综采工作面及两巷设备的协同控制系统的制作方法
本申请涉及煤矿,尤其涉及一种综采工作面及两巷设备的协同控制系统。
背景技术:
1、随着综采工作面技术的发展,限制煤矿快速、高效、自动化、智能化开采的阻碍由工作面内部逐渐向两巷延伸。与综采工作面液压支架电液控制系统自动化、智能化控制方式相比而言,煤矿顺槽巷道支护与辅助运输设备,以及工作面与两巷的设备快速协同推进已成为严重制约煤矿生产发展的薄弱环节随着技术的不断进步。
2、在综采工作面两巷设备联动控制设计中,现有技术多采用工业以太网通讯,由监控中心主机做调度,下发指令到各个设备,让各个设备去动作。或者通过视频监控系统,在监控中心通过视频远程实时监控超前架设备,人工远程控制超前支架进行简单动作。以上技术方式当出现井下网络拥堵或者网络故障时,现场就完全无法继续使用,仍需要人工就近操作。并且现阶段监控中心只是将各个设备的一些传感信息进行显示,并没有分析设备状态是否适合联动,各设备间缺少闭环反馈。
技术实现思路
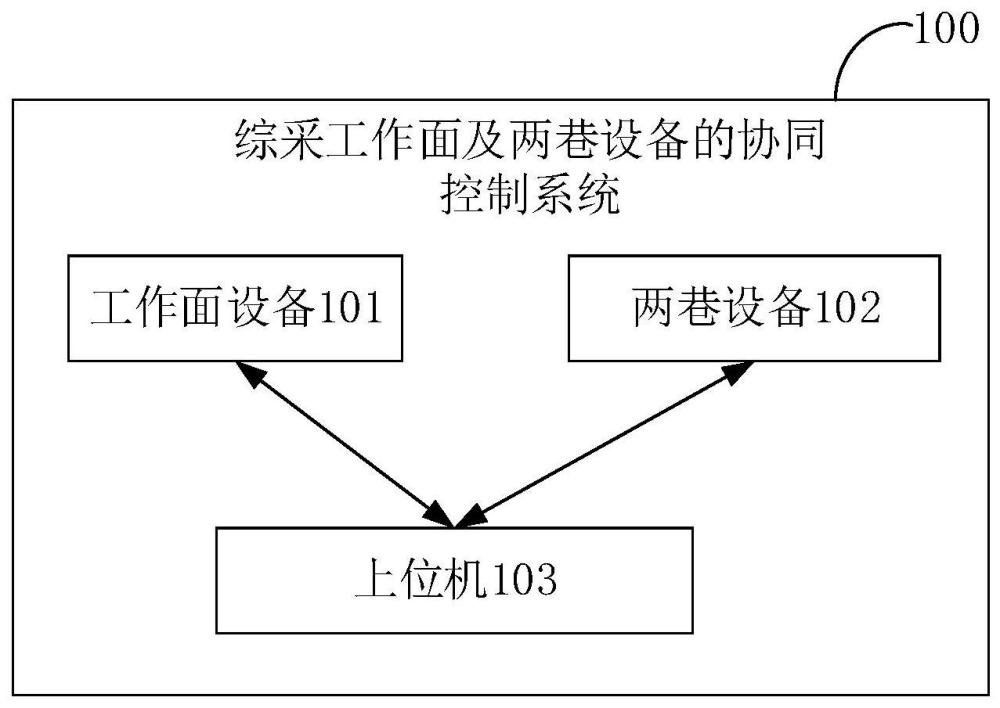
1、本申请第一方面实施例提出了一种综采工作面及两巷设备的协同控制系统,包括:工作面设备、两巷设备及上位机;
2、所述工作面设备及所述两巷设备,用于根据采煤机的位置、运行方向及工艺阶段,确定自身的联动动作,根据自身的初始状态,确定是否触发所述联动动作,并根据是否触发所述联动动作,确定自身的联动状态,向所述上位机上报所述联动状态;
3、所述上位机,用于根据所述采煤机的位置、所述运行方向、所述工艺阶段及所述初始状态,确定每个所述工作面设备及每个所述两巷设备分别对应的目标状态;并根据所述目标状态及所述联动状态,确定异常设备,向所述异常设备发送调度指令,所述调度指令用于对所述异常设备进行联动调度。
4、本申请提供的综采工作面及两巷设备的协同控制系统,所述工作面设备及所述两巷设备,根据采煤机的位置、运行方向及工艺阶段,确定自身的联动动作,根据自身的初始状态,确定是否触发所述联动动作,并根据是否触发所述联动动作,确定自身的联动状态,向所述上位机上报所述联动状态;所述上位机,根据所述采煤机的位置、所述运行方向、所述工艺阶段及所述初始状态,确定每个所述工作面设备及每个所述两巷设备分别对应的目标状态;并根据所述目标状态及所述联动状态,确定异常设备,向所述异常设备发送调度指令。由此,可以实时对设备的状态进行监测,在确定异常设备之后,及时向异常设备发送调度指令,降低了设备误联动而导致设备损坏的风险,提高了设备联动的准确性。
5、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种综采工作面及两巷设备的协同控制系统,其特征在于,包括:工作面设备、两巷设备及上位机;
2.根据权利要求1所述的系统,其特征在于,
3.根据权利要求1所述的系统,其特征在于,所述工作面设备及所述两巷设备通过以太网通讯线路或者can总线通讯线路与所述上位机进行通信。
4.根据权利要求3所述的系统,其特征在于,
5.根据权利要求1所述的系统,其特征在于,所述上位机中包括存储模块,所述存储模块用于存储所述工作面设备及所述两巷设备上报的联动状态,及所述调度指令。
6.根据权利要求1所述的系统,其特征在于,所述初始状态,包括以下至少一项:
7.根据权利要求1所述的系统,其特征在于,所述两巷设备包括回风巷超前支架及进风巷超前支架;
8.根据权利要求7所述的系统,其特征在于,所述在第二时间段内控制所述超前支架组移动,包括:
9.根据权利要求7所述的系统,其特征在于,所述超前支架推移流程还包括:
10.根据权利要求9所述的系统,其特征在于,所述上位机中包括预警模块,
技术总结
本申请提出一种综采工作面及两巷设备的协同控制系统,其中,包括:工作面设备、两巷设备及上位机;工作面设备及两巷设备,用于根据采煤机的位置、运行方向及工艺阶段,确定自身的联动动作,根据自身的初始状态,确定是否触发联动动作,并根据是否触发联动动作,确定自身的联动状态,向上位机上报联动状态;上位机,用于根据采煤机的位置、运行方向、工艺阶段及初始状态,确定每个工作面设备及每个两巷设备分别对应的目标状态;并根据目标状态及联动状态,确定异常设备,向异常设备发送调度指令,调度指令用于对异常设备进行联动调度。由此,降低了设备误联动而导致设备损坏的风险,提高了设备联动的准确性。
技术研发人员:许兴祖,魏文艳,张飞超,王皓宇,骆秦,薛文强,李九州,吴桐,何勇华,黄曾华
受保护的技术使用者:北京天玛智控科技股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!