一种风量控制方法与流程
[0001]
本发明属于风力的控制技术领域,具体涉及一种风量控制方法。
背景技术:
[0002]
在风机的实际应用场合中,通常需要对出风量进行严格的控制,调节其电机转速是控制风量的唯一手段,电机转速越快风量越大,反之越小。由于风机的使用受风速、风向、空气流通量等因素的影响,电机转速与风机出风量在之前没有严格的一一对应关系,这使得风机风速的调节变得不可控,无法满足实际应用要求。
[0003]
目前,在风力发电领域也有一些与此相关的技术研究,如:cn101900080a、cn202157900u、cn102410138a等,解决系统控制的优化等问题,但要适用到对风机的风量调节上还需要进一步具体优化改进。
技术实现要素:
[0004]
针对现有技术的上述不足,本发明要解决的技术问题是提供一种风量控制方法,避免目前对风机的出风量控制调节所存在的问题,取得提高风机出风量可控性的效果。
[0005]
为解决上述技术问题,本发明采用如下技术方案:
[0006]
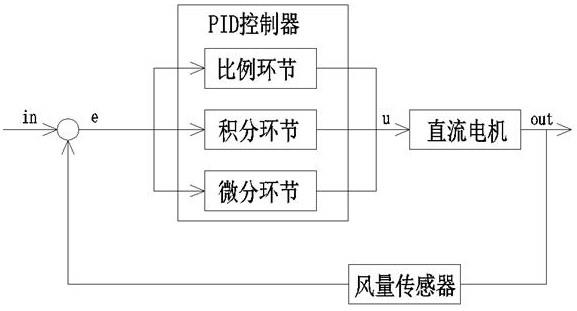
一种风量控制方法,通过控制系统单元控制风机的转速来控制风量;所述系统控制单元包括控制器、风机和风量传感器,所述控制器信号连接风机,所述风量传感器用于检测风机的实际输出风量,风量传感器信号连接所述控制器以反馈风机的实际输出风量;在设定的采样周期,控制器将预先写入的风量预设值与所述实际输出风量进行对比,若实际输出风量大于所述风量预设值,控制器输出并使风机转速降低,若实际输出风量小于所述风量预设值,控制器输出并使风机转速提高。
[0007]
实施时,可以采用plc控制器,结合风量传感器反馈的实际输出风量与风量预设值进行对比,通过控制电压的方式调节风机的转速,但控制出风量的稳定性不高。考虑进一步完善,控制器采用pid控制器,所述pid控制器包括比例环节、积分环节、和微分环节并通过对应的控制算法计算得到所述控制器输出。通过pid控制器不断调节,出风量会趋近于预设值,出风量更稳定,效果更好。
[0008]
进一步地,所述风机采用直流电机并用pwm调节转速。pwm调节为现有技术,此处不再介绍。
[0009]
进一步地,风量预设值为in(t),在设定的采样周期,实际输出风量为out(t),风量传感器将信息反馈给pid控制器,偏差量err(t)=in(t)-out(t),比例环节可使实际输出风量与风量预设值之间的偏差量向减小的方向变化,积分环节可使偏差量不断减小直至趋于0,微分环节可根据偏差量的变化趋势预先进行纠正,在偏差量变大之前提前修正。
[0010]
进一步地,采样周期为t,则在第kt时刻:
[0011]
err(k)=in(k)-out(k);
[0012]
积分环节以加和的形式表示为err(k)+err(k+1)+
……
;
[0013]
微分环节以斜率的形式表示为[err(k)-err(k-1)]/t;
[0014]
离散表示形式如下:
[0015][0016]
则u(k)可进一步表示成为:
[0017]
u(k)=k
p
(err(k)+k
i
∑err(j)+k
d
(err(k)-err(k-1)));
[0018]
进一步可得:
[0019][0020]
进一步可得:
[0021]
δu(k)=k
p
(error(k)-error(k-1))+k
i
error(k)+k
d
(error(k)-2error(k-1)+error(k-2));
[0022]
得到所述控制器输出,为增量式表示方式;pid控制器进一步处理后的最终输出作为输入量,传递给直流电机执行。
[0023]
相比现有技术,本发明具有如下有益效果:
[0024]
1、本发明的风量控制方法,将风机出风量调节这一难以处理的问题转换成风机转速调节这一可操作的具体问题,实现对风机出风量的控制,提高可控性,具体采用了控制风机风速的一种数学模型,风机的电机在某个转速下,若实际输出风量小于风量预设值,适当增加电机转速;若实际输出风量大于风量预设值,则适当降低电机转速,通过pid控制器不断调节,出风量会趋近于预设值;风机的控制程序配套上一个良好的数学模型,使这个过程自动进行,实现风机风速的自动调节。
[0025]
2、本发明的风量控制方法,通过pid控制器进行计算控制,过程反应迅速,风机一启动就能够快速调节风量。
[0026]
3、本发明的风量控制方法,算法简单明了,写入控制器即可实施,各个控制参数相对独立,易于掌握。
[0027]
4、本发明的风量控制方法,风量控制进程开始时强迫过程进行,控制过程结束时减小超调,可克服振荡,可靠性、稳定性好。
附图说明
[0028]
图1为具体实施例的一种风量控制方法的流程图。
具体实施方式
[0029]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0030]
请参见图1,具体实施例的一种风量控制方法,通过控制系统单元控制风机的转速来控制风量;所述控制系统单元包括控制器、风机和风量传感器,所述控制器信号连接风机,所述风量传感器用于检测风机的实际输出风量,风量传感器信号连接所述控制器以反馈风机的实际输出风量;在设定的采样周期,控制器将预先写入的风量预设值与所述实际输出风量进行对比,若实际输出风量大于所述风量预设值,控制器输出并使风机转速降低从而减小风量,若实际输出风量小于所述风量预设值,控制器输出并使风机转速提高从而
增大风量。
[0031]
其中,所述控制器采用pid控制器,所述pid控制器包括比例环节(p)、积分环节(i)和微分环节(d)并通过对应的控制算法计算得到所述控制器输出,控制信号对应输入至风机,控制实际输出风量趋近于风量预设值。所述风机采用直流电机。
[0032]
其中,风量预设值为in(t),在设定的采样周期,实际输出风量为out(t),风量传感器将信息反馈给pid控制器,偏差量err(t)=in(t)-out(t),比例环节可使实际输出风量与风量预设值之间的偏差量向减小的方向变化,积分环节可使偏差量不断减小直至趋于0,微分环节可根据偏差量的变化趋势预先进行纠正,在偏差量变大之前提前修正,控制信号发送给直流电机,直流电机采用pwm调节转速,通过调节占空比来改变转速,从而改变风量,搭载此系统的风机就可以实现对风量的自动调节。
[0033]
pid控制其实是不断缩小偏差的过程。如果偏差为0,则比例环节不起作用,只有存在偏差时,比例环节才起作用;积分环节主要是用来消除静差,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差;微分信号反应了偏差信号的变化规律,根据其偏差信息的变化趋势从而进行调节,使系统响应更快。
[0034]
将算法写入控制器(通过软件控制),即可以实施。
[0035]
将模型离散化,假设采样周期为t,则在第kt时刻:
[0036]
err(k)=in(k)-out(k);
[0037]
积分环节以加和的形式表示为err(k)+err(k+1)+
……
;
[0038]
微分环节以斜率的形式表示为[err(k)-err(k-1)]/t;
[0039]
离散表示形式如下:
[0040][0041]
则u(k)可表示成为:
[0042]
u(k)=k
p
(err(k)+k
i
∑err(j)+k
d
(err(k)-err(k-1)));
[0043]
由上述表达式可以得到:
[0044][0045]
进一步可得:
[0046]
δu(k)=k
p
(error(k)-error(k-1))+k
i
error(k)+k
d
(error(k)-2error(k-1)+error(k-2));
[0047]
得到所述控制器输出,是系统增量式表示方式,可以看出,增量式的表达结果只和最近三次的偏差有关,这样就大大提高了系统的稳定性。最终的输出为:u(k)+增量的调节值。
[0048]
具体使用时,要写入软件实施,为便于使用本方法,作进一步介绍,可采用c语言表达该离散模型。
[0049]
首先定义变量结构体,代码如下:
[0050][0051]
接下来初始化变量,代码如下:
[0052][0053][0054]
初始化变量中kp,ki,kd三个参数影响控制过程,这里设定它们初始值分别为0.2、0.01、0.2。
[0055]
编写控制算法,代码如下:
[0056][0057]
写入即可实施有效控制,通过风机转速的调节有效控制风机出风量。
[0058]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1