别表示起始时间点和结束时间点的压力值,t1和t2分别表示起始时间点和结束时间点的时间值;
65、s2、模型训练:根据已知的井筒完整性状况,将每个样本标记为正常,使用训练数据集进行支持向量机模型训练,具体步骤如下:
66、步骤1、间隔最大化:在支持向量机中,找到一个能够将不同类别的样本分隔得最开的超平面,训练过程中,找到使得距离平面最近的样本点为支持向量,支持向量到超平面的距离表示为γ,间隔最大化的目标函数为:
67、maximize 2/||w||subjext yi(wt*xi+b)≥1,for all i
68、其中,yi表示第i个样本的标签,xi第i个样本的特征向量,w表示法向量,b表示偏置项;
69、步骤2、核函数转换:使用多项式核函数将输入特征向量映射到更高维的特征空间,在该特征空间中进行线性分类,具体计算公式如下:
70、k(x,y)=(γ*xt*y+r)d
71、其中,γ表示核函数参数,d表示多项式的次数,r表示常数项;
72、s3、预测和判断:使用训练好的模型对新的压力数据进行预测,并判断井筒完整性是否存在破坏,根据svm预测函数将新的数据点映射到超平面上,并根据位置来进行二元分类,具体计算公式如下:
73、y_pred=sign(wt*x+b)
74、其中,y_pred表示预测结果,x表示输入数据点的特征向量,w表示超平面的法向量,b表示偏置项,sign()函数表示将预测值转换为1、-1的符号函数;
75、当数据点位于超平面的正侧,y_pred大于0,被分类为正类,表示井筒完整性被破坏;
76、当数据点位于超平面的负侧,y_pred小于0,被分类为负类,表示井筒完整性正常。
77、在一个优选地实施方式中,所述步骤106中,使用相机设备进行拍摄,收集井筒的图像,通过图像二值化对井筒的图像进行黑白分层,使用边缘检测算法来提取井筒的边缘和轮廓,判断井筒是否完整,具体包括以下内容:
78、s1、图像二值化:将收集的图像转换为二值图像,分为黑色和白色两部分,具体步骤如下:
79、步骤1、对图像进行高斯滤波,使用高斯核函数对每个像素周围的邻域进行加权平均,平滑图像并降低噪声的影响,对于给定的像素(x,y)处,邻域大小为n×n,具体计算公式如下:
80、
81、其中,g(x,y)表示滤波后的像素值,i和j表示邻域范围内的像素坐标,遍历整个邻域,l(i,j)表示邻域内像素(i,j)处的原始灰度值,σ表示高斯核函数的标准差;
82、步骤2、利用自适应阈值法将所有像素进行分割对于每个像素(x,y)处,以当前像素为中心的固定大小的正方形邻域,计算其局部像素的平均值μ和标准差σ,具体计算公式如下:
83、t(x,y)=μ(x,y)-c×σ(x,y)
84、其中,t(x,y)表示像素(x,y)处的局部阈值,μ(x,y)表示像素(x,y)处的局部平均值,σ(x,y)表示像素(x,y)处的局部标准差,c表示可调参数,用于控制阈值的选择,取值范围为0.8~1.2;
85、将计算得到的局部阈值t(x,y)应用于图像,将像素灰度值大于等于阈值的设为白色,小于阈值的设为黑色,得到二值化图像;
86、s2、黑白分层:根据二值化后的图像,将其分为黑白两层,使用边缘检测算法来提取井筒的边缘和轮廓,具体步骤如下:
87、步骤1、计算图像的梯度幅值和方向:使用sobel算子计算每个像素的梯度幅值和方向,得到梯度图像,设置图像的水平方向梯度gx和垂直方向梯度gy,具体计算公式为:
88、gx(x,y)=l(x+1,y)-l(x-1,y)
89、gy(x,y)=l(x,y+1)-l(x,y-1)
90、其中,gx(x,y)和gy(x,y)表示图像在位置(x,y)处的水平和垂直方向梯度,l(x,y)表示图像在位置(x,y)处的灰度值;
91、梯度幅值g和方向θ的具体计算公式如下:
92、g(x,y)=sqrt(gx(x,y)2+gy(x,y)2)
93、θ(x,y)=arctan2(gy(x,y)+gx(x,y))
94、其中,g(x,y)表示图像在位置(x,y)处的梯度幅值;θ(x,y)表示图像在位置(x,y)处的梯度方向,以弧度表示;
95、步骤2、非最大抑制:在梯度图像上执行非最大抑制,将边缘细化为单像素宽度;
96、步骤3、双阈值处理:根据高阈值和低阈值对非最大抑制后的图像进行阈值处理,得到强边缘和弱边缘;
97、步骤4、边缘连接:通过连接强边缘和与之相连的满足一定条件的弱边缘,形成完整的边缘;
98、s3、判断完整性:根据黑白分层后的图像,使用轮廓检测算法寻找闭合的轮廓,针对每个检测到的轮廓,通过观察井筒的形状、边缘特征,利用完整的井筒具有相对较大的面积,不完整的井筒存在断裂的边缘特点,来判断井筒的完整性。
99、在一个优选地实施方式中,所述步骤107中,将分析结果输出在监控界面上,操作员实时监控井筒状态,及早发现井筒损坏并采取相应措施,包括增加通风、进行检修、加强支护方式,确保井筒安全运行,具体包括以下内容:
100、s1、实时数据显示:将传感器收集到的环境数据实时显示在一个监控界面上,操作员随时查看当前的温度、湿度、压力,以及振动数据;
101、s2、警报系统:设置警报系统,当某个环境指标超过设定的安全阈值,自动向操作员发送警报通知,及时采取相应的措施,具体步骤如下:
102、步骤1、确定安全阈值:针对每个环境指标,根据井筒的具体情况,设定一个安全阈值,包括温度上限、湿度上限、压力上限,以及振动上限;
103、步骤2、监测数据:通过传感器实时监测井筒环境数据,并将其与安全阈值进行比较;
104、步骤3、触发警报:当某个环境指标超过了设定的安全阈值,触发警报机制,系统通过手机短信、电子邮件以及电话呼叫方式自动向操作员发送警报通知;
105、s3、数据趋势分析:对历史数据进行分析和统计,生成趋势图,显示环境指标的变化趋势,利用移动平均算法,计算出相应的移动平均值,具体计算公式如下:
106、
107、其中,sma表示简单移动平均值,x1+x2+x3+...+xn表示相应的数据点,n表示参与计算的数据点的数量;
108、根据计算得到的移动平均值,绘制趋势图,横坐标为时间,纵坐标为环境指标,通过比对当前数据和历史趋势,判断井筒状态是否正常,并进行预测和提前准备。
109、本发明的有益效果是:通过安装倾斜仪和位移传感器,获取井筒结构参数,利用温湿度传感器和应变片传感器对井筒内外的温湿度以及压力环境变量进行实时监测,利用最小均方滤波器进行噪声去除,将信号转换成数字信号进行处理,对井筒进行声波激励,与正常状态下的频率进行比较,评估井筒完整性的改变,根据循环神经网络模型预测井筒的完整性状态,利用机器学习算法应用于压力趋势分析,预测和判断井筒完整性是否存在破坏,通过图像二值化对井筒的图像进行黑白分层,判断井筒是否完整,将分析结果输出在监控界面上,实时监控井筒状态,及早发现井筒损坏并采取措施,确保井筒安全运行。
- 还没有人留言评论。精彩留言会获得点赞!