交叉洞室施工控制方法、装置、设备及存储介质与流程
本发明涉及tbm施工,尤其涉及到一种交叉洞室施工控制方法、装置、设备及存储介质。
背景技术:
1、tbm(全断面隧道掘进机)是一种在地下工程中广泛应用的设备,其工作原理是通过旋转的刀盘切割岩土,并将切下的岩土通过排土系统排出,同时推进盾构机向前掘进,在tbm掘进施工过程中,通常通过控制推进油缸的压力和分区组合操作来实现对掘进方向的调整,以使tbm的实际掘进路线更符合施工计划的标准掘进路线。
2、在实际应用中,tbm的掘进方向通常根据标准掘进路线中当前位置指向下一位置的方向来确定,在确定好掘进方向后,控制对应的推进油缸组合施加压力来驱动刀盘偏转,以此实现对掘进方向的调节。但在一些场景下,刀盘偏转的方向不仅仅受推进油缸的调节,还受到实际掘进施工场景的干扰,使得刀盘偏转的方向控制难度增大,影响实际掘进效果。
3、例如,在进行隧道交叉洞室的施工时,通常需要先对较短的隧道支路进行初次始发掘进,在完成初次始发后退回至交叉位置之前,再对较长的隧道主路进行二次始发掘进,如图1所示,在二次始发掘进过程中,由于隧道主路与隧道支路的掘进角度不同,需要在隧道支路掘进的墙体上以一定角度执行二次始发掘进施工,在该施工过程中需要控制适宜的掘进速度(型号不同或磨损程度不同的tbm之间具有差异),否则会因为刀盘受力位置不均衡,导致刀盘相对于驱动连接部的轴向呈θ的转角,使得刀盘向受力更大的方向偏转并进行后续掘进施工,而通常刀盘的姿态监测是通过测量驱动并连接刀盘的驱动连接部的整体偏转角度来实现的,其无法监测到由于刀盘受力不均衡引起的相对于驱动连接部偏转导致刀盘方向偏移的现象。
4、因此,如何实现对隧道交叉洞室施工的高精度与高及时性的监测以及如何控制掘进速度以对因隧道交叉洞室施工导致刀盘偏转使得掘进路线产生的方向偏移进行修正,是一个亟需解决的技术问题。
技术实现思路
1、本发明的主要目的在于提供一种交叉洞室施工控制方法、装置、设备及存储介质,旨在解决目前隧道交叉洞室施工使得刀盘受力不均衡引起相对于驱动连接部偏转导致刀盘方向偏转,由于掘进速度控制不当导致刀盘长时间偏轴运转引起的损伤tbm设备以及掘进路线偏移等技术问题。
2、为实现上述目的,本发明提供一种交叉洞室施工控制方法,包括:
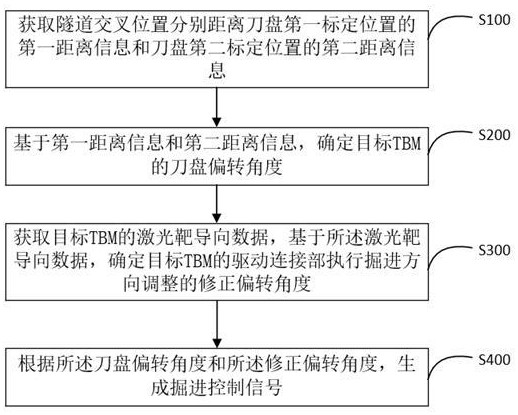
3、获取隧道交叉位置分别距离刀盘第一标定位置的第一距离信息和刀盘第二标定位置的第二距离信息;
4、基于第一距离信息和第二距离信息,确定目标tbm的刀盘偏转角度;
5、获取目标tbm的激光靶导向数据,基于所述激光靶导向数据,确定目标tbm的驱动连接部执行掘进方向调整的修正偏转角度;
6、根据所述刀盘偏转角度和所述修正偏转角度,生成掘进控制信号。
7、可选的,获取隧道交叉位置分别距离刀盘第一标定位置的第一距离信息和刀盘第二标定位置的第二距离信息步骤,具体包括:
8、驱动设置于隧道交叉位置的偏载掘进检测装置执行偏载掘进检测动作;其中,所述偏载掘进检测动作包括向目标tbm发射呈预设角度的第一偏载检测光束和第二偏载检测光束;
9、根据发射所述第一偏载检测光束与所述第二偏载检测光束的发射时间和接收所述第一偏载检测光束与所述第二偏载检测光束的回波的接收时间,计算获得隧道交叉位置分别距离刀盘第一标定位置的第一距离信息和刀盘第二标定位置的第二距离信息。
10、可选的,基于第一距离信息和第二距离信息,确定目标tbm的刀盘偏转角度步骤,具体包括:
11、根据所述第一距离信息、所述第二距离信息和所述预设角度,利用三角函数关系,确定所述目标tbm的刀盘与所述第一偏载检测光束或所述第二偏载检测光束在当前检测时刻构成的光束实际投射角度;
12、将当前检测时刻构成的光束实际投射角度与上一检测时刻构成的光束标准投射角度的差值作为目标tbm的刀盘偏转角度。
13、可选的,获取目标tbm的激光靶导向数据,基于所述激光靶导向数据,确定目标tbm的驱动连接部执行掘进方向调整的修正偏转角度步骤,具体包括:
14、获取目标tbm的双激光靶导向数据;其中,所述双激光靶导向数据包括第一全站仪测量第一激光靶获得的第一导向关联信息和第二全站仪测量第二激光靶获得的第二导向关联信息;
15、根据所述第一导向关联信息和所述第二导向关联信息,生成所述目标tbm的实际位置信息和实际偏转角度;
16、基于所述实际位置信息,调用所述目标tbm执行当前掘进施工任务的标准掘进转向数据集,匹配所述目标tbm当前的标准偏转角度;
17、根据所述标准偏转角度和所述实际偏转角度,生成目标tbm的驱动连接部执行掘进方向调整的修正偏转角度。
18、可选的,所述第一全站仪与所述第二全站仪分别设置于施工隧道内靠近已掘进隧道方向的第一位置和第二位置,所述第一位置与所述第二位置对称隧道轴心设置,所述第一激光靶与所述第二激光靶设置于目标tbm正对已掘进隧道方向的面板;
19、其中,所述第一全站仪与所述第二全站仪被配置为分别向所述第一激光靶与所述第二激光靶发射平行的测距激光束;
20、其中,获取目标tbm的双激光靶导向数据步骤,具体包括:
21、获取第一全站仪与第二全站仪在每个测距时刻分别向第一激光靶和第二激光靶发射测距激光束的第一发射时间戳与第二发射时间戳和接收反射测距激光束的第一接收时间戳和第二接收时间戳;
22、根据所述第一发射时间戳与所述第一接收时间戳,生成所述目标tbm的第一导向关联信息;根据所述第二发射时间戳与所述第二接收时间戳,生成所述目标tbm的第二导向关联信息;
23、其中,所述第一导向关联信息被配置为包括所述第一全站仪与所述第一激光靶之间的第一距离波形,所述第二导向关联信息被配置为包括所述第二全站仪与所述第二激光靶之间的第二距离波形。
24、可选的,根据所述第一导向关联信息和所述第二导向关联信息,生成所述目标tbm的实际位置信息和实际偏转角度步骤,具体包括:
25、对所述第一距离波形和所述第二距离波形中具有相同测量时间的每个波形采样点进行测量距离作差运算,将作差运算后每个测量时间对应的测量距离差值作为第一参考距离;
26、获取所述第一激光靶与所述第二激光靶发射的测距激光束之间的激光束距离值,基于所述激光束距离值与所述第一参考距离,采用三角函数计算出所述目标tbm的实际偏转角度;
27、对所述第一距离波形和所述第二距离波形分别进行预设测量时间范围内的平均值滤波,并将滤波后具有相同测量时间的每个波形采样点进行测量距离相加运算,将相加运算后每个测量时间对应的测量距离之和的二分之一作为第二参考距离;
28、获取所述第一全站仪与所述第二全站仪的基础设置位置和所述目标tbm的轴向长度,并基于所述基础设置位置、所述轴向长度和所述第二参考距离,确定所述目标tbm的实际位置信息。
29、可选的,根据所述刀盘偏转角度和所述修正偏转角度,生成掘进控制信号步骤,具体包括:
30、根据所述刀盘偏转角度和所述修正偏转角度,生成用于控制目标tbm掘进速度的掘进控制信号;其中:
31、所述掘进控制信号被配置为实时调节目标tbm的掘进速度,以使所述刀盘偏转角度和所述修正偏转角度的差值的在预设范围内。
32、此外,为了实现上述目的,本发明还提供了一种交叉洞室施工控制装置,包括:
33、第一获取模块,用于获取隧道交叉位置分别距离刀盘第一标定位置的第一距离信息和刀盘第二标定位置的第二距离信息;
34、确定模块,用于基于第一距离信息和第二距离信息,确定目标tbm的刀盘偏转角度;
35、第二获取模块,用于获取目标tbm的激光靶导向数据,基于所述激光靶导向数据,确定目标tbm的驱动连接部执行掘进方向调整的修正偏转角度;
36、生成模块,用于根据所述刀盘偏转角度和所述修正偏转角度,生成掘进控制信号。
37、此外,为了实现上述目的,本发明还提供了一种交叉洞室施工控制设备,所述交叉洞室施工控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的交叉洞室施工控制程序,所述交叉洞室施工控制程序被所述处理器执行时实现如上所述的交叉洞室施工控制方法的步骤。
38、此外,为了实现上述目的,本发明还提供了一种存储介质,所述存储介质上存储有交叉洞室施工控制程序,所述交叉洞室施工控制程序被处理器执行时实现上述的交叉洞室施工控制方法的步骤。
39、本发明的有益效果在于:提出了一种交叉洞室施工控制方法、装置、设备及存储介质,通过检测在执行隧道交叉洞室施工的二次始发过程中当前的刀盘偏转角度与通过检测控制连接刀盘的驱动连接部以调整tbm掘进方向的修正偏转角度,来对tbm的掘进速度进行实时调节,以使刀盘在受到不均衡受力时引起的相对于驱动连接部的方向偏转保持在允许范围内,减少刀盘偏轴运行带来的损耗,也降低了由于掘进路线偏移引起的修正幅度以及反复修正次数,平衡刀盘损耗与施工效率,提高施工质量。
- 还没有人留言评论。精彩留言会获得点赞!