一种湿喷台车全自动作业控制系统的制作方法
本技术涉及湿喷台车领域,具体涉及一种湿喷台车全自动作业控制系统。
背景技术:
1、混凝土湿喷台车是一种用于隧道建设,地下工程建设的机械,它将混凝土以很高的速度喷射到施工面,从而在喷射表面形成混凝土支撑层;为防止喷射的混凝土回弹掉落,在混凝土中按比例混合了速凝剂,该化学物质具有强碱性且有挥发性和强烈气味,对人身体有很大的危害,在湿喷作业时会弥漫在施工区域。
2、传统的施工是由操作手近距离遥控臂架,让臂架末端的喷嘴对准施工面实施湿喷,根据人眼看到的平面平整度调节喷射厚度,作业对操作手有专业的要求,往往一次施工需要连续长时间作业,施工的质量对操作手的专业程度,专注度都有一定要求。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种湿喷台车全自动作业控制系统,以克服上述现有技术中的不足。
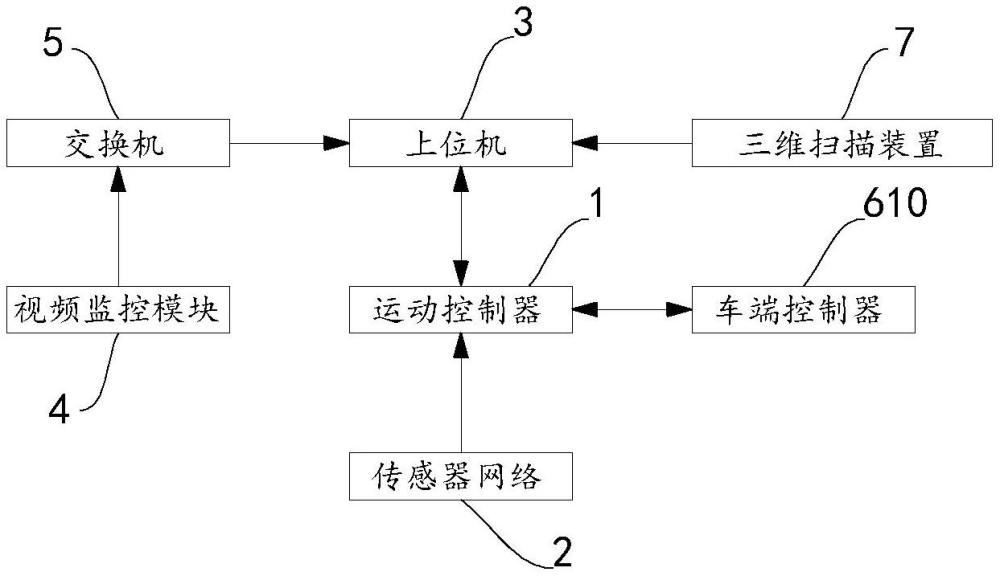
2、本实用新型解决上述技术问题的技术方案如下:一种湿喷台车全自动作业控制系统,包括:运动控制器,运动控制器与湿喷台车的车端控制器电连接,以接收湿喷速率信号;湿喷台车的臂架上设置用以获取臂架姿态信息的传感器网络,运动控制器与传感器网络电连接;运动控制器与用以生成作业轨迹和各作业点湿喷厚度信息的上位机电连接;上位机与用以对施工区域进行三维数据及全景信息采集的三维扫描装置电连接。
3、在上述技术方案的基础上,本实用新型还可以做如下改进。
4、进一步,三维扫描装置包括:三维激光扫描仪和广角摄像头。
5、进一步,三维扫描装置固定在安装杆上,三维扫描装置外具有可自动开合的保护罩,三维激光扫描仪和广角摄像头均处在所述保护罩内。
6、进一步,湿喷台车的车身上具有识别标志。
7、进一步,上位机与视频监控模块电连接。
8、进一步,视频监控模块为车端网络云台相机。
9、进一步,视频监控模块通过交换机与上位机电连接。
10、进一步,运动控制器内含减振控制系统。
11、本实用新型的有益效果是:
12、启动三维扫描装置,三维扫描装置对施工区域进行三维数据及全景信息采集,并将所获取的数据发送给上位机,然后在上位机中构建融合彩色全景图的施工区域三维图;
13、在上位机以三维扫描装置中心建立世界坐标系,以及根据湿喷台车车身与三维扫描装置的相对位置,建立湿喷台车车身坐标系;
14、操作手在上位机中的三维图中圈选湿喷区域;
15、上位机根据所圈选的湿喷区域和该区域内激光扫描数据,生成作业轨迹和各作业点湿喷厚度信息;
16、上位机将作业轨迹和各作业点湿喷厚度信息发送给运动控制器,运动控制器根据作业轨迹,规划各时刻湿喷台车的臂架姿态,并对应控制湿喷台车运动机构动作;
17、运动控制器根据各作业点湿喷厚度信息,生成喷嘴在各作业点的驻留时间和湿喷速率;
18、按照作业轨迹遍历完一次湿喷作业后,湿喷台车停止湿喷,等待上位机再次启动;
19、在按照作业轨迹湿喷作业过程中上位机实时获取运动控制器发送的姿态信息,湿喷速率等信息,并制作可视化三维作业面及湿喷厚度信息;
20、再次启动三维扫描装置,三维扫描装置对施工区域再进行三维数据及全景信息采集,以获取施工区域湿喷后融合彩色全景图的施工区域三维图;
21、上位机根据施工区域湿喷后的三维图,重新在原施工区域找平,若需要进行补喷,则生成新的作业轨迹和新的各作业点湿喷厚度信息;
22、运动控制器根据新的各作业点湿喷厚度信息,生成喷嘴在各作业点的驻留时间和湿喷速率;
23、上位机向运动控制器下发新的作业轨迹和新的各作业点湿喷厚度信息,并再次启动自动湿喷作业;
24、通过上述技术方案本实用新型可以构建融合彩色全景图的施工区域三维图,操作手只需在上位机上圈选需要湿喷区域,上位机根据圈选湿喷区域,生成作业轨迹和各作业点湿喷厚度信息,并下发到运动控制器,然后运动控制器再控制湿喷台车自动进行湿喷作业,具有自动补喷功能,在湿喷作业完成后,三维扫描装置再次开启对施工区域扫描建立融合彩色全景图的施工区域三维图,自动找平,对需补喷区域再次生成作业轨迹和各作业点湿喷厚度信息,并进行补喷,减少人员参与,降低对人体的危害,同时提高施工效率和质量,只需要操作手进行少量操作即可,降低对操作手的技术要求;
25、通过视频监控模块可远程监控湿喷作业,以便上位机对运动控制器下达指令,让湿喷台车进行自动化操作,或远程干预湿喷动作;
26、运动控制器内含减振控制系统,通过湿喷台车的转台、臂架,以及安装在臂架上的传感器网络构建臂架运动学模型,确定臂架运行时实时姿态,检测臂架振动幅度,运动控制器主动发出信号驱动臂架液压运动系统对臂架振动实施反向力,使臂架运动时更加平稳,达到减振效果。
技术特征:
1.一种湿喷台车全自动作业控制系统,其特征在于,包括:运动控制器(1),所述运动控制器(1)与湿喷台车(6)的车端控制器(610)电连接,以接收湿喷速率信号;所述湿喷台车(6)的臂架(620)上设置用以获取臂架(620)姿态信息的传感器网络(2),所述运动控制器(1)与所述传感器网络(2)电连接;所述运动控制器(1)与用以生成作业轨迹和各作业点湿喷厚度信息的上位机(3)电连接;所述上位机(3)与用以对施工区域进行三维数据及全景信息采集的三维扫描装置(7)电连接,所述上位机(3)与视频监控模块(4)电连接。
2.根据权利要求1所述的一种湿喷台车全自动作业控制系统,其特征在于:所述三维扫描装置(7)包括:三维激光扫描仪和广角摄像头。
3.根据权利要求2所述的一种湿喷台车全自动作业控制系统,其特征在于:所述三维扫描装置(7)固定在安装杆(8)上,所述三维扫描装置(7)外具有可自动开合的保护罩,所述三维激光扫描仪和广角摄像头均处在所述保护罩内。
4.根据权利要求1所述的一种湿喷台车全自动作业控制系统,其特征在于:所述湿喷台车(6)的车身上具有识别标志(660)。
5.根据权利要求1所述的一种湿喷台车全自动作业控制系统,其特征在于:所述视频监控模块(4)为车端网络云台相机。
6.根据权利要求1或5所述的一种湿喷台车全自动作业控制系统,其特征在于:所述视频监控模块(4)通过交换机(5)与上位机(3)电连接。
7.根据权利要求1所述的一种湿喷台车全自动作业控制系统,其特征在于:所述运动控制器(1)内含减振控制系统。
技术总结
本技术涉及一种湿喷台车全自动作业控制系统,包括:运动控制器,运动控制器与湿喷台车的车端控制器电连接,以接收湿喷速率信号;湿喷台车的臂架上设置用以获取臂架姿态信息的传感器网络,运动控制器与传感器网络电连接;运动控制器与用以生成作业轨迹和各作业点湿喷厚度信息的上位机电连接;上位机与用以对施工区域进行三维数据及全景信息采集的三维扫描装置电连接。有益效果为:减少人员参与,降低对人体的危害,同时提高施工效率和质量,只需要操作手进行少量操作即可,降低对操作手的技术要求。
技术研发人员:张新林,赵璞,严寅辉,李绍金
受保护的技术使用者:武汉岚谱智能科技有限公司
技术研发日:20230807
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!