离心风机、出风控制方法、装置及吸油烟机与流程
1.本发明涉及吸油烟机技术领域,特别涉及一种离心风机、出风控制方法、装置及吸油烟机。
背景技术:
2.离心风机中蜗舌的主要作用的对蜗壳出口处的气流进行分流,在风量大出口气流速度较高时,要采用浅蜗舌,减少气流对蜗舌的冲击,降低噪声,在管道阻力较大时,要采用深蜗舌,减少蜗舌处的回流,提升吸油烟机的抗背压能力,且气流在蜗壳轴向方向分布不均匀,现有技术中没有比较合适的蜗舌结构能在大多数工况下都能起到减少噪声、增大静压的效果,需要优化。
技术实现要素:
3.鉴于此,本发明提出一种离心风机,实现了能根据不同工况分段调节蜗舌的深浅,在大多数工况在都能起到减少噪声、增大静压的效果,然而,如何根据工作参数对应的不同工况来调节蜗舌的深浅是一个亟待解决的问题。
4.为实现上述目的,本发明提出的离心风机包括:
5.离心风机的壳体结构,所述离心风机的壳体结构包括蜗壳、蜗舌以及推拉机构,所述蜗壳限定出一供离心风轮安装的安装腔、以及自所述安装腔的一侧延伸出的出风通道,所述蜗舌设于所述出风通道和所述安装腔的交界处,且向所述出风通道的中心延伸且突出设置,所述蜗舌至少部分在其突伸方向上可发生形变,以使得所述蜗舌在对应的形变处沿其突伸方向上伸缩,所述推拉机构用以对应推拉所述蜗舌可形变处形变;
6.离心风轮,转动安装于所述安装腔内;
7.监测装置,用以监测所述离心风机的工作参数;以及,
8.控制装置,电连接所述监测装置,用以根据获得所述工作参数控制所述推拉机构动作。
9.在一实施例中,所述工作参数包括风机出风口流速参数、风机出风口静压参数、电机功率参数以及风轮转速参数中的至少一种。
10.在一实施例中,所述监测装置包括设于所述离心风机的出风口处的流速测量装置,用以测量所述离心风机的出风口处的流速。
11.在一实施例中,所述流速测量装置包括第一风速管,所述第一风速管的总压孔用以相对所述离心风机的出风口的气流设置。
12.在一实施例中,所述离心风机的出风口设有第一出风管,所述第一出风管内设有整流格栅,所述整流格栅用以将所述第一出风管的内腔分隔成多个平行设置的管流道;
13.所述第一风速管处于所述整流格栅背向所述离心风机出风口的一侧,且对应其中之一所述管流道设置。
14.在一实施例中,所述整流格栅包括相互交错设置的多个格栅板。
15.在一实施例中,所述蜗舌具有形成在其突伸方向上的一端的分流面,所述分流面呈圆弧曲面设置。
16.在一实施例中,以所述蜗舌沿所述出风风道的周向延伸的方向为其长度方向,沿其长度方向上,所述蜗舌的分流面自其中部位置向两侧的曲率半径逐渐增大。
17.在一实施例中,所述蜗舌包括处于中间位置的中部蜗舌段以及分设于所述中部蜗舌段两边侧的边部蜗舌段,其中,
18.所述中部蜗舌段的曲率半径为r1,且5mm≤r1≤11mm;和/或,
19.所述边部蜗舌段的曲率半径为r2,且3mm≤r2≤9mm。
20.在一实施例中,所述推拉机构包括直线驱动结构,所述直线驱动结构安装于所述蜗壳,所述直线驱动结构的驱动端驱动连接所述蜗舌中可形变的部分。
21.在一实施例中,沿所述蜗舌的突伸方向上,所述蜗舌具有与所述分流面相对的安装面,所述蜗舌具有安载腔,且在所述安装面侧设有开口;
22.所述直线驱动结构的驱动端自所述开口伸入至所述安载腔内。
23.在一实施例中,所述蜗舌的材质为柔性材质。
24.本发明还提出一种吸油烟机,所述吸油烟机包括离心风机,所述离心风机包括离心风机的壳体结构及离心风轮,所述离心风轮转动安装于所述安装腔内,所述离心风机的壳体结构包括:
25.蜗壳,限定出一供离心风轮安装的安装腔、以及自所述安装腔的一侧延伸出的出风通道;
26.蜗舌,设于所述出风通道和所述安装腔的交界处,且向所述出风通道的中心延伸且突出设置,所述蜗舌至少部分在其突伸方向上可发生形变,以使得所述蜗舌在对应的形变处沿其突伸方向上伸缩;以及,
27.推拉机构,用以对应推拉所述蜗舌可形变处形变。
28.本发明还提出一种离心风机出风控制方法,所述离心风机出风控制方法包括如下步骤:
29.获取所述离心风机的实际工作参数;
30.根据获得的实际工作参数、以及第一映射关系,获得实际调节参数,其中,所述第一映射关系为工作参数与调节参数之间对应的关联关系;
31.根据获得的实际调节参数,控制所述推拉机构活动。
32.在一实施例中,在所述蜗舌的突伸方向上,所述推拉机构推拉所述蜗舌,以使得所述蜗舌具有中部位置外突的第一调整位置、中部位置内凹的第二调整位置以及处于所述第一调整位置和所述第二调整位置之间的过渡调整位置,所述第一映射关系为:
33.当所述工作参数满足第一预设条件时,控制所述推拉机构活动,以使得所述蜗舌处于所述第一调整位置;
34.当所述工作参数满足第二预设条件时,控制所述推拉机构活动,以使得所述蜗舌处于所述第二调整位置;
35.当所述工作参数满足第三预设条件时,控制所述推拉机构活动,以使得所述蜗舌处于所述过渡调整位置。
36.本发明还提出一种离心风机出风控制装置,包括:存储器、处理器及存储在所述存
储器上并可在所述处理器上运行的离心风机出风控制程序,所述离心风机出风控制程序配置为实现离心风机出风控制方法的步骤,所述离心风机出风控制方法包括如下步骤:
37.获取所述离心风机的实际工作参数;
38.根据获得的实际工作参数、以及第一映射关系,获得实际调节参数,其中,所述第一映射关系为工作参数与调节参数之间对应的关联关系;
39.根据获得的实际调节参数,控制所述推拉机构活动。
40.本发明的技术方案中,所述离心风机包括离心风机的壳体结构、离心风轮、监测装置以及控制装置,所述蜗舌向所述出风通道的中心延伸且突出设置,所述蜗舌至少部分在其突伸方向上可发生形变,所述推拉机构用以对应推拉所述蜗舌可形变处形变,所述控制装置通过所述监测装置监测工作参数,以控制所述推拉机构动作,通过所述推拉机构的推拉调整作用,可以调节所述蜗舌不同位置处的深浅,以适应不同工况下气流在所述蜗壳的轴向上分布不均匀的情况,起到减少噪声、增大静压的效果,同时,根据工作参数自动调节所述蜗舌长度方向的深浅分布,便于实现自动化调整,提高用户体验。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
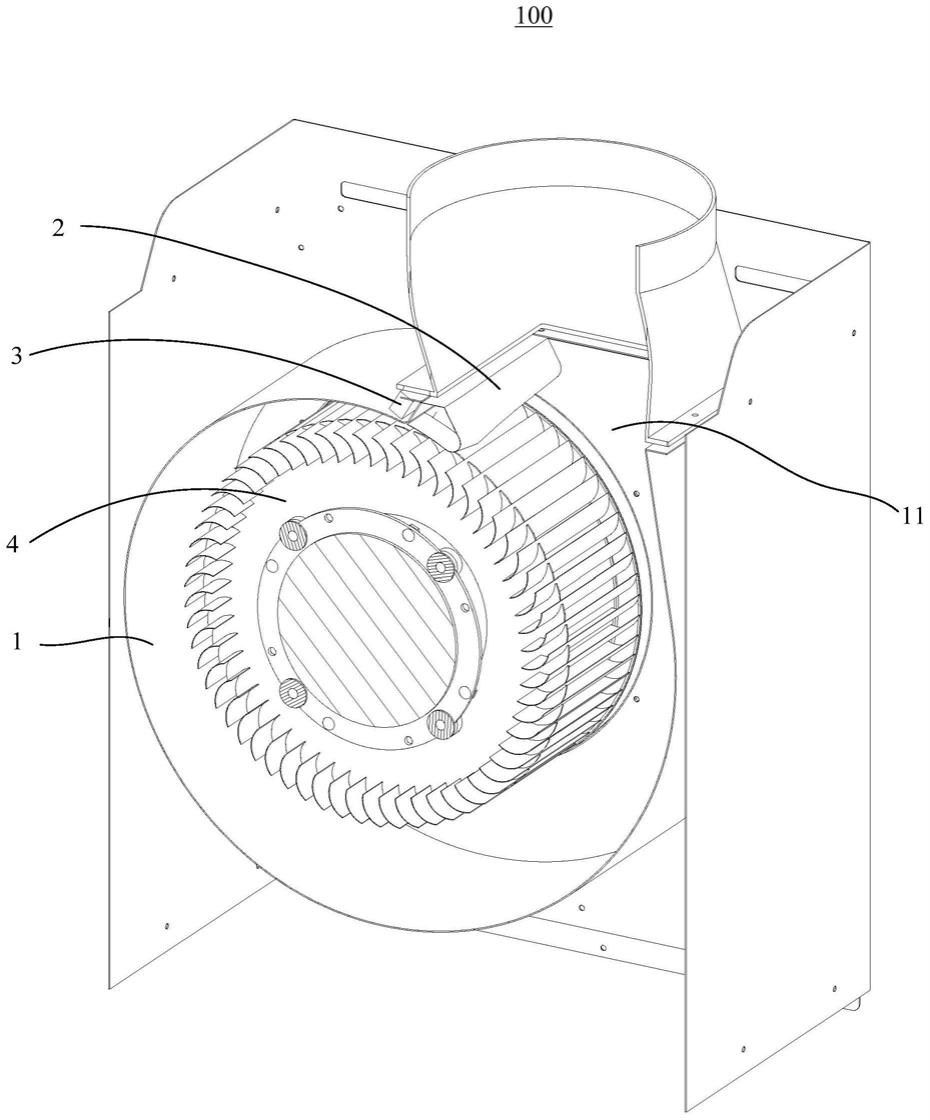
42.图1为本发明离心风机的一实施例的立体结构示意图;
43.图2为图1中蜗舌与推拉机构配合(一角度)的立体结构示意图;
44.图3为图1中蜗舌与推拉机构分解的立体结构示意图;
45.图4为图1中蜗舌与推拉机构配合(另一角度)的立体结构示意图;
46.图5为图1中离心风机的控制结构示意图;
47.图6为包含图1中离心风机的吸油烟机的一实施例的立体结构示意图;
48.图7为图6中吸油烟机的局部剖视结构示意图;
49.图8为图6中吸油烟机(第一角度且设有第一出风管)的局部剖视立体结构示意图;
50.图9为图6中吸油烟机(第一角度且设有第二出风管)的局部剖视立体结构示意图;
51.图10为图6中吸油烟机(第二角度)的局部剖视立体结构示意图;
52.图11为图6中吸油烟机(第三角度)的局部剖视立体结构示意图;
53.图12为图11中局部a的放大示意图。
54.图13为本发明实施例方案涉及的硬件运行环境的服务器结构示意图;
55.图14为本发明离心风机出风控制方法一实施例的流程示意图。
56.附图标号说明:
57.标号名称标号名称100离心风机2012第一静压孔1蜗壳202整流格栅11出风通道203电流传感器2蜗舌204反射光电测量装置
21安载腔2041激光发射器3推拉机构2042激光接收器31直线驱动结构2043反射片4离心风轮205第一出风管1000吸油烟机206第二出风管200监测装置207第二风速管201第一风速管208第二静压孔2011总压孔300控制装置
58.本发明目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
59.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
61.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,若全文中出现的“和/或”或者“及/或”,其含义包括三个并列的方案,以“a和/或b”为例,包括a方案、或b方案、或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
62.离心风机中蜗舌的主要作用的对蜗壳出口处的气流进行分流,在风量大出口气流速度较高时,要采用浅蜗舌,减少气流对蜗舌的冲击,降低噪声,在管道阻力较大时,要采用深蜗舌,减少蜗舌处的回流,提升吸油烟机的抗背压能力,且气流在蜗壳轴向方向分布不均匀,现有技术中没有比较合适的蜗舌结构能在大多数工况下都能起到减少噪声、增大静压的效果,需要优化。
63.鉴于此,本发明提出一种吸油烟机,所述吸油烟机包括离心风机,所述离心风机包括离心风机的壳结构,只要是包含有所述离心风机的壳结构的离心风机都属于本发明的保护范围,同样地,只要是包含有本发明的离心风机的吸油烟机都属于本发明的保护范围,其中,图1至图5为本发明提供的离心风机的实施例的示意图,图6至图14为本发明提供的吸油烟机的实施例的示意图。
64.请参阅图1至图4,本发明提出的离心风机100包括离心风机的壳体结构、离心风轮4、监测装置200以及控制装置300,所述离心风机的壳体结构包括蜗壳1、蜗舌2以及推拉机构3,所述蜗壳1限定出一供离心风轮4安装的安装腔、以及自所述安装腔的一侧延伸出的出
风通道11,所述蜗舌2设于所述出风通道11和所述安装腔的交界处,且向所述出风通道11的中心延伸且突出设置,所述蜗舌2至少部分在其突伸方向上可发生形变,以使得所述蜗舌2在对应的形变处沿其突伸方向上伸缩,所述推拉机构3用以对应推拉所述蜗舌2可形变处形变,所述离心风轮4转动安装于所述安装腔内,所述监测装置200用以监测所述离心风机4的工作参数,所述控制装置300电连接所述监测装置200,用以根据获得所述工作参数控制所述推拉机构3动作。
65.本发明的技术方案中,所述离心风机100包括离心风机的壳体结构、离心风轮4、监测装置200以及控制装置300,所述蜗舌2向所述出风通道11的中心延伸且突出设置,所述蜗舌2至少部分在其突伸方向上可发生形变,所述推拉机构3用以对应推拉所述蜗2舌可形变处形变,所述控制装置300通过所述监测装置200监测工作参数,以控制所述推拉机构3动作,通过所述推拉机构3的推拉调整作用,可以调节所述蜗舌2不同位置处的深浅,以适应不同工况下气流在所述蜗壳1的轴向上分布不均匀的情况,起到减少噪声、增大静压的效果,同时,根据工作参数自动调节所述蜗舌2长度方向的深浅分布,便于实现自动化调整,提高用户体验。
66.另外,所述蜗舌2向所述出风通道11的中心延伸且突出设置,所述蜗舌2至少部分在其突伸方向上可发生形变,以使得所述蜗舌2在对应的形变处沿其突伸方向上伸缩,所述推拉机构3用以对应推拉所述蜗舌2可形变处形变,通过所述推拉机构3的调整作用,可以调节所述蜗舌2不同位置处的深浅,以适应不同工况下气流在所述蜗壳1的轴向上分布不均匀的情况,起到减少噪声、增大静压的效果。
67.一实施例中,所述蜗舌2具有形成在其突伸方向上的一端的分流面,所述分流面呈圆弧曲面设置,将所述蜗舌的分流面设置为曲面便于在所述蜗壳1内形成分流,减少气流阻力。
68.所述蜗壳1在轴向平面内的气流速度分布都是不均匀的,会出现靠近中盘处流速高,两侧处流速小的状态,一实施例中,以所述蜗舌2沿所述出风风道11的周向延伸的方向为其长度方向,沿其长度方向上,所述蜗舌2的分流面自其中部位置向两侧的曲率半径逐渐增大,此时对应处于中间的蜗舌2为尖蜗舌,对应的两侧的蜗舌2为平蜗舌,更利于气体的分流,减少所述蜗舌2处的回流。
69.一实施例中,请参阅图4,所述蜗舌2包括处于中间位置的中部蜗舌段以及分设于所述中部蜗舌段两边侧的边部蜗舌段,所述中部蜗舌段的曲率半径为r1,且5mm≤r1≤11mm,所述边部蜗舌段的曲率半径为r2,且3mm≤r2≤9mm,如此设置,更利于气体的分流,减少所述蜗舌2处的回流。
70.所述推拉机构3根据不同的工况对所述蜗舌2的深度进行调整,如,风机出口处阻力过大,所述蜗舌2处的气流流速较小,且由于排烟的需要,在保持风量的前提下要提升静压,以克服排烟阻力,此时,采用中间外突的蜗舌,有利于气流的分流,及减少所述蜗舌2处的回流,并提升静压;风机出口处阻力适中,考虑风量和静压的综合需求,采用中间相对较平的蜗舌;风机出口处阻力过小,所述蜗舌2处的气流流速较大,高速气流会对所述蜗舌2冲击会产生高频的气动噪声,因此采用中间相对内凹的蜗舌,能够减少高速气流对所述蜗舌2的冲击,降低噪声。
71.一实施例中,请参阅图2,在所述蜗舌2的突伸方向上,所述推拉机构3推拉所述蜗
舌2,以使得所述蜗舌2具有中部位置外突的第一调整位置、中部位置内凹的第二调整位置以及处于所述第一调整位置和所述第二调整位置之间的过渡调整位置,所述蜗舌2在所述第一调整位置时,所述第一调整位置对应为采用中间外突的蜗舌,有利于气流的分流,及减少蜗舌2处的回流,并提升静压,所述第二调整位置对应为能够减少高速气流对所述蜗舌2的冲击,降低噪声,所述推拉机构3调整所述蜗舌2在所述第一调整位置、过渡调整位置以及所述第二调整位置之间切换,以适应不同工况下的调整需求,起到减少噪声、增大静压的效果,需要说明的是,所述第一调整位置、第二调整位置以及所述过渡位置不是一个绝对的位置,是一个调整范围。
72.所述推拉机构3用以对应推拉所述蜗舌2可形变处形变,本发明不限制所述推拉机构3的具体驱动方式,一实施例中,请参阅图3,所述推拉机构3包括直线驱动结构31,所述直线驱动结构31安装于所述蜗壳1,所述直线驱动结构31的驱动端驱动连接所述蜗舌2中可形变的部分,通过所述直线驱动结构31驱动所述蜗舌2可形变的部分形变,结构相对简单。
73.本发明不限制所述直线驱动结构31的具体结构形式,如,可以是气缸、油缸或者电动推杆中的一种,一实施例中,所述直线驱动结构31为电动推杆,便于使用自动控制的场合。
74.一实施例中,所述直线驱动结构31设置多个,以对应在所述蜗舌2上多处位置发生形变,适应较复杂的工况。
75.一实施例中,沿所述蜗舌2的突伸方向上,所述蜗舌2具有与所述分流面相对的安装面,所述蜗舌2具有安载腔21,且在所述安装面侧设有开口,所述直线驱动结构31的驱动端自所述开口伸入至所述安载腔21内,将所述蜗舌2设置为一个壳结构,以使得所述直线驱动结构31在推拉时易产生对应的形变,便于实现自动控制。
76.所述蜗舌2在外界作用下需要较容易产生形变,一实施例中,所述蜗舌2的材质为柔性材质,同时考虑到用于吸油烟机1000等耐高温的场合,所述蜗舌2的材质可以设置为耐高温的高分子材料等等。
77.请参阅图5至图7,本发明提出的离心风机100包括离心风机的壳体结构以及转动安装于所述离心风机的壳体结构的安装腔内的离心风轮4,由于所述离心风机100包括上述离心风机的壳体结构的实施例中记载的全部技术特征,也因此具有上述离心风机的壳体结构的实施例中记载的全部技术效果,此处不在一一赘述。
78.请参阅图5,本发明中的离心风机100的推拉机构3是通过控制装置300实现自动调节的,一实施例中,所述离心风机100还包括监测装置200以及控制装置300,所述监测装置200用以监测所述离心风机100的工作参数,所述控制装置300电连接所述监测装置200,用以根据获得所述工作参数控制所述推拉机构3动作,根据不同的工况自动调节所述蜗舌2长度方向的深浅分布,便于实现自动化调整,提高用户体验。
79.不同的工作参数均可以反应所述离心风机100的工作状态,一实施例中,所述工作参数包括风机出风口流速参数、风机出风口静压参数、电机功率参数以及风轮转速参数中的至少一种,需要说明的是,在所述控制装置300根据获得所述工作参数控制所述推拉机构3动作中,所述动作参数可以是上述参数中的一种,也可以是任意的两种、三种等等的组合形式,以便全面反馈所述离心风机100的工作状态。
80.为了获得所述风机出风口流速参数,一实施例中,所述监测装置200包括设于所述
离心风机100的出风口处的流速测量装置,用以测量所述离心风机100的出风口处的流速,如此,可以很方便地获得所述离心风机100的出风口处的流速,进而可以很好地反应出所述离心风机100的工作状态。
81.测量所述离心风机100的出风口处的流速,可以采用机械式测速技术或者热线测速技术来快速测量,一实施例中,请参阅图8,所述流速测量装置包括第一风速管201,所述第一风速管201的总压孔2011用以相对所述离心风机100的出风口的气流设置,通过所述总压孔2011获得所述测速管上的气体总压pt,第一静压孔2012获得气体静压ps,通过对应的换算公式即可获得流经所述第一风速管201的气体流速,如此测量方式测量准确,需要说明的是,采用所述第一风速管201测量所述离心风机100出风口风速的方式在现有技术中有采用,此处不作详细的叙述。
82.所述离心风机100出风口处的风速的气流不均匀,布设所述第一风速管201测得的气流的流速不能较好地反应整个所述出风风道上的气体流动状态,一实施例中,所述离心风机100的出风口设有第一出风管205,所述第一出风管205内设有整流格栅202,所述整流格栅202用以将所述第一出风管205的内腔分隔成多个平行设置的管流道,所述第一风速管201处于所述整流格栅202背向所述离心风机100出风口的一侧,且对应其中之一所述管流道设置,通过所述整流格栅202的整流作用,气流在每一所述管流道内均匀分布,所述第一风速管201测得的局部气流的气体即可反应所述出风风道上整体的气体流速情况,具有较好的效果。
83.一实施例中,所述整流格栅202包括相互交错设置的多个格栅板,通过交错设置的格栅板,很方便地将所述第一出风管205的整体管路间隔成多个管流道。
84.为了获得所述风机出风口静压参数,所述监测装置200包括设于所述离心风机100的出风口处的静压测量装置,用以测量所述风机出风口静压参数,所述静压测量装置可以是通过微压差计测量,一实施例中,请参阅图9,所述静压测量装置包括设于所述离心风机100的出风口处的第二出风管206,所述第二出风管206内设有第二风速管207,所述第二风速管207的侧壁设有第二静压孔208,如此,可以很方便地获得所述第二风速管207内的静压,进而获得所述风机出风口静压参数。
85.当然,也可以采用上述的整流格栅202来对所述第二出风管206内的气流整流,使得气流在所述第二出风管206内均匀分布,所述第二风速管207测得的局部气流的气体即可反应所述出风风道上整体的气体流速情况,具有较好的效果。
86.为了获得所述电机功率参数,一实施例中,所述监测装置200包括功率监测装置,用以监测所述风轮的驱动电机的输出功率,如此,可以很方便地获得所述风轮的驱动电机的输出功率,进而可以很好地反应出所述离心风机100的工作状态。
87.监测所述风轮的驱动电机的输出功率,一实施例中,请参阅图10,所述功率监测装置包括电流传感器203,用以监测所述离心风轮4的驱动电机的电流,可以在所述驱动电机的母线上设置所述电流传感器203,直接获得所述驱动电机的电流,进而可以很方便地获得所述驱动电机的电机功率。
88.为了获得所述风轮转速参数,一实施例中,所述监测装置200包括转速监测装置,用以监测所述风轮的转速,如此,可以很方便地获得所述风轮的转速,进而可以很好地反应
出所述离心风机100的工作状态。
89.监测所述离心风轮4的转速,可以采用光电码盘测速法、霍尔元件测速法、漏磁测速法等等测速方式,一实施例中,请参阅图11及图12,所述转速监测装置包括反射光电测量装置204,所述反射光电测量装置204包括激光发射器2041、激光接收器2042以及反射片2043,所述激光发射器2041设于所述蜗壳1上,所述激光接收器2042设于所述蜗壳1上,所述反射片2043设于所述风轮叶片上,其中,所述激光发射器2041发出光线,经所述发射片反射后,被所述激光接收器2042接收,如此设置,可以精确地获得所述离心风轮4的转速。
90.本发明还提出一种吸油烟机1000,所述吸油烟机1000包括离心风机100,由于所述吸油烟机1000包括上述离心风机100的实施例中记载的全部技术特征,也因此具有上述离心风机100的实施例中记载的全部技术效果,此处不在一一赘述。
91.参照图13,图13为本发明离心风机出风控制装置的结构示意图。
92.如图13所示,该离心风机出风控制装置可以包括:处理器1001,例如cpu,通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display)、输入单元比如键盘(keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如wi-fi接口)。存储器1005可以是高速ram存储器,也可以是稳定的存储器(non-volatile memory),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
93.本领域技术人员可以理解,图13中示出的结构并不构成对离心风机出风控制装置的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
94.如图13所示,作为一种计算机存储介质的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及离心风机出风控制程序。
95.在图13所示的服务器中,网络接口1004主要用于连接终端设备,与终端设备进行数据通信;用户接口1003主要用于接收管理员的输入指令;所述服务器通过处理器1001调用存储器1005中存储的离心风机出风控制程序,并执行以下操作:
96.获取所述离心风机100的实际工作参数;
97.根据获得的实际工作参数、以及第一映射关系,获得实际调节参数,其中,所述第一映射关系为工作参数与调节参数之间对应的关联关系;
98.根据获得的实际调节参数,控制所述推拉机构3活动。
99.基于上述硬件结构,图14为本发明提供的离心风机出风控制方法的实施例。
100.请参照图14,在本实施例中,所述离心风机出风控制方法包括以下步骤:
101.步骤s10、获取所述离心风机100的实际工作参数;
102.需要说明的是,所述离心风机100的工作参数包括风机出风口流速参数、风机出风口静压参数、电机功率参数以及风轮转速参数等等,主要是通过监测装置200监控获得,如,风机出风口流速参数可以通过第一风速管201测量总压和静压,并通过对应的关系式获得,如,风机出风口静压参数可以直接测量得到,如,采用静压管或者第二风速管207直接测量,如,电机功率参数可以通过电流传感器203获取所述风轮的驱动电机上的母线电流即可获得,如,风轮转速参数可以通过转速测量装置测量。
103.步骤s20、根据获得的实际工作参数、以及第一映射关系,获得实际调节参数;
104.需要说明的是,所述第一映射关系为工作参数与调节参数之间对应的关联关系,是需要写入控制器的控制程序中的,对于一个特定的机型,有特定的对应关系,具体写入控制器的控制程序中的步骤包括:
105.获得所述离心风机100静压与风量对应的第二映射关系;
106.根据第二映射关系以及工作参数获得第三映射关系,其中,所述第三映射关系为工作参数与风量之间的对应的关联关系;
107.根据第三映射关系以及调节参数获得所述第一映射关系;
108.需要说明的是,对于某一特定的机型,对其进行空气性能测试时,即可获得静压与风量对应的第二映射关系,根据流量换算,得到工作参数与风量之间对应的关系即为第三映射关系,根据第三映射关系以及调节参数获得所述第一映射关系,此时以将所述调节参数与所述工作参数关联起来。
109.步骤s30、根据获得的实际调节参数,控制所述推拉机构3活动;
110.需要说明的是,获得了所述实际调节参数后,可以直接驱动所述推拉机构3活动,如,所述推拉机构3根据不同的工况对所述蜗舌2的深度进行调整,如,风机出口处阻力过大,所述蜗舌2处的气流流速较小,且由于排烟的需要,在保持风量的前提下要提升静压,以克服排烟阻力,此时,采用中间外突的蜗舌2,有利于气流的分流,及减少蜗舌2处的回流,并提升静压;风机出口处阻力适中,考虑风量和静压的综合需求,采用中间相对较平的蜗舌;风机出口处阻力过小,所述蜗舌2处的气流流速较大,高速气流会对所述蜗舌2冲击会产生高频的气动噪声,因此采用中间相对内凹的蜗舌,能够减少高速气流对所述蜗舌2的冲击,降低噪声。
111.本发明通过获取所述离心风机100的实际工作参数,根据获得的实际工作参数、以及第一映射关系,获得实际调节参数,根据获得的实际调节参数,控制所述推拉机构3活动,实现了自动根据所述离心风机100的工作状态,来驱动所述推拉机构3来调整所述蜗舌2活动,以适应不同工况下气流在所述蜗壳1的轴向上分布不均匀的情况,起到减少噪声、增大静压的效果。
112.一实施例中,在所述蜗舌2的突伸方向上,所述推拉机构3推拉所述蜗舌2,以使得所述蜗舌2具有中部位置外突的第一调整位置、中部位置内凹的第二调整位置以及处于所述第一调整位置和所述第二调整位置之间的过渡调整位置,所述第一映射关系为:
113.当所述工作参数满足第一预设条件时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第一调整位置;
114.当所述工作参数满足第二预设条件时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第二调整位置;
115.当所述工作参数满足第三预设条件时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述过渡调整位置。
116.本发明的实施例中,通过设置不同的预设条件,更精准地控制所述推拉机构3活动,更能适应不同工况下气流在所述蜗壳1的轴向上分布不均匀的情况,起到减少噪声、增大静压的效果,同时,也需要说明的是,所述第一调整位置、第二调整位置以及所述过渡位置不是一个绝对的位置,是一个调整范围。
117.需要说明的是,根据不同的工作参数,有不同的预设条件,以下以不同的工作参数
条件下,以不同的预设条件来驱动所述推拉机构3活动来说明:
118.1、当所述工作参数为风机出风口流速参数时,根据某一特定型号的离心风机100的控制实例如下(流速v单位m/s):
119.当v∈(0,8]时,所述风机出风口流速参数满足第一预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第一调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22外突的第一调整位置,在所述第一调整位置处,外突的具体突出量也需要进行精细调整;
120.当v∈(13.5,16]时,所述风机出风口流速参数满足第二预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第二调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22内凹的第二调整位置,在所述第二调整位置处,内凹的具体突出量也需要进行精细调整;
121.当v∈(8,13.5]时,所述风机出风口流速参数满足第三预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述过渡调整位置,即为处于所述第一调整位置和第二调整位置之间的位置;
122.2、当所述工作参数为风机出风口静压参数时,根据某一特定型号的离心风机100的控制实例如下(静压ps单位pa):
123.当ps∈[300,430)时,所述风机出风口流速参数满足第一预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第一调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22外突的第一调整位置,在所述第一调整位置处,外突的具体突出量也需要进行精细调整;
[0124]
当ps∈[0,150)时,所述风机出风口流速参数满足第二预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第二调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22内凹的第二调整位置,在所述第二调整位置处,内凹的具体突出量也需要进行精细调整;
[0125]
当ps∈[150,300)时,所述风机出风口流速参数满足第三预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述过渡调整位置,即为处于所述第一调整位置和第二调整位置之间的位置;
[0126]
3、当所述工作参数为电机功率参数时,根据某一特定型号的离心风机100的控制实例如下(功率p单位w):
[0127]
当ps∈[135,190)时,所述风机出风口流速参数满足第一预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第一调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22外突的第一调整位置,在所述第一调整位置处,外突的具体突出量也需要进行精细调整;
[0128]
当ps∈[240,255)时,所述风机出风口流速参数满足第二预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第二调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22内凹的第二调整位置,在所述第二调整位置处,内凹的具体突出量也需要进行精细调整;
[0129]
当ps∈[190,240)时,所述风机出风口流速参数满足第三预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述过渡调整位置,即为处于所述第一调整位置
和第二调整位置之间的位置;
[0130]
4、当所述工作参数为风轮转速参数时,根据某一特定型号的离心风机100的控制实例如下(转速r单位rms):
[0131]
当r∈[1350,1450)时,所述风机出风口流速参数满足第一预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第一调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22外突的第一调整位置,在所述第一调整位置处,外突的具体突出量也需要进行精细调整;
[0132]
当r∈[1100,1250)时,所述风机出风口流速参数满足第二预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述第二调整位置,即为在所述蜗舌2的突伸方向上,所述蜗舌2具有相对两个所述第二蜗舌段22内凹的第二调整位置,在所述第二调整位置处,内凹的具体突出量也需要进行精细调整;
[0133]
当ps∈[1250,1350)时,所述风机出风口流速参数满足第三预设条件,此时,控制所述推拉机构3活动,以使得所述蜗舌2处于所述过渡调整位置,即为处于所述第一调整位置和第二调整位置之间的位置。
[0134]
以上所述仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1