一种智能掘锚机器人装备
本技术涉及巷道支护,特别是涉及一种智能掘锚机器人装备。
背景技术:
1、煤炭是我国主题能源,国家对煤炭的需求量不断增加。采煤工作面装备自动化智能化不断提高,而掘进工作面由于工艺流程复杂,装备自动化程度低,因此煤矿“采掘失衡”现象越来越严峻。我国煤矿开采主要是以井下开采为主,为保证井下安全作业需要及时对新掘的巷道进行支护,以加强煤巷围岩的稳定性,提高安全性。巷道支护占据巷道成形工作时间超过60%,工作人数也超过70%,主要仍旧依靠人工操作单体设备完成,这种方式安全性差、工人劳动强度大且生产效率低。公开号为cn112012774b的专利文件一种框架式钻锚机器人,其包括第一排钻机构、侧帮护盾机构、前部上网机构、升降工作平台机构、框架式机体、第二排钻机构和锚网运输机构;钻锚机器人在到达钻锚位置时,通过锚网运输机构传输支护锚网到前部上网机构,侧帮护盾机构展开撑网至侧帮煤壁并松网,前部上网机构向左右两侧展开锚网后,向上顶网与顶板贴合,护盾将侧帮网片与侧帮贴合,锚网到达待支护位前时,所有钻机进入待机状态,待锚网到达待支护位后,按照钻锚工艺进行钻锚作业,但是钻锚机器整体的框架式结构,容易受巷道结构的限制,不便于操作。
技术实现思路
1、本实用新型的目的是提供一种智能掘锚机器人装备,以解决上述现有技术存在的问题,提高巷道使用的安全性、掘进速度和效率,也降低了工人的劳动强度,支护效果明显提升,而且整个掘锚机器人的设计能够充分降低巷道结构对其的限制,提高了整个掘锚机器人使用的有效性。
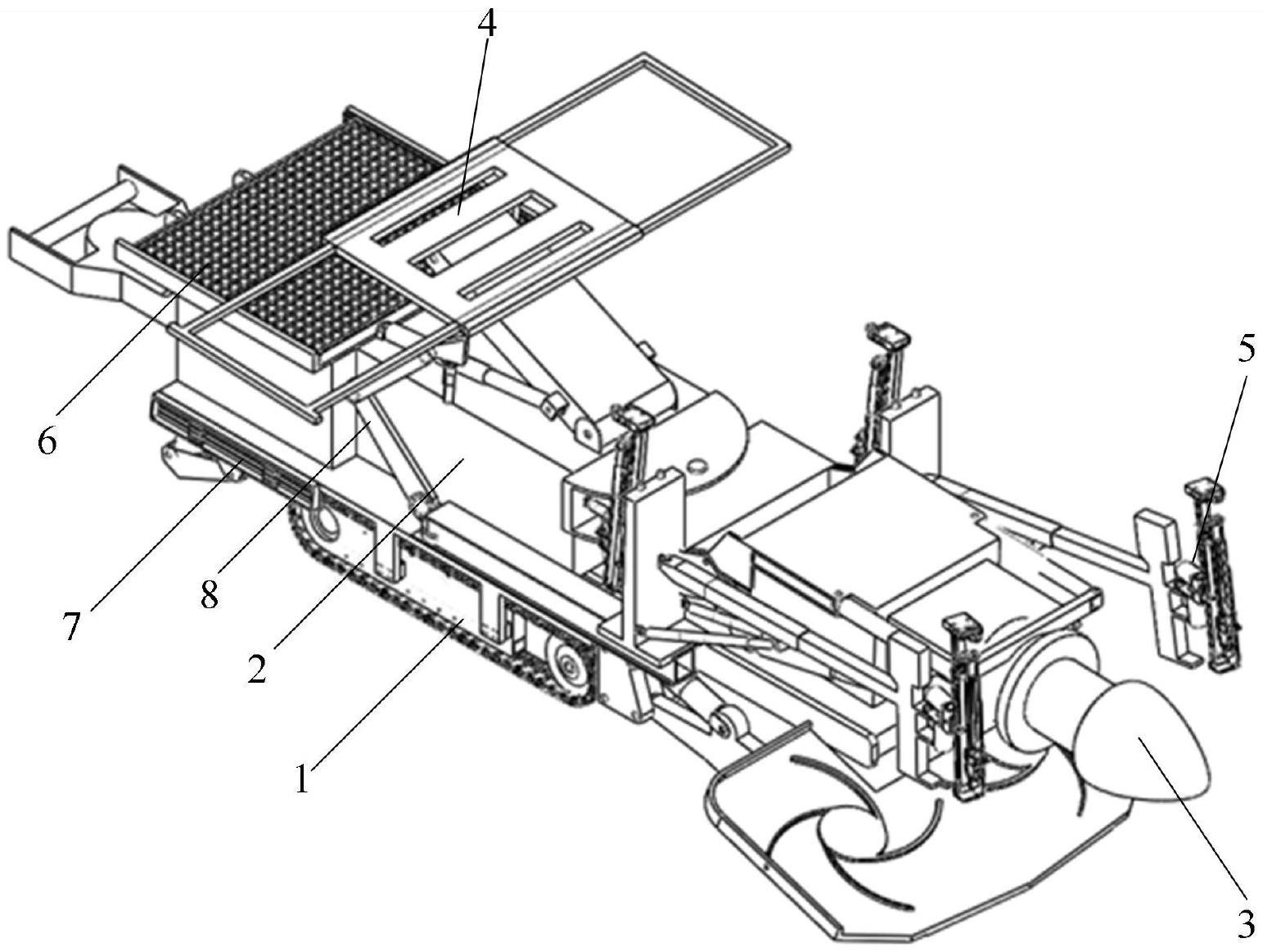
2、为实现上述目的,本实用新型提供了如下方案:本实用新型提供一种智能掘锚机器人装备,包括可移动设置在巷道内的机器人本体,所述机器人本体的前端设有用于掘进巷道的掘进机构,所述机器人本体的顶端铰接设有支护臂,所述支护臂的端部铰接有随其移动并抵接在所述巷道顶壁上的支护支架,所述支护支架靠近所述巷道顶壁的一侧可更换设有锚网,所述支护臂的一侧设有第一多自由度机械臂,所述第一多自由度机械臂的端部设有钻机,所述钻机设有接头及驱动所述接头自转的驱动机构,所述接头可更换连接有随其自转的钻杆和锚杆,所述支护支架上设有供所述钻杆及各所述锚杆穿过的开口,所述开口沿所述巷道宽度方向延伸。
3、优选的,所述掘进机构包括转动连接在所述机器人本体上的第一回转台,所述第一回转台上铰接有截割臂及驱动所述截割臂往复摆动的伸缩杆,所述伸缩杆的一端连接在所述第一回转台上,另一端连接在所述截割臂上,所述截割臂远离所述第一回转台的端部转动连接有截割头,所述截割头抵接在待掘进的位置处。
4、优选的,所述机器人本体的顶端设有第二回转台,所述支护臂铰接在所述第二回转台上,且所述支护臂呈可伸缩式结构。
5、优选的,所述支护支架包括与所述支护臂相铰接的支架主体,所述支架主体沿所述巷道宽度方向上的两侧均设有可伸缩支架,所述可伸缩支架沿所述巷道宽度方向延展或回收。
6、优选的,所述第一多自由度机械臂配套有沿所述机器人本体移动方向延伸的滑轨,所述第一多自由度机械臂未连接所述钻机的一端可移动设置在所述滑轨上。
7、优选的,所述机器人本体上配套有两对所述第一多自由度机械臂及所述滑轨,各对所述第一多自由度机械臂及所述滑轨沿垂直于所述机器人本体移动的方向分布在其两侧。
8、优选的,所述钻机包括抵接在所述巷道内壁上的钻机机架,所述钻机机架靠近所述巷道内壁的位置处设有可打开的导向通道,所述导向通道与钻孔同轴设置,所述导向通道远离所述巷道内壁的一侧设有推动部,所述推动部眼所述导向通道轴线方向可移动安装在所述钻机机架上,所述接头及所述驱动机构安装在所述推动部上。
9、优选的,所述机器人本体上设有锚网仓及成对的锚杆仓,所述锚网仓位于所述机器人本体末端,并存储有用于锚固作业所需的锚网,所述锚杆仓位于所述机器人本体宽度方向上的两侧,并存储有用于锚固作业所需的锚杆。
10、优选的,所述锚杆仓与所述滑轨之间设有抓取机构,所述抓取机构包括转动连接在所述机器人本体上的第二多自由度机械臂,所述第二多自由度机械臂设有用于抓取所述锚网及所述锚杆的抓手。
11、优选的,所述所述机器人本体的底部设有履带式行走机构。
12、本实用新型相对于现有技术取得了以下技术效果:
13、第一,掘进机构工作完成巷道掘进工作,同时由于支护臂铰接在机器人本体的顶端,且支护支架铰接在支护臂的顶端,通过支护臂及支护支架的旋转,支护支架用于对巷道顶壁进行临时支护,即在锚网和锚杆进行锚固之前对巷道顶壁进行支撑,并将放置在支护支架上的锚网抵接巷道的顶壁上,第一多自由度机械臂驱动钻机对应在支护支架的下方,将接头连接钻杆后,穿过开口及锚网对巷道的顶壁进行钻孔,之后通过移动第一多自由度机械臂,在接头处将钻杆更换为锚杆,再通过第一多自由度机械臂将锚杆锚固在锚网及钻孔处,完成对巷道顶壁的锚固,进而整个机器人能够同时完成巷道的掘进及支护工作,提高了作业效率,降低工人劳动强度,改善巷道安全状况,支护效果明显提升。进一步的,通过在机器人本体上设置可移动的支护臂及第一多自由度机械臂,在行进的过程中,支护臂或第一多自由度机械臂可以适应性的展开相应的程度,无需类似于现有技术中将机器人整体设置为框架式结构,本实用新型中的机器人本体更适应具有局限性的应用环境中,提高了整个装置的适用性。
14、第二,掘进机构包括转动连接在机器人本体上的第一回转台,第一回转台上铰接有截割臂及驱动截割臂往复摆动的伸缩杆,伸缩杆的一端连接在第一回转台上,另一端连接在截割臂上,截割臂远离第一回转台的端部转动连接有截割头,截割头抵接在待掘进的位置处,通过截割臂的运动截割头到达目标位置,通过截割头的旋转完成巷道的掘进作业任务,第一回转台以能够将截割臂沿水平方向适应性的转动相应的角度,伸缩杆驱动截割臂相应的沿高度方向上摆动,以保证掘进作业的有效性。
15、第三,机器人本体的顶端设有第二回转台,支护臂铰接在第二回转台上,且支护臂呈可伸缩式结构,首先通过第二回转台以能够将支护臂转动至相应的方向,以适配转弯结构的巷道,或者适配巷道的侧壁支护,将锚网通过第二回转台的转动及支护臂和支护支架的转动后,贴附在巷道的侧壁上,以能够方便的后续通过锚杆对锚网及巷道侧壁进行锚固,再者通过支护臂的可伸缩结构,以能够使得支护臂及支护支架适配巷道的宽度,保证支护支架带锚网有效贴附在巷道的内壁上。
16、第四,支护支架包括与支护臂相铰接的支架主体,支架主体沿巷道宽度方向上的两侧均设有可伸缩支架,可伸缩支架沿巷道宽度方向延展或回收,通过设置可伸缩支架使得整个支护支架能够适应性的配合巷道宽度,将与其结构相匹配的整块锚网贴附在同等宽度的巷道顶壁上,保证了锚网锚固面积,提高了对巷道支护的有效性。
技术特征:
1.一种智能掘锚机器人装备,其特征在于,包括可移动设置在巷道内的机器人本体,所述机器人本体的前端设有用于掘进巷道的掘进机构,所述机器人本体的顶端铰接设有支护臂,所述支护臂的端部铰接有随其移动并抵接在所述巷道顶壁上的支护支架,所述支护支架靠近所述巷道顶壁的一侧可更换设有锚网,所述支护臂的一侧设有第一多自由度机械臂,所述第一多自由度机械臂的端部设有钻机,所述钻机设有接头及驱动所述接头自转的驱动机构,所述接头可更换连接有随其自转的钻杆和锚杆,所述支护支架上设有供所述钻杆及各所述锚杆穿过的开口,所述开口沿所述巷道宽度方向延伸。
2.根据权利要求1所述的智能掘锚机器人装备,其特征在于,所述掘进机构包括转动连接在所述机器人本体上的第一回转台,所述第一回转台上铰接有截割臂及驱动所述截割臂往复摆动的伸缩杆,所述伸缩杆的一端连接在所述第一回转台上,另一端连接在所述截割臂上,所述截割臂远离所述第一回转台的端部转动连接有截割头,所述截割头抵接在待掘进的位置处。
3.根据权利要求1或2所述的智能掘锚机器人装备,其特征在于,所述机器人本体的顶端设有第二回转台,所述支护臂铰接在所述第二回转台上,且所述支护臂呈可伸缩式结构。
4.根据权利要求3所述的智能掘锚机器人装备,其特征在于,所述支护支架包括与所述支护臂相铰接的支架主体,所述支架主体沿所述巷道宽度方向上的两侧均设有可伸缩支架,所述可伸缩支架沿所述巷道宽度方向延展或回收。
5.根据权利要求4所述的智能掘锚机器人装备,其特征在于,所述第一多自由度机械臂配套有沿所述机器人本体移动方向延伸的滑轨,所述第一多自由度机械臂未连接所述钻机的一端可移动设置在所述滑轨上。
6.根据权利要求5所述的智能掘锚机器人装备,其特征在于,所述机器人本体上配套有两对所述第一多自由度机械臂及所述滑轨,各对所述第一多自由度机械臂及所述滑轨沿垂直于所述机器人本体移动的方向分布在其两侧。
7.根据权利要求6所述的智能掘锚机器人装备,其特征在于,所述钻机包括抵接在所述巷道内壁上的钻机机架,所述钻机机架靠近所述巷道内壁的位置处设有可打开的导向通道,所述导向通道与钻孔同轴设置,所述导向通道远离所述巷道内壁的一侧设有推动部,所述推动部眼所述导向通道轴线方向可移动安装在所述钻机机架上,所述接头及所述驱动机构安装在所述推动部上。
8.根据权利要求7所述的智能掘锚机器人装备,其特征在于,所述机器人本体上设有锚网仓及成对的锚杆仓,所述锚网仓位于所述机器人本体末端,并存储有用于锚固作业所需的锚网,所述锚杆仓位于所述机器人本体宽度方向上的两侧,并存储有用于锚固作业所需的锚杆。
9.根据权利要求8所述的智能掘锚机器人装备,其特征在于,所述锚杆仓与所述滑轨之间设有抓取机构,所述抓取机构包括转动连接在所述机器人本体上的第二多自由度机械臂,所述第二多自由度机械臂设有用于抓取所述锚网及所述锚杆的抓手。
10.根据权利要求9所述的智能掘锚机器人装备,其特征在于,所述机器人本体的底部设有履带式行走机构。
技术总结
本技术公开一种智能掘锚机器人装备,包括可移动设置在巷道内的机器人本体,机器人本体的前端设有用于掘进巷道的掘进机构,机器人本体的顶端铰接设有支护臂,支护臂的端部铰接有随其移动并抵接在巷道顶壁上的支护支架,支护支架靠近巷道顶壁的一侧可更换设有锚网,支护臂的一侧设有第一多自由度机械臂,第一多自由度机械臂的端部设有钻机,钻机设有接头及驱动接头自转的驱动机构,接头可更换连接有随其自转的钻杆和锚杆,提高巷道使用的安全性、掘进速度和效率,也降低了工人的劳动强度,支护效果明显提升。
技术研发人员:张旭辉,雷孟宇,余恒翰,田琛辉,黄梦瑶,迟云凯,汤杜炜
受保护的技术使用者:西安科技大学
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!