摆动阀脉冲器的水力转矩的计算方法和装置与流程
本发明属于摆动阀脉冲器,具体涉及一种摆动阀脉冲器的水力转矩的计算方法和装置。
背景技术:
1、随钻测井是指测井仪器在钻进时,对井下的工程参数和地质参数进行测量并上传。在钻进过程中,井下测量传感器测得工程参数及地层参数,将这些测得的参数(通常为模拟信号),通过数据编码器,转换为数字信号,数字信号经过控制电路调制,调制后的控制信号将传递给驱动电路,驱动电路驱动控制电动机运动,电动机按着控制电路给定的控制信号进行运动,带动摆动阀泥浆脉冲发生器(摆动阀脉冲器)的转子按照相应的轨迹旋转或摆动,摆动阀脉冲器的转子剪切流经的流体,产生泥浆压力波信号;这些泥浆压力波信号经过钻杆内泥浆传输到地面立管上,数据采集系统对地面立管上压力传感器进行压力信号采集,通过解调系统对采集的压力信号进行解析,最终将传输上来的泥浆压力波信号转换为井下工程参数和地层参数。
2、摆动阀脉冲器的结构示意图如图1所示,其核心部件是转子4和定子3,转子4通过扭杆2和永磁同步电机1的转子连接在一起,当上电控制永磁同步电机1摆动时,永磁同步电机1就通过扭杆2拖动转子4做往复式摆动,进而剪切泥浆流体,产生泥浆脉冲压力波。
3、对于摆动阀脉冲器而言,水力转矩是摆动阀脉冲器在井下工作时需要克服的主要负载转矩,深入研究转子的水力负载特性对改善摆动阀脉冲器的结构和控制性能、减少电机功率消耗、提高泥浆脉冲信号的数据传输速率和传输距离具有一定的指导意义。
4、目前国内外对于摆动阀脉冲器的转子的水力转矩的研究和计算主要从流体力学的角度出发,利用流体仿真软件计算摆动阀脉冲器的转子静止时的稳态水力转矩,进而对摆动阀脉冲器工作时的水力转矩做进一步分析。但目前通过仿真计算得到的水力转矩均存在以下两个问题:1)在建立流场仿真模型时,为了便于计算和分析,均需要对模型简化处理,因而影响了计算的准确性;2)摆动阀脉冲器在井下工作时转子保持运动状态,转子运动时动态水力转矩和静止时的稳态水力转矩存在明显差异。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种摆动阀脉冲器的水力转矩的计算方法及装置、计算设备及计算机存储介质。
2、根据本发明的一个方面,提供了一种摆动阀脉冲器的水力转矩的计算方法,包括:
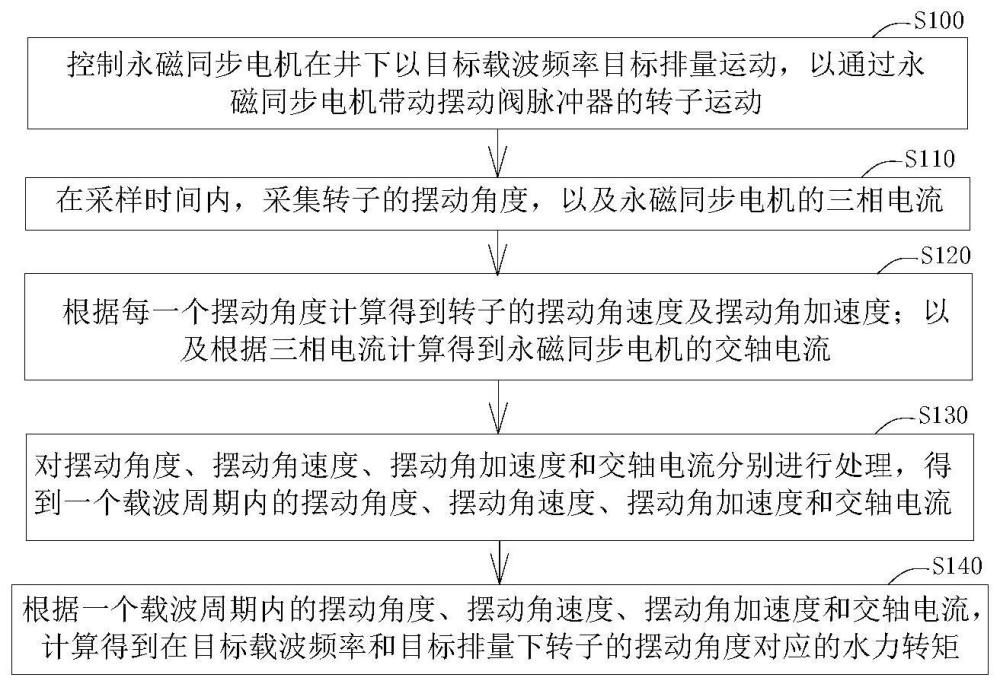
3、控制永磁同步电机在井下以目标载波频率目标排量运动,以通过所述永磁同步电机带动摆动阀脉冲器的转子运动;
4、在采样时间内,采集所述转子的摆动角度,以及所述永磁同步电机的三相电流;所述采样时间等于所述目标载波周期的第一正整数倍,所述采样时间等于采样周期的第二正整数倍;
5、根据每一个所述摆动角度计算得到所述转子的摆动角速度及摆动角加速度;以及根据所述三相电流计算得到所述永磁同步电机的交轴电流;
6、对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行处理,得到一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流;
7、根据一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流,计算得到在所述目标载波频率和所述目标排量下所述转子的摆动角度对应的水力转矩。
8、进一步的,所述控制永磁同步电机在井下以目标载波频率目标排量运动,以通过所述永磁同步电机带动摆动阀脉冲器的转子运动具体为:
9、以位置闭环和最大转矩比电流的控制方式控制所述永磁同步电机在井下以目标载波频率目标排量运动,以通过所述永磁同步电机带动摆动阀脉冲器的转子运动。
10、进一步的,所述根据每一个所述摆动角度计算得到所述转子的摆动角速度及摆动角加速度进一步包括:
11、对于大于1小于第二正整数的任意一个采样点,根据该采样点的摆动角度、该采样点前一采样点的摆动角度、该采样点后一采样点的摆动角度以及所述采样周期,计算得到该采样点的摆动角速度;补齐第一个采样点和第二正整数个采样点的摆动角速度,得到每一个采样点的摆动角速度;
12、对于大于1小于第二正整数的任意一个采样点,根据该采样点的摆动角速度、该采样点前一采样点的摆动角速度、该采样点后一采样点的摆动角速度以及所述采样周期,计算得到该采样点的摆动角加速度;补齐第一个采样点和第二正整数个采样点的摆动角加速度,得到每一个采样点的摆动角加速度。
13、进一步的,所述根据所述三相电流计算得到所述永磁同步电机的交轴电流具体为:
14、对于任意一个采样点,根据该采样点的三相电流,通过坐标变换计算得到该采样点的交轴电流。
15、进一步的,所述对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行处理,得到一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流进一步包括:
16、对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行三次样条插值处理,得到相应的第一数据;
17、对相应的所述第一数据分别进行低通滤波处理,得到相应的第二数据;
18、将相应的所述第二数据分别加权至一个载波周期,得到一个载波周期内的第三数据;
19、分别对相应的所述第三数据进行相位偏移校正,得到一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流。
20、进一步的,所述对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行三次样条插值处理,得到相应的第一数据具体为:
21、以采样周期除以第一正整数与数字1之和的商作为插值的步长,对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行三次样条插值处理,得到相应的第一数据。
22、进一步的,所述对相应的所述第一数据分别进行低通滤波处理,得到相应的第二数据具体为:
23、对于第一个数据点,其经过低通滤波处理之后的第二数据等于该点对应的第一数据;
24、对于除第一个数据点之外的任意一个数据点,该数据点经过低通滤波处理之后的输出值等于第一项目与第二项目之和,其中所述第一项目为滤波系数与该数据点对应的第一数据之积,所述第二项目为数字1与滤波系数的差值与该数据点前一数据点经过低通滤波处理之后的输出值之积。
25、进一步的,所述将相应的所述第二数据分别加权至一个载波周期,得到一个载波周期内的第三数据具体为:
26、以每个载波周期内均包含第二正整数个数据点为依据,将相应的所述第二数据分别表示为第二数据矩阵,其中每个所述第二数据矩阵均为第一正整数行、第二正整数列的矩阵;
27、将每个所述第二数据矩阵的数据分别按列加权,得到一个载波周期内摆动角度的第三数据、摆动角速度的第三数据、摆动角加速度的第三数据和交轴电流的第三数据。
28、进一步的,所述根据一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流,计算得到在所述目标载波频率和所述目标排量下所述转子的摆动角度对应的水力转矩进一步包括:
29、根据一个载波周期内的摆动角度数据计算得到所述摆动角度对应的弹性阻力矩;
30、根据一个载波周期内的摆动角加速度数据计算得到所述摆动角度对应的惯性力矩;
31、根据一个载波周期内的摆动角速度数据计算得到所述摆动角度对应的粘滞摩擦阻力矩;
32、根据一个载波周期内的交轴电流数据计算得到所述摆动角度对应的电磁转矩;
33、根据所述弹性阻力矩、惯性力矩、粘滞摩擦阻力矩和电磁转矩计算得到在所述目标载波频率和所述目标排量下所述转子的摆动角度对应的水力转矩,其中,所述摆动阀脉冲器在井下工作时的水力转矩等于摆动阀转子摆动过程中的惯性力矩、扭轴产生的弹性阻力矩、摆动阀转子摆动过程中的粘滞摩擦阻力矩之和与永磁同步电机输出的电磁转矩的差值。
34、根据本发明的另一方面,提供了一种摆动阀脉冲器的水力转矩的计算装置,包括:
35、控制模块,用于控制永磁同步电机在井下以目标载波频率目标排量运动,以通过所述永磁同步电机带动摆动阀脉冲器的转子运动;
36、数据采集模块,用于在采样时间内,采集所述转子的摆动角度,以及所述永磁同步电机的三相电流;所述采样时间等于所述目标载波周期的第一正整数倍,所述采样时间等于采样周期的第二正整数倍;
37、第一计算模块,用于根据每一个所述摆动角度计算得到所述转子的摆动角速度及摆动角加速度;以及根据所述三相电流计算得到所述永磁同步电机的交轴电流;
38、处理模块,用于对所述摆动角度、所述摆动角速度、所述摆动角加速度和所述交轴电流分别进行处理,得到一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流;
39、第二计算模块,用于根据一个载波周期内的摆动角度、摆动角速度、摆动角加速度和交轴电流,计算得到在所述目标载波频率和所述目标排量下所述转子的摆动角度对应的水力转矩。
40、根据本发明的又一方面,提供了一种计算设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
41、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行上述摆动阀脉冲器的水力转矩的计算方法对应的操作。
42、根据本发明的再一方面,提供了一种计算机存储介质,所述存储介质中存储有至少一可执行指令,所述可执行指令使处理器执行上述摆动阀脉冲器的水力转矩的计算方法对应的操作。
43、本发明的计算方法及装置克服了现有技术中计算水力转矩时由于需要模型简化处理进而影响了计算的准确性的缺陷;本发明动态水力转矩的计算比较准确,对改善泥浆脉冲发生器的结构和控制性能,减少电机功率消耗、提高泥浆脉冲信号的数据传输速率和传输距离具有一定的指导意义。
44、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!