掘进机换步的控制方法、装置、设备及存储介质与流程
本技术属于掘进机施工领域,具体涉及一种掘进机换步的控制方法、装置、设备及存储介质。
背景技术:
1、竖井掘进机包括设置在地面上的钢绞线提升组件、撑靴组件、推进组件、测量组件和控制系统。竖井掘进机的施工包括开挖、换步、出渣、支护等多个环节。
2、针对大型竖井挖掘机,竖井成井的垂直度和高效安全施工是重要控制指标。目前,掘进机的换步过程是以人工操作为主,操作员通过控制撑靴组件中多个撑靴油缸的伸出,向井壁靠近,当每个撑靴油缸的撑紧压力增大到预设阈值后,停止伸出撑靴油缸,观察测量组件反馈的偏差数据,根据偏差数据,反复调节撑靴油缸,直至掘进机的位姿偏差控制在一定范围内,完成换步过程。
3、在上述换步过程中,手动控制撑靴组件撑紧井壁的方法以及控制效果受人工操作的影响较大,且换步的周期较长,导致掘进机的施工效率较低。
技术实现思路
1、本技术实施例涉及一种掘进机换步的控制方法、装置、设备及存储介质,用以解决现有技术中掘进机的施工效率较低的缺陷。
2、第一方面,本技术实施例提供一种掘进机换步的控制方法,所述掘进机包括盾体和钢绞线提升组件,所述钢绞线提升组件与所述盾体连接,所述盾体包括推进油缸和撑靴组件,所述方法包括:
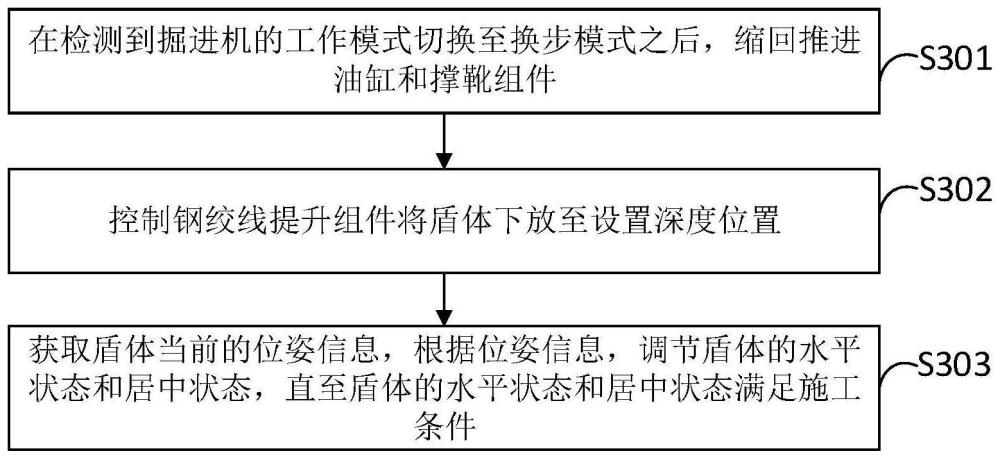
3、在检测到所述掘进机的工作模式切换至换步模式之后,缩回所述推进油缸和所述撑靴组件;
4、控制所述钢绞线提升组件将所述盾体下放至设置深度位置;
5、获取所述盾体当前的位姿信息,根据所述位姿信息,调节所述盾体的水平状态和居中状态,直至所述盾体的水平状态和居中状态满足施工条件。
6、在一种可能的实施方式中,所述位姿信息包括所述盾体的当前半径、倾斜信息和当前中心位置,根据所述位姿信息,调节所述盾体的水平状态和居中状态,直至所述盾体的水平状态和居中状态满足施工条件,包括:
7、根据所述当前半径和所述倾斜信息,通过所述钢绞线提升组件调节所述盾体的水平状态,直至所述水平状态满足施工条件;
8、根据所述当前半径和所述当前中心位置,通过所述撑靴组件调节所述盾体的居中状态,直至所述居中状态满足施工条件。
9、在一种可能的实施方式中,所述倾斜信息包括水平倾斜角和竖直倾斜角,根据所述当前半径和所述倾斜信息,通过所述钢绞线提升组件调节所述盾体的水平状态,直至所述水平状态满足施工条件,包括:
10、根据所述当前半径和所述水平倾斜角,确定所述钢绞线提升组件的水平调整量;
11、根据所述当前半径和所述竖直倾斜角,确定所述钢绞线提升组件的竖直调整量;
12、根据所述水平调整量和所述竖直调整量,调节所述盾体的水平状态,直至所述水平状态满足施工条件。
13、在一种可能的实施方式中,所述撑靴组件包括多个撑靴油缸,根据所述当前中心位置,通过所述撑靴组件调节所述盾体的居中状态,直至所述居中状态满足施工条件,包括:
14、获取满足施工条件的设计中心位置;
15、根据所述当前中心位置和所述设计中心位置,确定所述盾体的水平偏差和竖直偏差;
16、根据所述水平偏差、所述竖直偏差和所述当前半径,确定所述多个撑靴油缸的伸长量;
17、根据所述多个撑靴油缸的伸长量,调节所述盾体的居中状态,直至所述居中状态满足施工条件。
18、在一种可能的实施方式中,根据所述多个撑靴油缸的伸长量,调节所述盾体的居中状态,直至所述居中状态满足施工条件,包括:
19、根据所述多个撑靴油缸的伸长量,调节所述盾体的居中状态,并获取每个撑靴油缸的撑紧压力和所述盾体调节后的更新中心位置;
20、判断所述每个撑靴油缸的撑紧压力是否满足预设阈值,且所述更新中心位置是否在以所述设计中心位置为圆心、预设距离为半径的区域内;
21、若是,确定所述居中状态满足施工条件;
22、若否,根据所述更新中心位置和所述设计中心位置,确定所述盾体的更新水平偏差和更新竖直偏差,根据所述更新水平偏差、所述更新竖直偏差和所述当前半径,确定所述多个撑靴油缸的更新伸长量,根据所述多个撑靴油缸的更新伸长量,调节所述盾体的居中状态,直至所述居中状态满足施工条件。
23、在一种可能的实施方式中,针对任意一个撑靴油缸,根据所述水平偏差、所述竖直偏差和所述当前半径,确定所述撑靴油缸的伸长量,包括:
24、获取所述撑靴油缸与水平正方向的夹角和开挖半径;
25、根据所述水平偏差、所述竖直偏差、所述当前半径、所述开挖半径、以及所述撑靴油缸与水平正方向的夹角,通过如下公式计算所述撑靴油缸的伸长量:
26、
27、其中,l为伸长量,r为开挖半径,△x为水平偏差,△y为竖直偏差,r为当前半径,θ为撑靴油缸与水平正方向的夹角。
28、在一种可能的实施方式中,控制所述钢绞线提升组件将所述盾体下放至设置深度位置,包括:
29、获取测量组件测量的深度里程信息;
30、根据所述深度里程信息,确定设置深度位置;
31、控制所述钢绞线提升组件将所述盾体下放至所述设置深度位置。
32、第二方面,本技术实施例提供一种掘进机换步的控制装置,所述掘进机包括盾体和钢绞线提升组件,所述钢绞线提升组件与所述盾体连接,所述盾体包括推进油缸和撑靴组件,所述装置包括:
33、缩回模块,用于在检测到所述掘进机的工作模式切换至换步模式之后,缩回所述推进油缸和所述撑靴组件;
34、控制模块,用于控制所述钢绞线提升组件将所述盾体下放至设置深度位置;
35、调节模块,用于获取所述盾体当前的位姿信息,根据所述位姿信息,调节所述盾体的水平状态和居中状态,直至所述盾体的水平状态和居中状态满足施工条件。
36、在一种可能的实施方式中,所述位姿信息包括所述盾体的当前半径、倾斜信息和当前中心位置,调节模块具体用于:
37、根据所述当前半径和所述倾斜信息,通过所述钢绞线提升组件调节所述盾体的水平状态,直至所述水平状态满足施工条件;
38、根据所述当前半径和所述当前中心位置,通过所述撑靴组件调节所述盾体的居中状态,直至所述居中状态满足施工条件。
39、在一种可能的实施方式中,所述倾斜信息包括水平倾斜角和竖直倾斜角,调节模块具体用于:
40、根据所述当前半径和所述水平倾斜角,确定所述钢绞线提升组件的水平调整量;
41、根据所述当前半径和所述竖直倾斜角,确定所述钢绞线提升组件的竖直调整量;
42、根据所述水平调整量和所述竖直调整量,调节所述盾体的水平状态,直至所述水平状态满足施工条件。
43、在一种可能的实施方式中,所述撑靴组件包括多个撑靴油缸,调节模块具体用于:
44、获取满足施工条件的设计中心位置;
45、根据所述当前中心位置和所述设计中心位置,确定所述盾体的水平偏差和竖直偏差;
46、根据所述水平偏差、所述竖直偏差和所述当前半径,确定所述多个撑靴油缸的伸长量;
47、根据所述多个撑靴油缸的伸长量,调节所述盾体的居中状态,直至所述居中状态满足施工条件。
48、在一种可能的实施方式中,调节模块具体用于:
49、根据所述多个撑靴油缸的伸长量,调节所述盾体的居中状态,并获取每个撑靴油缸的撑紧压力和所述盾体调节后的更新中心位置;
50、判断所述每个撑靴油缸的撑紧压力是否满足预设阈值,且所述更新中心位置是否在以所述设计中心位置为圆心、预设距离为半径的区域内;
51、若是,确定所述居中状态满足施工条件;
52、若否,根据所述更新中心位置和所述设计中心位置,确定所述盾体的更新水平偏差和更新竖直偏差,根据所述更新水平偏差、所述更新竖直偏差和所述当前半径,确定所述多个撑靴油缸的更新伸长量,根据所述多个撑靴油缸的更新伸长量,调节所述盾体的居中状态,直至所述居中状态满足施工条件。
53、在一种可能的实施方式中,针对任意一个撑靴油缸,调节模块具体用于:
54、获取所述撑靴油缸与水平正方向的夹角和开挖半径;
55、根据所述水平偏差、所述竖直偏差、所述当前半径、所述开挖半径、以及所述撑靴油缸与水平正方向的夹角,通过如下公式计算所述撑靴油缸的伸长量:
56、
57、其中,l为伸长量,r为开挖半径,△x为水平偏差,△y为竖直偏差,r为当前半径,θ为撑靴油缸与水平正方向的夹角。
58、在一种可能的实施方式中,控制模块具体用于:
59、获取测量组件测量的深度里程信息;
60、根据所述深度里程信息,确定设置深度位置;
61、控制所述钢绞线提升组件将所述盾体下放至所述设置深度位置。
62、第三方面,本技术实施例提供一种电子设备,包括:存储器和处理器;
63、所述存储器存储计算机程序指令;
64、所述处理器执行所述存储器存储的计算机程序指令,以实现如第一方面任一项所述的方法。
65、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序指令,当所述计算机程序指令被处理器执行时用于实现第一方面中任一项所述的方法。
66、第五方面,本技术实施例提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的方法。
67、本技术实施例提供一种掘进机换步的控制方法、装置、设备及存储介质,该方法中,通过在检测到掘进机的工作模式切换至换步模式之后,缩回推进油缸和撑靴组件,控制钢绞线提升组件将盾体下放至设置深度位置,获取盾体当前的位姿信息,根据位姿信息,调节盾体的水平状态和居中状态,直至盾体的水平状态和居中状态满足施工条件。这样,在掘进机的换步过程中,无需人工手动调节盾体,通过位姿信息可以自动调节盾体的水平状态和居中状态,直至满足施工条件,提高了盾体姿态控制的精确度,有效保障了竖井成井的垂直度,提高了掘进机的施工效率。
- 还没有人留言评论。精彩留言会获得点赞!