一种连采机运动纠偏方法和系统与流程
本发明涉及工业控制,具体涉及一种连采机运动纠偏方法和系统。
背景技术:
1、连采机割煤采煤过程中,由于操作步骤是逐步进行的,需要先升起截割滚筒,然后向前牵引,接着让滚筒下降割煤采煤,割到底后再向后退拉底,然后重复以上步骤。由于工作面较远且不是连续行走,操作人员依靠经验和一些简单的参照物来操作连采机,很难准确判断割煤采煤的路线是否平直。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种连采机运动纠偏方法和系统,以解决相关技术中难以准确判断采煤路线是否平直的问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、根据本发明的第一方面,提供了一种连采机运动纠偏方法,包括:
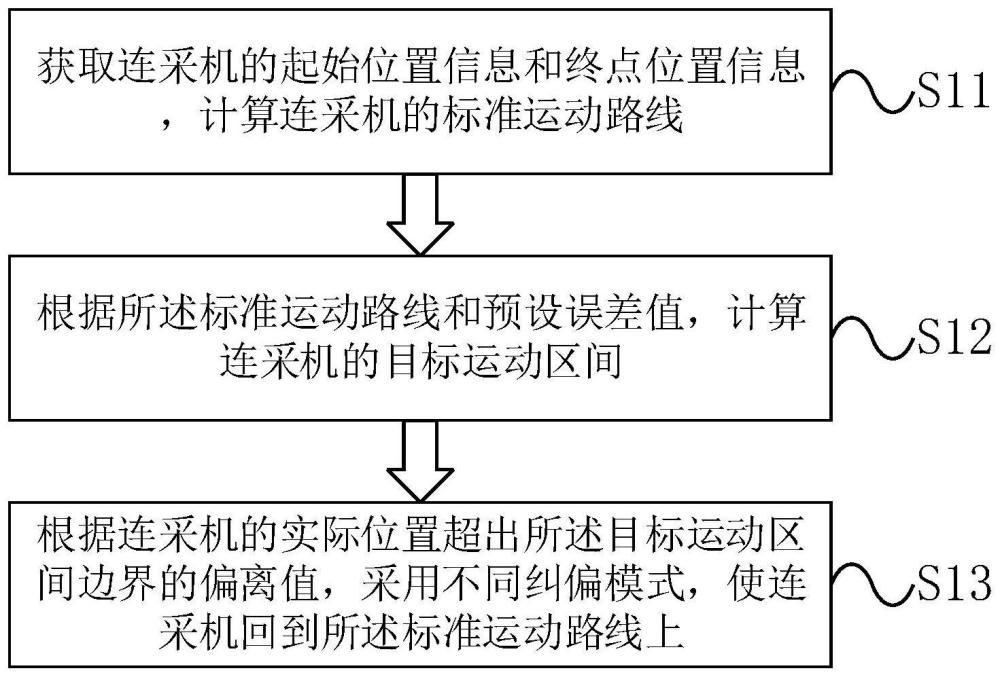
4、获取连采机的起始位置信息和终点位置信息,计算连采机的标准运动路线;
5、根据所述标准运动路线和预设误差值,计算连采机的目标运动区间;
6、根据连采机的实际位置超出所述目标运动区间边界的偏离值,采用不同纠偏模式,使连采机回到所述标准运动路线上。
7、优选地,所述计算连采机的标准运动路线的方法包括:
8、连接连采机的起始位置和终点位置,得到连采机的标准运动路线;
9、根据预设等分距离,将所述标准运动路线等分,获取等分点位置信息数组,所述等分点位置信息数组用于表示所述标准运动路线。
10、优选地,所述计算连采机的目标运动区间的方法包括:
11、计算所述预设误差值的经度分量和纬度分量;
12、根据所述经度分量、纬度分量和等分点位置信息数组,计算左运动边界和右运动边界,所述左运动边界和右运动边界之间的区域为连采机的目标运动区间。
13、优选地,所述根据连采机的实际位置超出所述目标运动区间边界的偏离值,采用不同纠偏模式具体为:
14、若连采机的实际位置超出目标运动区间边界的偏离值小于等于预设偏离阈值,则采用第一纠偏模式,在一次采煤过程中即可完成纠偏;
15、若连采机的实际位置超出目标运动区间边界的偏离值大于预设偏离阈值,则采用第二纠偏模式,经过多次采煤过程完成纠偏。
16、优选地,所述第一纠偏模式包括:
17、若连采机的当前位置超出左运动边界,则控制连采机向右转,直至连采机回到所述标准运动路线上,连采机保持正向前进;
18、和/或,若连采机的当前位置超出右运动边界,则控制连采机向左转,直至连采机回到所述标准运动路线上,连采机保持正向前进。
19、优选地,所述第二纠偏模式包括:
20、待当前采煤过程结束后,获取实际运动路线;
21、以所述实际运动路线作为参照线,计算下一次采煤过程中连采机的纠偏路线。
22、优选地,所述计算下一次采煤过程中连采机的纠偏路线的方法包括:
23、根据所述参照线,计算纠偏次数;
24、根据纠偏次数,计算所述参照线上每个点在单次采煤中的纠偏距离;
25、根据所述纠偏距离,计算所述参照线上的点在经过一次采煤后的对应位置,将所有对应位置连线,得到下一次采煤过程的纠偏路线。
26、优选地,所述计算纠偏次数的方法包括:
27、获取所述参照线上距离煤田最远的点,并计算所述距离煤田最远的点与所述标准运动路线的垂直距离;
28、根据所述垂直距离和预设纠偏距离,计算得到纠偏次数。
29、优选地,所述方法还包括:
30、每完成一次采煤过程,重新计算下一次采煤过程的纠偏路线;
31、直至所述纠偏路线与标准运动路线重合,控制第二纠偏模式结束。
32、根据本发明的第二方面,提供了一种连采机运动纠偏系统,包括:
33、上述连采机运动纠偏方法。
34、本发明的实施例提供的技术方案可以包括以下有益效果:
35、通过获取连采机的起始位置信息和终点位置信息,计算连采机的标准运动路线,根据所述标准运动路线和预设误差值,计算连采机的目标运动区间,根据连采机的实际位置超出所述目标运动区间边界的偏离值,采用不同纠偏模式,使连采机回到所述标准运动路线上,能够有效检测连采机的运动路线是否偏出目标运动区间,并控制连采机沿着平直的路线进行采煤。
技术特征:
1.一种连采机运动纠偏方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述计算连采机的标准运动路线的方法包括:
3.根据权利要求2所述的方法,其特征在于,所述计算连采机的目标运动区间的方法包括:
4.根据权利要求3所述的方法,其特征在于,所述根据连采机的实际位置超出所述目标运动区间边界的偏离值,采用不同纠偏模式具体为:
5.根据权利要求4所述的方法,其特征在于,所述第一纠偏模式包括:
6.根据权利要求5所述的方法,其特征在于,所述第二纠偏模式包括:
7.根据权利要求6所述的方法,其特征在于,所述计算下一次采煤过程中连采机的纠偏路线的方法包括:
8.根据权利要求7所述的方法,其特征在于,所述计算纠偏次数的方法包括:
9.根据权利要求6~8中任一项所述的方法,其特征在于,还包括:
10.一种连采机运动纠偏系统,其特征在于,包括:
技术总结
本发明提供了一种连采机运动纠偏方法和系统,通过获取连采机的起始位置信息和终点位置信息,计算连采机的标准运动路线,根据所述标准运动路线和预设误差值,计算连采机的目标运动区间,根据连采机的实际位置超出所述目标运动区间边界的偏离值,采用不同纠偏模式,使连采机回到所述标准运动路线上,能够有效检测连采机的运动路线是否偏出目标运动区间,并控制连采机沿着平直的路线进行采煤。
技术研发人员:李九江,张文琦,高俊光,王志洋,孙鹏飞,马建强,陈俊鹏,牛耀峰,李静飞,乔晓变,侯佳宾,史小慧,张加利,王鹏,云俊杰,高宇
受保护的技术使用者:郑州煤机智能工作面科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!