一种混凝土罐车及喷湿台车组合放料控制系统及方法与流程
本发明涉及隧道施工领域,具体涉及一种混凝土罐车及喷湿台车组合放料控制系统及方法。
背景技术:
1、混凝土湿喷是隧道支护环节的一个关键工序,目前混凝土罐车和湿喷放料设备配合操作需要人工进行。人工操作存在以下弊端:(1)人工放料操作无法稳定地做到与混凝土湿喷台车喷射速度相匹配,放料过慢容易造成湿喷台车吸空导致喷射不平整,放料过快料斗溢出混凝土浪费现象,增加施工成本;(2)现场环境多粉尘,对工人身体危害大;(3)随着自动湿喷设备的出现,虽然湿喷台车可以实现自动作业,但现有的放料手段造成无法真正做到整个喷射混凝土工序的无人操作。
2、近年来随着科技的发展进步逐渐出现了混凝土自动浇筑等控制方面的研究,如cn116084700a,涉及一种自动浇筑机器人和输送泵的联动控制,但未涉及到与混凝土下料装置配合控制的研究,且目前尚未应用于隧道喷射支护领域。
3、因此亟需一种下料速度与泵送速度相匹配的系统。
技术实现思路
1、本发明为解决现有混凝土罐车和湿喷放料设备配合操作存在下料速度与泵送速度不匹配的问题,提供了一种混凝土罐车及喷湿台车组合放料控制系统及方法,通过无线通信模块、放料控制模块和料斗监控模块完成混凝土罐车和喷湿台车的通信和控制,结合方法部分采用两重闭环控制使泵送速度匹配下料速度。
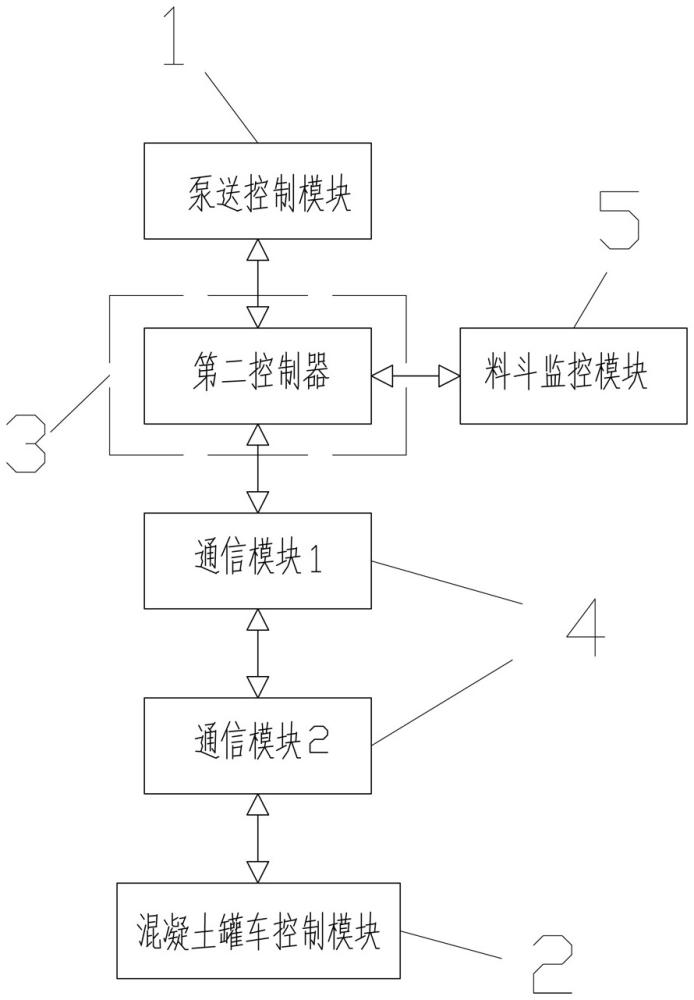
2、为了解决上述问题,本发明第一方面提出一种混凝土罐车及喷湿台车组合放料控制系统,包括泵送控制模块和混凝土罐车控制模块,所述泵送控制模块通信连接有放料控制模块,所述放料控制模块与混凝土罐车控制模块之间设置有无线通信模块,放料控制模块与混凝土罐车控制模块通过无线通信模块通信连接,所述放料控制模块还通信连接有料斗监控模块;
3、泵送控制模块包括第一控制器、泵送速度传感器、泵送压力传感器和正反转控制电路,第一控制器的输入端连接泵送速度传感器和泵送压力传感器的输出端,第一控制器通过正反转控制电路电性连接有输送泵;
4、放料控制模块包括第二控制器,所述第二控制器用于对第一控制器发送控制指令,并对第一控制器进行监控;
5、所述混凝土罐车控制模块包括第三控制器、转速传感器、搅拌执行器、速度控制器和存储器;
6、所述第三控制器通过无线通信模块通信连接第二控制器,第三控制器通过速度控制器调节下料速度,所述转速传感器的输出端与第三控制器的输入端连接,第三控制器通信连接存储器。
7、放料控制模块通过无线通信模块将泵送控制模块和混凝土罐车控制模块通信连接,接着接收泵送控制模块的转速以及泵送状态,并读取混凝土罐车控制模块的下料速度;并通过料斗监控模块对下料情况进行检测,为采用一种混凝土罐车及喷湿台车组合放料控制方法提供硬件基础。
8、进一步地,所述无线通信模块包括通信模块1和通信模块2,所述通信模块1与第二控制器电性连接,所述通信模块2与第三控制器电性连接;
9、通信模块1和通信模块2包括蓝牙模块、rfid模块、wifi模块中的一种或多种组合。
10、进一步地,所述料斗监控模块包括智能识别摄像头,所述智能识别摄像头与所述第二控制器通信连接。
11、进一步地,料斗监控模块还包括料斗,所述料斗的上部设置有筛网,所述筛网斜设于料斗内部,且与料斗固定,筛网处于所述智能识别摄像头的摄像范围内,智能识别摄像头与料斗的上端面固定。
12、本发明第二方面提出一种混凝土罐车及喷湿台车组合放料控制方法,其特征在于,包括:
13、步骤1:放料控制模块发送配对指令给通信模块1,通信模块1与通信模块2配对,完成通信模块1和通信模块2无线通信;
14、步骤2:通过料斗监控模块检测混凝土罐车放料口到达料斗位置,并发送到位信号给放料控制模块;
15、步骤3:泵送控制模块进行正泵控制,通过泵送速度传感器读取泵送速度,泵送控制模块将泵送速度传输至放料控制模块;
16、步骤4:混凝土罐车控制模块控制搅拌执行器、速度控制器进行下料,混凝土罐车控制模块读取存储器内下料速度,并将下料速度通过通信模块2传输至放料控制模块;
17、步骤5:放料控制模块通过泵送速度采用闭环算法对下料速度进行修正,放料控制模块将修正后的下料速度发送混凝土罐车控制模块,使下料速度与泵送速度匹配。
18、进一步地,所述步骤2还包括:
19、通过料斗监控模块未检测到混凝土罐车放料口到达料斗位置,并发送移位信号给放料控制模块;
20、放料控制模块对泵送控制模块发送停止泵送控制信号。
21、进一步地,所述步骤3还包括:
22、通过泵送控制模块发送泵送状态,当泵送控制模块进行反泵或停止泵送控制,放料控制模块在接收反泵或停止泵控制信号后通过通信模块1对混凝土罐车控制模块发送反转信号;
23、混凝土罐车控制模块通过通信模块2接收反转信号,并控制搅拌执行器反转。
24、进一步地,还包括:
25、步骤6:智能识别摄像头获取筛网的图像,并将图像传送至放料控制模块,放料控制模块对图片中混凝土进行灰度处理,并计算灰度图像的面积,进而得到图像中混凝土覆盖筛网面积值;
26、步骤7:放料控制模块内设置有混凝土覆盖筛网面积上限值和下限值,比较上限值和图像中混凝土覆盖筛网面积值,若图像中混凝土覆盖筛网面积值大于上限值,放料控制模块对混凝土罐车控制模块发动加速信号;
27、比较下限值和图像中混凝土覆盖筛网面积值,若图像中混凝土覆盖筛网面积值小于下限值,放料控制模块对混凝土罐车控制模块发动减速信号。
28、通过上述技术方案,本发明的有益效果为:
29、1.本发明的系统部分实现放料控制模块和混凝土罐车控制模块的通信连接及控制。设置放料控制模块,放料控制模块与泵送控制模块通信连接,放料控制模块通过无线通信模块与混凝土罐车控制模块采用无线手段连接,从而放料控制模块可以读取到混凝土罐车控制模块存储的下料速度,以及泵送控制模块检测到的泵送速度。放料控制模块还与料斗监控模块通信连接,可以进一步获取放料控制模块和混凝土罐车控制模块作业情况。
30、2.本发明通过一种混凝土罐车及喷湿台车组合放料控制方法,实现了下料速度与泵送速度相匹配。首先控制模块通过泵送速度对下料速度进行修正,采用闭环控制,对混凝土罐车控制模块发送修正后的下料速度,混凝土罐车控制模块通过速度控制器实现下料速度调节。
31、除此之外,采用料斗监控模块获取滤网的图像,根据图像中混凝土覆盖筛网面积的大小判断泵送速度和下料速度是否匹配,并控制混凝土罐车控制模块进行对应的速度调节,实现下料速度与泵送速度相匹配。
技术特征:
1.一种混凝土罐车及喷湿台车组合放料控制系统,包括泵送控制模块(1)和混凝土罐车控制模块(2),其特征在于,所述泵送控制模块(1)通信连接有放料控制模块(3),所述放料控制模块(3)与混凝土罐车控制模块(2)之间设置有无线通信模块(4),放料控制模块(3)与混凝土罐车控制模块(2)通过无线通信模块(4)通信连接,所述放料控制模块(3)还通信连接有料斗监控模块(5);
2.根据权利要求1所述的一种混凝土罐车及喷湿台车组合放料控制系统,其特征在于,所述无线通信模块(4)包括通信模块1和通信模块2,所述通信模块1与第二控制器电性连接,所述通信模块2与第三控制器电性连接;
3.根据权利要求1所述的一种混凝土罐车及喷湿台车组合放料控制系统,其特征在于,所述料斗监控模块(5)包括智能识别摄像头(501),所述智能识别摄像头(501)与所述第二控制器通信连接。
4.根据权利要求3所述的一种混凝土罐车及喷湿台车组合放料控制系统,其特征在于,料斗监控模块(5)还包括料斗(502),所述料斗(502)的上部设置有筛网(6),所述筛网(6)斜设于料斗(502)内部,且与料斗(502)固定,筛网(6)处于所述智能识别摄像头(501)的摄像范围内,智能识别摄像头(501)与料斗(502)的上端面固定。
5.基于权利要求1~4任一项所述的一种混凝土罐车及喷湿台车组合放料控制系统的混凝土罐车及喷湿台车组合放料控制方法,其特征在于,包括:
6.根据权利要求5所述的一种混凝土罐车及喷湿台车组合放料控制方法,其特征在于,所述步骤2还包括:
7.根据权利要求6所述的一种混凝土罐车及喷湿台车组合放料控制方法,其特征在于,所述步骤3还包括:
8.根据权利要求5所述的一种混凝土罐车及喷湿台车组合放料控制方法,其特征在于,还包括:
技术总结
本发明涉及一种混凝土罐车及喷湿台车组合放料控制系统及方法,泵送控制模块和混凝土罐车控制模块,所述泵送控制模块通信连接有放料控制模块,所述放料控制模块与混凝土罐车控制模块之间设置有无线通信模块,放料控制模块与混凝土罐车控制模块通过无线通信模块通信连接,所述放料控制模块还通信连接有料斗监控模块。本发明通过无线通信模块、放料控制模块和料斗监控模块完成混凝土罐车和喷湿台车的通信和控制,结合方法部分采用两重闭环控制使下料速度与泵送速度匹配。
技术研发人员:王豪,付文清,郜伟,邢泊,马紫昆,杜孟超,刘永磊,徐建华,王成林,李胜永,魏志豪,王云飞,赵亚杰,盖琛,李光朋
受保护的技术使用者:中铁工程装备集团隧道设备制造有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!