一种隧道施工用通风状态监测机器人及其使用方法与流程
本发明涉及隧道施工,尤其涉及一种隧道施工用通风状态监测机器人及其使用方法。
背景技术:
1、隧道是指在地下或水下修建的通道,通常用于交通、水利、人防等工程中,隧道的建设可以解决地形限制和地质复杂等问题,提高交通运输效率和安全性,同时也有利于环境保护和节约土地资源,在隧道施工建设过程中需要对隧道内部进行通风,以排除有害气体、蒸气、粉尘和炮烟等有害物质,隧道通风过程中需要监测通风状态,包括各种有害气体浓度等指标,以保障施工安全。
2、目前隧道施工通风状态监测是通过在隧道内设置传感器进行监测,这种监测方式采样代表性有限,可能造成误判。
3、公开号cn114837745b公开了一种隧道施工用通风状态监测机器人,包括车体,车体的上端安装有机械臂,机械臂上安装有检测器,车体内设有设备腔,车体的前后两侧均设有安装槽,两个安装槽均过散热槽与设备腔相连通,两个安装槽内均设有滤网板,两个安装槽内均设有清洁机构,清洁机构包括设置在安装槽内的安装管组件,车体的上端设有箱体,箱体的上端设有储存槽,该装置通过设置机械臂和检测器等结构,能够多角度进行检测操作,使用起来灵活性较高,同时还设有清洁机构和震动机构等结构,能够自动对滤网板进行清洁,减少了后期人工维护的频率,并且还设有联动机构,提高了能源的利用率。
4、上述通风状态监测机器人具有以下缺陷:施工状态的隧道内部环境复杂,车体移动具有局限性,检测空间有限。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述的问题,提出了本发明。
3、因此,本发明目的是提供一种隧道施工用通风状态监测机器人及其使用方法,其用于解决现有技术对隧道通风状态检测局限性较强等问题。
4、为解决上述技术问题,本发明提供如下技术方案:一种隧道施工用通风状态监测机器人及其使用方法,包括:
5、主体,其包括安装管、连接仓、风叶和a链轮,所述连接仓固定连接在安装管内侧并且一端贯穿安装管,所述风叶具有转轴,所述风叶转轴与连接仓转动连接并且贯穿连接仓外币,所述a链轮设置在连接仓内并且与风叶转轴固定连接,所述安装管位于安装管外的一侧具有开口;
6、传动机构,其包括外壳、a传动齿轮、b链轮、主动拨盘、从动槽轮、b传动齿轮和a连接板条,所述外壳设置在安装管外侧,所述外壳内设置有活动腔,所述a传动齿轮、主动拨盘、从动槽轮和b传动齿轮均设置在外壳内侧,所述a传动齿轮转轴与外壳转动连接并且贯穿外壳,所述b链轮与a传动齿轮转轴固定连接,所述a链轮与b链轮通过链条传动,所述主动拨盘转轴与外壳转动连接,所述b传动齿轮与主动拨盘转轴固定连接并且与a传动齿轮相互啮合,所述从动槽轮转轴与外壳转动连接并且伸入活动腔内,所述从动槽轮与主动拨盘传动连接,所述a连接板条与安装管固定连接,所述外壳与a连接板条固定连接并且贯穿a连接板条;
7、检测机构,其包括采样罐、检测罐、b连接板条、往复丝杆、丝杆螺母、活塞杆、主动活塞、从动活塞、轻触开关、检测模块、a单向阀、b单向阀、连通管和c单向阀,所述采样罐和风叶并排设置在安装管外侧,所述采样罐与丝杆螺母位置正对设置,所述b连接板条设置有两组,两组所述b连接板条均与安装管固定连接,所述采样罐和检测罐均与两组b连接板条固定连接并且穿过两组b连接板条,所述往复丝杆设置在活动腔内并且与从动槽轮转轴固定连接,所述丝杆螺母与往复丝杆传动连接,所述主动活塞滑动设置在采样罐内,所述活塞杆设置有两组,两组所述活塞杆均与丝杆螺母固定连接,两组所述活塞杆均与外壳、采样罐滑动连接并且贯穿采样罐、采样罐,两组所述活塞杆远离丝杆螺母的一端均与主动活塞固定连接,所述从动活塞滑动设置在检测罐内,所述轻触开关与检测罐一侧内壁固定连接,所述检测模块与检测罐外壁固定连接,所述a单向阀和c单向阀均固定连通在检测罐远离轻触开关的一侧,所述b单向阀与安装管固定连通,所述连通管设置有两组,两组所述连通管其中一端均固定连通在采样罐远离丝杆螺母的一侧,两组所述连通管另一端分别与a单向阀、b单向阀固定连通,所述检测罐表面具有与检测模块检测探头契合的安装孔,所述检测模块探头安装在该安装孔内侧,所述检测模块与轻触开关电性连接,所述采样罐与检测罐之间还设置有连通管,所述连通管两端分别与采样罐、检测罐固定连通,所述连通管位于主动活塞靠近丝杆螺母的一侧;
8、其中,所述a传动齿轮与b传动齿轮的传动比小于一,所述检测模块用于检测危险气体,所述检测模块与上位机通讯连接,所述b单向阀的导通方向为自安装管到连通管方向导通,所述a单向阀的导通方向为自连通管到检测罐方向导通,所述c单向阀的导通方向为自检测罐到外界方向导通,所述从动活塞按压轻触开关时检测模块位于从动活塞背对轻触开关的一侧。
9、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述风叶与安装管轴线重合设置,所述连接仓位于安装管的中轴线上。
10、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述a传动齿轮与b传动齿轮的传动比具体为1/4,所述从动槽轮具体为六槽槽轮。
11、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述采样罐与检测罐尺寸规格相同,所述主动活塞与从动活塞尺寸规格相同。
12、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述连接仓和外壳均由不锈钢材料制成,所述连接仓和外壳表面还涂覆有防腐涂料。
13、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述采样罐和检测罐均由不锈钢材料制成,所述采样罐和检测罐表面均涂覆有防腐涂料。
14、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述丝杆螺母远离从动槽轮至最大距离时主动活塞背对丝杆螺母的一侧刚好与采样罐贴合。
15、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:两组所述活塞杆均由不锈钢材料制成并且表面光滑,两组所述活塞杆位置对称设置。
16、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:所述轻触开关具体为按压式轻触开关,所述连通管为软管。
17、作为本发明所述一种隧道施工用通风状态监测机器人及其使用方法的一种优选方案,其中:具体包括以下步骤:
18、s1,将安装管两端与通风管连通;
19、s2,通风时,通风管内气流带动风叶转动,风叶带动a链轮转动,a链轮通过链条带动b链轮转动,b链轮带动b链轮转动,b链轮带动b传动齿轮转动,b传动齿轮带动主动拨盘转动,主动拨盘带动从动槽轮转动,从动槽轮带动往复丝杆间歇转动,往复丝杆间歇转动带动丝杆螺母沿往复丝杆做间歇式的往复运动,丝杆螺母通过两组活塞杆带动主动活塞同步移动;
20、s3,主动活塞向丝杆螺母方向移动时通过b连接板条和b单向阀间歇性的将安装管内气体抽入采样罐内,在气压作用下,从动活塞向远离丝杆螺母方向间歇性移动,检测罐内气体从c单向阀被排出,主动活塞向远离丝杆螺母方向方向移动时间歇性的将采样罐内气体压入检测罐内,从动活塞在气压作用下间歇性移动,采样罐内气体在检测罐内混合,当从动活塞触及轻触开关时,检测模块对检测罐内有毒气体含量进行检测并将检测结果发送至上位机。
21、本发明的有益效果:
22、1.通过设置与通风管道连通的通风状态监测机器人在隧道通风机抽吸时检测通风管道内有害气体浓度,进而反映隧道内部有害气体浓度情况,相较于移动式的机器人,解决了检测空间受限的问题。
23、2.通过设置传动机构与检测机构配合间歇性的进行气体采样,并对采集的气体样本混合后进行检测,利于降低异常样本对检测结果的影响,利于提高检测结果的可信度。
24、3.装置通过隧道通风机产生的风力进行驱动,提高了资源利用率,利于节约能源。
25、附图说明
26、为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
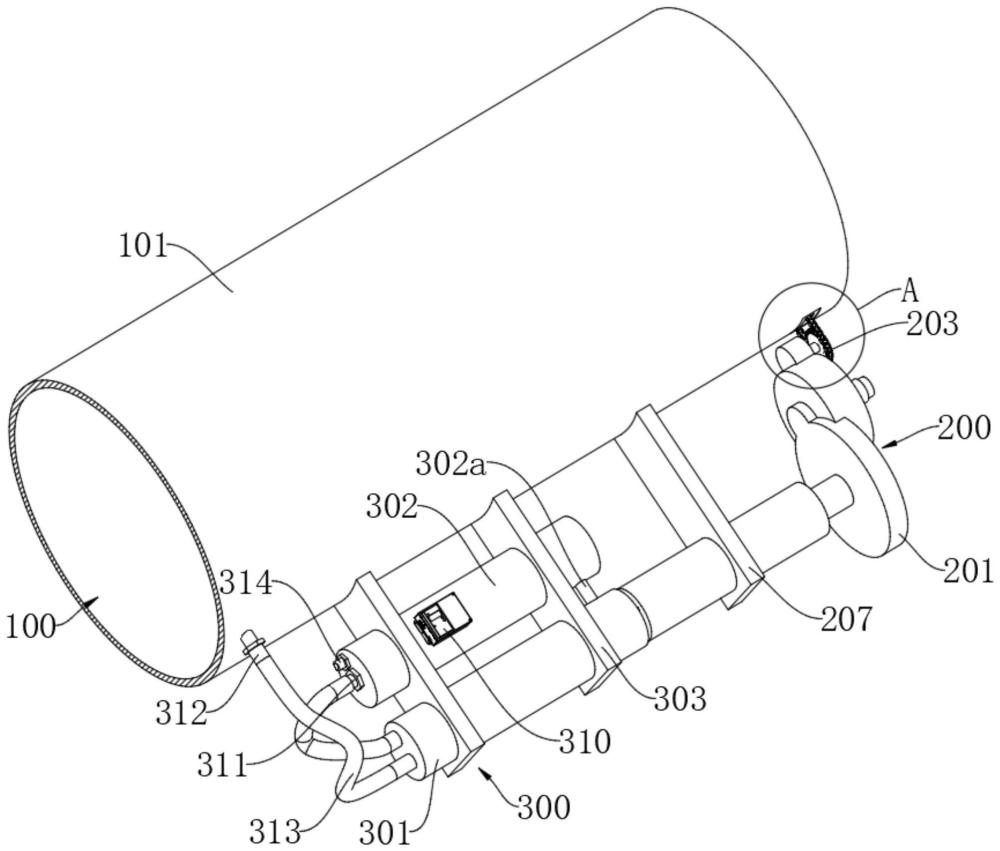
27、图1为本发明一种隧道施工用通风状态监测机器人的整体结构示意图。
28、图2为本发明图1中a区域结构放大图。
29、图3为本发明一种隧道施工用通风状态监测机器人的部分立体剖视结构示意图。
30、图4为本发明图3中b区域结构放大图。
31、图5为本发明一种隧道施工用通风状态监测机器人的部分剖视结构示意图。
32、图6为本发明一种隧道施工用通风状态监测机器人的侧视结构示意图。
33、图7为本发明一种隧道施工用通风状态监测机器人的传动机构部分立体结构示意图。
34、图8为本发明图7中c区域结构放大图。
- 还没有人留言评论。精彩留言会获得点赞!