一种异形管幕机顶进姿态调整方法及装置与流程
本发明涉及管幕机工程施工,特别涉及一种异形管幕机姿态调整方法及装置。
背景技术:
1、随着全球经济的快速发展和人口数量的增长,城市化进程不断加快,城市地下空间的利用、规划与建设的要求也在不断提高,对地下空间开发过程中为了减小对交通疏解、地下水流失、地层变形和周边建筑物的影响。施工单位普遍采用非开挖工程技术进行施工。
2、非开挖工程技术是只在地面挖取工作井与接收井,然后在工作井中通过管幕法把要埋设的管道顶入规划好得城市地底位置,且顶管的直接为dn400—450mm,一个工作井内的顶推的管道可在地下穿行2000米以上,并且还能曲线穿行,以绕开一些地下管线或障碍物,实现对城市地底管道的布设,该技术所开挖的面积小,占用的施工场地小,且施工过程中不会对地面上的物体造成损坏,省时、高效、安全,施工的综合成本低,现已广泛用于城市地下给排水管道、天然气管道、石油管道以及通讯电缆管道等的布设中。
3、管幕法施工过程中由于地层土质一般不均一、密度大小各不相同等原因的影响,以及管幕施工是在地下进行,工作人员对于施工的具体状况无法实时查看,只能通过增设接收井观察管幕机顶进路线,若管幕机在接收井之间发生偏移,则通过辅助液压顶杆对管幕机端头进行强制矫正,但该纠偏方式的精度低,且工作人员无法实时查看管幕机顶进的方向,进而由于地质结构的影响,且管幕机若是再次发生偏移,则需要再次花费较大的人力和物力进行纠偏,导致管幕机顶进轴线难以控制,容易出现管道脱口。
技术实现思路
1、本发明的主要目的在于提供了一种异形管幕机顶进姿态调整方法及装置,解决了上述背景技术中管幕机的顶进矫正不能实时进行检测以及矫正,导致异形管幕机顶级路线与设计路线之间出现极大偏差的问题。
2、为实现上述目的,本发明采取的技术方案为:
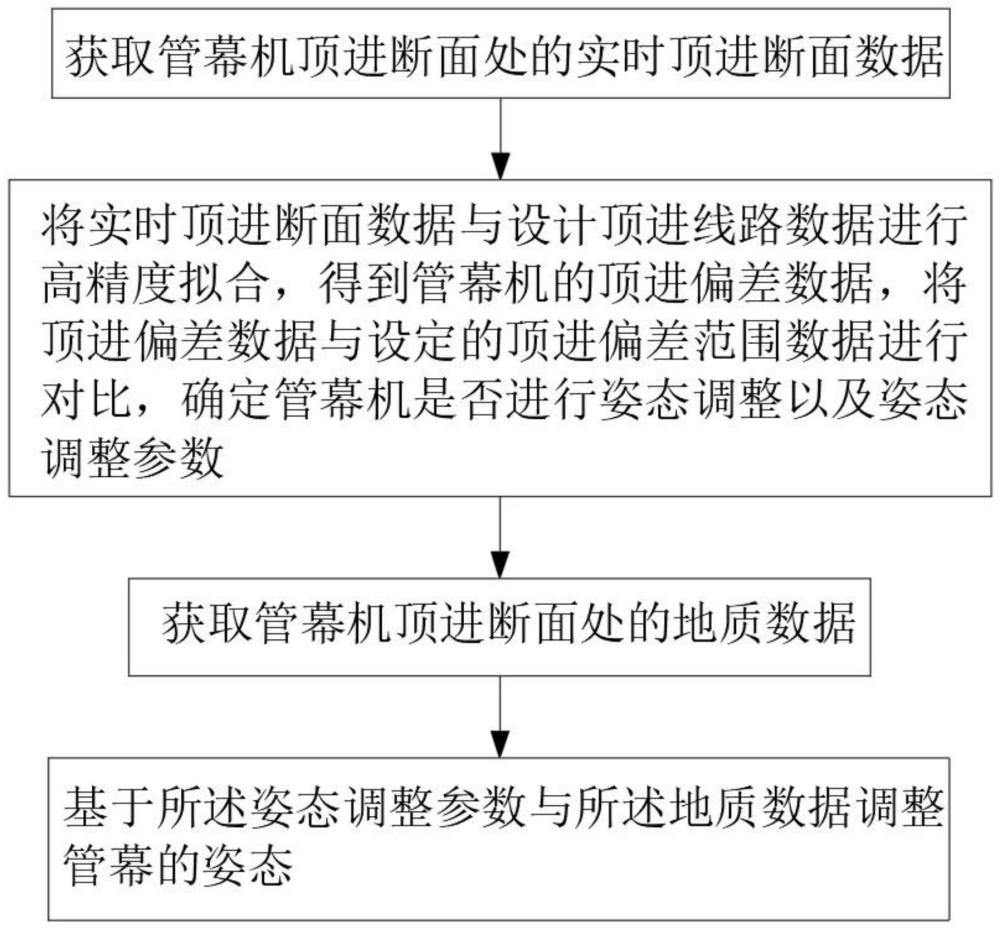
3、一种异形管幕机顶进姿态调整方法,包括:
4、获取异形管幕机顶进断面处的实时顶进断面数据;
5、将实时顶进断面数据与设计顶进线路数据进行拟合,得到异形管幕机的顶进偏差数据,将顶进偏差数据与设定的顶进偏差数据进行对比,确定异形管幕机是否进行姿态调整以及姿态调整参数;
6、获取异形管幕机顶进断面处的地质数据;
7、基于所述姿态调整参数与所述地质数据调整异形管幕机的顶进姿态。
8、进一步的,所述获取异形管幕机顶进断面处的实时顶进断面数据,至少包括:
9、获取异形管幕机顶进断面处的实时图像数据,对所述图像数据进行储存;
10、获取异形管幕机顶进断面上各个点位相对施工初始点的坐标数据,对所述坐标数据进行储存;
11、基于所述图像数据和所述坐标数据构建所述异形管幕机的顶进路线三维模型;
12、基于所述顶进路线三维模型、所述图像数据和所述坐标数据构建施工路线数据库,即所述实时顶进断面数据。
13、进一步的,将所述实时顶进断面数据与设计顶进线路数据进行拟合,至少包括:
14、将设计路线的三维模型中设计路线的初始点与顶进路线三维模型的初始点重合;
15、在设计路线的三维模型中对应的断面处选取一个点构建平面坐标系;
16、对比施工路线数据库中的顶进路线三维模中各个点在坐标系上的坐标数据与设计路线的三维模型中对应的断面处对应点在坐标系上的坐标数据,并计算出所述顶进偏差数据。
17、进一步的,所述顶进偏差数据包括横向偏差值和纵向偏差值;
18、所述横向偏差值为对应两个点横坐标的数值差;
19、所述纵向偏差值为对应两个点纵坐标的数值差。
20、进一步的,所述顶进偏差数据与设定的顶进偏差范围数据进行对比,确定异形管幕机是否进行姿态调整以及姿态调整参数包括:
21、初步确定横向的姿态调整以及计算横向的姿态调整参数:
22、初步确定纵向的姿态调整以及计算纵向的姿态调整参数:
23、然后获取通过异形管幕机顶进断面处的地质数据;并基于所述纵向的姿态调整参数、横向的姿态调整参数以及所述地质数据调整异形管幕机的姿态。
24、进一步的,所述地质数据包括顶进断面处的温湿度、地层压力、地下水压;
25、基于纵向的姿态调整参数、横向的姿态调整参数以及获取的温湿度、地层压力、地下水压输入所述计算机控制终端中的分析单元内进行分析,确定是否按照所述纵向的姿态调整参数和所述横向的姿态调整参数更改异形管幕机的顶进路线;
26、若更改,则通过调整设备按照所述纵向的姿态调整参数和所述横向的姿态调整参数调整异形管幕机的顶进路线:若不更改,则继续异形管幕机原始顶进路线并持续获取顶进断面处的实时顶进断面数据。
27、本发明还公开了一种异形管幕机顶进姿态调整装置,包括:
28、数据获取模块,用于获取异形管幕机顶进断面处的实时顶进断面数据;
29、数据拟合模块,用于将所述实时顶进断面数据与设计顶进线路数据进行拟合,得到异形管幕机的顶进偏差数据;
30、数据比对模块,用于对于所述顶进偏差数据与设定的顶进偏差数据进行比对;
31、控制模块,用于根据数据比对单元的比对结果,控制管幕机的调整管幕顶进姿态。
32、进一步的,所述数据获取模块包括图像数据获取单元、坐标数据获取单元、构建模型单元和数据储存单元,所述图像数据获取单元和所述坐标数据获取单元均安装于所述异形管幕机的顶进断面上;
33、所述图像数据获取单元获取异形管幕机顶进断面处的实时图像数据;
34、所述坐标数据获取单元获取异形管幕机顶进断面上各个点位相对施工初始点的坐标数据;
35、将获取的所述图像数据和所述坐标数据通过所述构建模型单元进行拟合,构建所述异形管幕机的顶进路线三维模型;
36、所述数据储存单元用于储存所述图像数据、所述坐标数据、所述顶进偏差数据、所述设定的顶进偏差数据、所述设计顶进线路数据以及所述异形管幕机的顶进路线三维模型。
37、进一步的,所述图像获取单元包括视觉摄像头;所述坐标数据获取单元包括雷达。
38、进一步的,所述数据拟合模块包括数据拟合单元、坐标系构建单元、坐标对比单元以及顶进偏差计算单元;
39、所述数据拟合单元用于将设计路线的三维模型中设计路线的初始点与所述顶进路线三维模型的初始点重合;
40、在设计路线的三维模型中对应的断面处用所述坐标系构建单元构建平面坐标系,得到构建的所述异形管幕机的顶进路线三维模型中顶进断面内各个点的在所述平面坐标系上的坐标数据、所述设计路线的三维模型中对应的断面处对应点在所述平面坐标系上的坐标数据;利用坐标对比单元将所述异形管幕机的顶进路线三维模型中顶进断面内各个点的坐标数据与所述设计路线的三维模型中对应的断面处对应点的坐标数据进行对比,通过所述顶进偏差计算单元计算得到所述顶进偏差数据。
41、与现有技术相比,本发明具有如下有益效果:
42、1、本发明公开的姿态调整方法是通过视觉摄像头、毫米波雷达以及激光雷达获取异形管幕机顶进断面处的实时数据,然后构建三维模型,通过构建的三维构型与设计路线的三维模型进行对比,使得工作人员能够准确了解到异形管幕机顶进断面处的偏差数据,进而对异形管幕机进行调节,该姿态调整方法调整的精度高,对异形管幕机矫正的成本低,降低施工成本,使得异形管幕机能够沿着设计的路线偏差范围之内进行顶进,进而避免管道脱口的情况出现;同时,该姿态调整方法中,工作人员能够通过获取异形管幕机顶进断面的实时数据了解异形管幕机的顶进装置以及顶进断面的实时情况,对于突发的事故进行调整,提高施工的安全性。
43、2、本发明中基于顶进路线三维模型、图像数据和所述坐标数据构建施工路线数据库,该施工路线数据库能够便于工作人员清楚异形管幕机所顶进的整理距离,以及异形管幕机的实时顶进断面处的位置以及图像数据,也能够使得工作人员观察到管幕机头部的工作状态以及后期对整个隧道进行结构分析和评估,也使得工作人员通过该数据库能够清楚隧道内哪些位置容易出现事故,需要进行防护,便于后期隧道的施工以及维护,同时,工作人员在异形管幕机顶进过程中不再属于“盲操”,能够实时查看异形管幕机顶进的路线以及顶进方向地质情况。
- 还没有人留言评论。精彩留言会获得点赞!