盾构机的控制系统、方法及盾构机与流程
本公开涉及工程机械,尤其是一种盾构机的控制系统、方法及盾构机。
背景技术:
1、盾构机是一种使用盾构法的隧道掘进机。盾构机主要依靠刀盘的切削作用以及多个油缸的向前的压力完成掘进。在盾构机作业的情况下需要考虑导向偏差,即需要纠正盾构机的掘进方向的偏差(也称为“纠偏”)以使得盾构机按照预设的方向掘进。
技术实现思路
1、发明人发现,在盾构机进行纠偏的过程中,存在突然停止掘进的问题。这种问题导致盾构机的作业效率低。
2、发明人进一步分析发现,在盾构机的刀盘的扭矩过大的情况下,为了保护刀盘,盾构机会自动停止掘进。
3、相关技术中的盾构机在纠偏的过程中仅考虑了完成纠偏所需要的油缸的压力。这种方式忽略了在油缸的压力变大的过程中刀盘的扭矩也随之变大的情况,进而导致出现上述问题。
4、为了解决上述问题,本公开实施例提出了如下解决方案。
5、根据本公开实施例的一方面,提供一种盾构机的控制系统,包括:刀盘扭矩预警子系统,被配置为:获取所述盾构机的刀盘的在当前时刻的第一扭矩;根据所述第一扭矩以及所述刀盘的第一预设扭矩,确定所述盾构机的第一目标总推力和所述刀盘的扭矩状态,其中,在所述第一扭矩大于所述第一预设扭矩的情况下所述扭矩状态为异常状态,在所述第一扭矩小于或等于所述第一预设扭矩的情况下所述扭矩状态为正常状态,在所述扭矩状态为异常状态的情况下,所述第一目标推进力小于所述盾构机在当前时刻的上一时刻的总推进力;导向纠偏控制子系统,被配置为:根据预设目标偏差,确定所述盾构机的多个油缸中期望施加大于0的压力的第一组油缸的压力的分布矢量方向;油缸压力求解子系统,被配置为:根据所述刀盘的扭矩状态,确定所述多个油缸的压力的目标合力的大小;根据所述多个油缸的压力的目标合力的大小和所述分布矢量方向确定所述多个油缸的压力,其中,在所述扭矩状态为异常状态的情况下,所述多个油缸的压力的目标合力的大小为所述第一目标总推力。
6、在一些实施例中,还包括推进速度控制子系统,被配置为:获取所述盾构机在当前时刻的第一推进速度;根据所述第一推进速度以及预设目标推进速度,确定所述盾构机的第二目标总推力;其中,在所述扭矩状态为正常状态的情况下,所述多个油缸的压力的目标合力的大小为所述第二目标总推力。
7、在一些实施例中,在所述扭矩状态为异常状态的情况下,所述上一时刻的总推进力与所述第一目标总推力的差不大于所述第一扭矩与所述第一预设扭矩的差所对应的力。
8、在一些实施例中,所述上一时刻的总推进力与所述第一目标总推力的差等于所述第一扭矩与所述上一时刻的扭矩的差所对应的力。
9、在一些实施例中,所述第二目标总推力使得所述当前时刻的下一时刻的第二推进速度小于或等于所述预设目标推进速度,且所述第二推进速度与所述第一推进速度的差不小于所述第一推进速度与所述上一时刻的第三推进速度的差。
10、在一些实施例中,所述第二推进速度与所述第一推进速度的差等于所述第一推进速度与所述第三推进速度的差。
11、在一些实施例中,所述推进速度控制子系统还被配置为:在所述第一扭矩大于或等于第二预设扭矩、且小于或等于所述第一预设扭矩的情况下,确定所述第二目标总推力的施加速率为第一速率,所述第二预设扭矩大于0且小于所述第一预设扭矩;在所述第一扭矩小于所述第二预设扭矩的情况下,确定所述施加速率为第二速率,所述第二速率大于所述第一速率。
12、在一些实施例中,所述导向纠偏控制子系统被配置为:根据所述预设目标偏差,确定所述盾构机的水平方向的第一油缸行程差和所述盾构机的垂直方向的第二油缸行程差;根据所述第一油缸行程差,确定所述盾构机的水平方向的第一油缸压力差;根据所述第二油缸行程差,确定所述盾构机的垂直方向的第二油缸压力差;根据所述第一油缸压力差和所述第二油缸压力差,确定所述分布矢量方向。
13、在一些实施例中,所述导向纠偏控制子系统还被配置为:根据所述分布矢量方向和完成纠偏的期望速度,确定所述多个油缸中需要施加大于0的压力的第二组油缸的压力在所述刀盘上的几何分布形状;所述油缸压力求解子系统被配置为:根据所述多个油缸的压力的目标合力的大小和所述几何分布形状确定所述多个油缸的压力;其中,在第一情况下,所述几何分布形状为三角形,所述分布矢量方向为所述三角形的第一顶点处的第一油缸到与所述第一顶点相对的边的第一中点处的第二油缸,所述第一组油缸的压力沿着所述分布矢量方向依次增大,所述第二组油缸包括所述第一油缸和多对第三油缸,每对第三油缸相对于所述第一顶点和所述第一中点的连线对称分布,每对第三油缸的压力的合力为所述第一组油缸中位于该对第三油缸之间的油缸的压力,所述第一顶点相对的边的长度为所述第一中点对应的一对第三油缸的压力的合力;在第二情况下,所述几何分布形状为梯形,所述分布矢量方向为所述梯形的上底的第二中点处的第四油缸到所述梯形的下底的第三中点处的第五油缸,所述第一组油缸的压力沿着所述分布矢量方向依次增大,所述第二组油缸包括多对第六油缸,每对第六油缸相对于所述第二中点和所述第三中点的连线对称分布,每对第六油缸的压力的合力为所述第一组油缸中位于该对第六油缸之间的油缸的压力,所述上底的长度为所述第二中点对应的一对第六油缸的压力的合力,所述下底的长度为所述第三中点对应的一对第六油缸的压力的合力;其中,所述第一情况的所述期望速度大于所述第二情况的所述期望速度。
14、根据本公开实施例的还一方面,提供一种盾构机的控制方法,包括:获取所述盾构机的刀盘的在当前时刻的第一扭矩;根据所述第一扭矩以及所述刀盘的第一预设扭矩,确定所述盾构机的第一目标总推力和所述刀盘的扭矩状态,其中,在所述第一扭矩大于所述第一预设扭矩的情况下所述扭矩状态为异常状态,在所述第一扭矩小于或等于所述第一预设扭矩的情况下所述扭矩状态为正常状态,在所述扭矩状态为异常状态的情况下,所述第一目标推进力小于所述盾构机在当前时刻的上一时刻的总推进力;根据预设目标偏差,确定所述盾构机的多个油缸中期望施加大于0的压力的第一组油缸的压力的分布矢量方向;根据所述刀盘的扭矩状态,确定所述多个油缸的压力的目标合力的大小;根据所述多个油缸的压力的目标合力的大小和所述分布矢量方向确定所述多个油缸的压力,其中,在所述扭矩状态为异常状态的情况下,所述多个油缸的压力的目标合力的大小为所述第一目标总推力。
15、在一些实施例中,所述方法还包括:获取所述盾构机在当前时刻的第一推进速度;根据所述第一推进速度以及预设目标推进速度,确定所述盾构机的第二目标总推力;其中,在所述扭矩状态为正常状态的情况下,所述多个油缸的压力的目标合力的大小为所述第二目标总推力。
16、在一些实施例中,在所述扭矩状态为异常状态的情况下,所述上一时刻的总推进力与所述第一目标总推力的差不大于所述第一扭矩与所述第一预设扭矩的差所对应的力。
17、在一些实施例中,所述上一时刻的总推进力与所述第一目标总推力的差等于所述第一扭矩与所述上一时刻的扭矩的差所对应的力。
18、在一些实施例中,所述第二目标总推力使得所述当前时刻的下一时刻的第二推进速度小于或等于所述预设目标推进速度,且所述第二推进速度与所述第一推进速度的差不小于所述第一推进速度与所述上一时刻的第三推进速度的差。
19、在一些实施例中,所述第二推进速度与所述第一推进速度的差等于所述第一推进速度与所述第三推进速度的差。
20、在一些实施例中,所述方法还包括:在所述第一扭矩大于或等于第二预设扭矩、且小于或等于所述第一预设扭矩的情况下,确定所述第二目标总推力的施加速率为第一速率,所述第二预设扭矩大于0且小于所述第一预设扭矩;在所述第一扭矩小于所述第二预设扭矩的情况下,确定所述施加速率为第二速率,所述第二速率大于所述第一速率。
21、在一些实施例中,根据所述预设目标偏差,确定所述盾构机的水平方向的第一油缸行程差和所述盾构机的垂直方向的第二油缸行程差;根据所述第一油缸行程差,确定所述盾构机的水平方向的第一油缸压力差;根据所述第二油缸行程差,确定所述盾构机的垂直方向的第二油缸压力差;根据所述第一油缸压力差和所述第二油缸压力差,确定所述分布矢量方向。
22、在一些实施例中,根据所述分布矢量方向和完成纠偏的期望速度,确定所述多个油缸中需要施加大于0的压力的第二组油缸的压力在所述刀盘上的几何分布形状;根据所述多个油缸的压力的目标合力的大小和所述几何分布形状确定所述多个油缸的压力;其中,在第一情况下,所述几何分布形状为三角形,所述分布矢量方向为所述三角形的第一顶点处的第一油缸到与所述第一顶点相对的边的第一中点处的第二油缸,所述第一组油缸的压力沿着所述分布矢量方向依次增大,所述第二组油缸包括所述第一油缸和多对第三油缸,每对第三油缸相对于所述第一顶点和所述第一中点的连线对称分布,每对第三油缸的压力的合力为所述第一组油缸中位于该对第三油缸之间的油缸的压力,所述第一顶点相对的边的长度为所述第一中点对应的一对第三油缸的压力的合力;在第二情况下,所述几何分布形状为梯形,所述分布矢量方向为所述梯形的上底的第二中点处的第四油缸到所述梯形的下底的第三中点处的第五油缸,所述第一组油缸的压力沿着所述分布矢量方向依次增大,所述第二组油缸包括多对第六油缸,每对第六油缸相对于所述第二中点和所述第三中点的连线对称分布,每对第六油缸的压力的合力为所述第一组油缸中位于该对第六油缸之间的油缸的压力,所述上底的长度为所述第二中点对应的一对第六油缸的压力的合力,所述下底的长度为所述第三中点对应的一对第六油缸的压力的合力;其中,所述第一情况的所述期望速度大于所述第二情况的所述期望速度。
23、根据本公开实施例的还一方面,提供一种盾构机的控制系统,包括:用于上述任意一个实施例所述的方法的模块。
24、根据本公开实施例的还一方面,提供一种盾构机的控制系统,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器的指令执行上述任意一个实施例所述的方法。
25、根据本公开实施例的还一方面,提供一种盾构机,包括:上述任意一个实施例所述的系统。
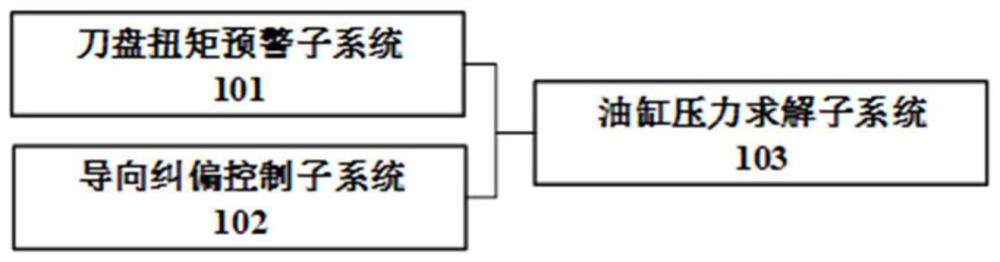
26、本公开实施例中,盾构机控制系统包括刀盘扭矩预警子系统、导向纠偏控制子系统以及油缸压力求解子系统。
27、刀盘扭矩预警子系统获取盾构机的刀盘在当前时刻的第一扭矩并根据第一扭矩和刀盘的第一预设扭矩确定盾构机的第一目标总推力和刀盘的扭矩状态;导向纠偏控制子系统根据预设目标偏差确定盾构机的多个油缸中期望施加大于0的压力的第一组油缸的压力的分布矢量方向;油缸压力求解子系统根据刀盘的扭矩状态,确定盾构机的多个油缸的压力的目标合力的大小,并根据这多个油缸的压力的目标合力的大小和分布矢量方向确定多个油缸的压力。这种方式下,在第一扭矩大于第一预设扭矩的情况(即,异常状态)下,第一目标推进力小于盾构机在当前时刻的上一时刻的总推进力,这多个油缸的压力的目标合力的大小为第一目标总推力。
28、如此,根据当前时刻的刀盘扭矩确定出在扭矩状态为异常状态的情况下的目标总推进力,进而施加该目标总推力以进行纠偏并使得下一时刻的刀盘的扭矩减小,从而既可以完成纠偏,又可以使刀盘的扭矩不至于过大,减少了在刀盘的扭矩过大的情况下盾构机自动停止掘进的情况的发生,提高了盾构机的作业效率。
29、下面通过附图和实施例,对本公开的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!