回转真空气缸改良结构的制作方法
[0001]
本实用新型涉及一种回转真空气缸改良结构,具体而言,是指以气源驱动之气缸,其内部回转件配合不同组件,经由气体导引配合回转信道和模块信道,使其驱动后能应用于吸盘和夹爪不同功能。
背景技术:
[0002]
一般习用的回转真空气缸,其内部结构特征在于回转轴表面周缘雕刻有一外螺纹,而用以容置该回转轴的本体内部,且雕刻有和该外螺纹相配合的一内螺纹,当回转轴配合一套合件设置于本体内部时,通过内螺纹与外螺纹相互啮合外,该套合件也间接限制该回转的轴向方位,其动源驱动该回转轴时,该回转轴的内螺纹受本体内部的外螺纹限制以及套合件限制,使该回转轴转换成直线运动;
[0003]
然而,前述习用结构仅能通过气缸进行像是15、45、90
…
等的固定角度,且仅为单一功能目的,若需达成像是夹爪、或是更为精密角度转动的功能目的,则须要额外增加相关零件进行配合,除了使体积增加之外,更让其成本提升,是故,其习用结构存在着调整不便、以及扩充不便的问题。
技术实现要素:
[0004]
本实用新型的目的是提供一种回转真空气缸改良结构,其本体上方配设有能位移的承载件,该本体设有能由外部导引气体至内部的第一回转信道、第二回转信道、及模块信道,该第一回转通道与该第二回转信道通连至该模块信道内,且该模块信道内设有回转件,该回转件向外延伸配设有吸盘组件,导引气体经过该第一回转通道与该第二回转通道配合该回转件的外侧驱动该吸盘组件进行回转后,再以该模块信道配合导引气体经过该回转件的内部使该吸盘组件进行吸放动作。
[0005]
本新型回转真空气缸改良结构的另一实施例,其本体上方配设有能位移的承载件,该本体更设有能由外部导引气体进入至内部的第一回转信道、第二回转信道、及模块信道,该第一回转通道与该第二回转信道通连至该模块信道内,且该模块信道内设有一回转件,且该回转件向外延伸配设有一夹爪组件,导引气体经过第一回转信道与第二回转信道配合该回转件的外侧驱动该夹爪组件进行回转后,再以该模块信道配合导引气体经过该回转件的内部使该夹爪组件进行夹放动作。
[0006]
本新型回转真空气缸改良结构的另一实施例,其第二目的在于该夹爪组件主要由活塞、弹簧、及爪片所构成,该活塞设于该回转件的外侧,该活塞连结有一对爪片,且该对爪片之间设有该弹簧,能受该模块信道配合导引气体经过该回转件产生位移后,进一步驱动该爪片配合该弹簧的弹性进行相对应的夹放动作。
[0007]
本新型回转真空气缸改良结构的另二实施例,其本体上方配设有能位移的承载件,该本体设有能由外部导引气体至内部的第三回转信道、及模块信道,该第三回转信道通连至该模块信道内,且该模块信道内设有回转件、及马达,该回转件向外延伸配设有一吸盘
组件,导引气体经过该第三回转通道配合该回转件的内侧驱动该吸盘组件进行吸取动作后,再以该马达驱动该回转件进行精密的角度转向动作。
[0008]
本新型回转真空气缸改良结构的另二实施例,其第二目的在于该回转件的可转向角度为1至360度。
[0009]
经由上述目的,能通过模块化替换本体内的少数零件,且不需额外进行过多加工制造步骤,即能依需求进行吸盘、夹爪、以及调整精细旋转角度的功能。
附图说明
[0010]
图1是本实用新型的立体图。
[0011]
图2是本实用新型于第1图的前视图。
[0012]
图3是本实用新型于第2图的a-a剖面视图。
[0013]
图4是本实用新型于第2图的b-b剖面视图。
[0014]
图5是本实用新型于第2图的c-c剖面视图。
[0015]
图6是本实用新型另一实施例的立体图。
[0016]
图7是本实用新型另一实施例于第6图的前视图。
[0017]
图8是本实用新型另一实施例于第7图的a-a剖面视图。
[0018]
图9是本实用新型另一实施例于第7图的b-b剖面视图。
[0019]
图10是本实用新型另一实施例于第7图的c-c剖面视图。
[0020]
图11是本实用新型另二实施例的立体图。
[0021]
图12是本实用新型另二实施例于第11图的前视图。
[0022]
图13是本实用新型另二实施例于第12图的a-a剖面视图。
[0023]
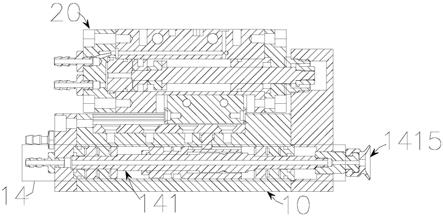
图14是本实用新型另二实施例于第12图的b-b剖面视图。
[0024]
图15是本实用新型本体的部份分解示意图。
[0025]
附图标记说明:
[0026]
(10)...本体
[0027]
(11)...第一回转通道
[0028]
(12)...第二回转通道
[0029]
(13)...第三回转通道
[0030]
(14)...模块信道
[0031]
(141)...回转件
[0032]
(1411)...夹爪组件
[0033]
(1412)...活塞
[0034]
(1413)...弹簧
[0035]
(1414)...爪片
[0036]
(1415)...吸盘组件
[0037]
(142)...马达
[0038]
(20)...承载件
[0039]
(30)...定位杆
[0040]
(40)...限位槽
[0041]
(41)...钢珠
[0042]
(50)...回转槽
具体实施方式
[0043]
通常根据本创作,该最佳的可行的实施例,并配合图式第1~5图详细说明后,为增加对本实用新型的了解;本实用新型为一种回转真空气缸改良结构,其包含有:
[0044]
请参阅如第1~5图所示,其为本新型另一实施例,其结构为:一本体10,其上方配设有能位移的一承载件20,该承载件20为此领域常见的结构,故而不再多加赘述其详细运作方式,该本体10设有能由外部导引气体至内部的一第一回转通道11、一第二回转通道12、及一模块信道14,前述各通道连接至本体10外部皆设有相对应的接头,且该第一回转通道11与该第二回转通道 12通连至该模块信道14内;
[0045]
首先,请先参阅第15图所示,为该本体10的部份分解示意图,该本体 10内部所设的模块信道14,主要用于设置该回转件141使用,当中,可见该回转件141由前、后两个构件所组成,其前端构件具有一回转槽50呈螺旋设置,而后端构件则设有一对钢珠41能配合嵌设于该回转槽50内,限制该回转槽50旋转的角度,而位于该模块信道14的信道内壁穿设有一定位杆30,该定位杆30配合穿设于该后端构件的限位槽40内,故当气体导引至该模块信道 14内时,则能带动该回转件141进行回转角度的动作,此处先行讲述关于回转件141如何进行转动的结构说明供其理解;
[0046]
再者,请详阅第2~5图,能理解各个通道非同平面设计,其剖面图需一并观看,故能知悉该第一回转通道11与该第二回转通道12通连至该模块信道 14内,且该模块信道14内部设有一回转件141,该回转件141向外延伸设有一吸盘组件1415,导引气体经过该第一回转通道11与该第二回转通道12配合该回转件141的外侧驱动该吸盘组件1415进行回转后,再以该模块信道14 配合导引气体经过该回转件141的内部使该吸盘组件1415进行吸放动作。
[0047]
再请参阅如第6~10图所示,其为本新型另一实施例,其结构具有:一本体10,其上方配设有能位移的一承载件20,其承载件20如同先前实施例一般,故不再详述,该本体10设有能由外部导引气体至该本体10内部的一第一回转通道11、一第二回转通道12、及一模块信道14,前述各通道连接至本体10 外部皆设有相对应的接头,该第一回转通道11与该第二回转通道12通连至该模块信道14内,且该模块信道14内部设有一回转件141,该回转件141向外延伸设有一夹爪组件1411,导引气体经过该第一回转通道11与该第二回转通道12配合该回转件14的外侧驱动该夹爪组件1411进行回转后,再以该模块信道14配合导引气体经过该回转件141的内部使该夹爪组件1411进行夹放动作。
[0048]
前述夹爪组件1411主要由一活塞1412、一弹簧1413、及一爪片1414所构成,而该活塞1412设于该回转件141的外侧,该活塞1412连结有一对爪片 1414,且该对爪片1414之间设有该弹簧1413,能受该模块信道14配合导引气流经过该回转件141产生位移后,进一步驱动该爪片1414配合该弹簧1413 的弹性进行相对应的夹放动作。
[0049]
前述另一实施例,基于主实施例将吸盘组件1415更替为夹爪组件1411,将原本吸放对象动作改为夹放动作,且仍可进行相对应的回转角度的功能,但此另一实施例驱动回转件141转动则利用回转件141上预设轨道进行固定角度的转动,故其灵巧性还有改善空
间。
[0050]
再请参阅如第11~14图所示,其为本新型另二实施例,其结构为:一本体10,上方配设有能位移的一承载件20,该本体10设有能由外部导引气体至内部的一第三回转通道13、及一模块信道14,该第三回转通道13通连至该模块信道14内,且该模块信道14内设有一回转件141、及一马达142,该回转件141向外延伸配设有一吸盘组件1415,导引气体经过该第三回转通道13配合该回转件141的内侧驱动该吸盘组件1415进行吸取动作后,再以该马达142 驱动该回转件141进行精密的角度转向动作,其中该回转件141的可转向角度为1至360度。
[0051]
前述另二实施例,主要将原有的模块信道14进行缩减调整后,于该本体 10内部装设该马达142,并以该马达142配合外部电性连接相关操控设备后,能以该马达142进行1至360度的回转角度,此外,也能将原有的第一回转通道11与第二回转通道12进行更动为第三回转通道13,让该本体10内部较为复杂的气体导引用的通道加以简化。
[0052]
综上所述,本新型回转真空气缸改良结构,通过本体10内部的数个回转通道与回转件141,进一步配合模块信道14和相对应的吸盘组件1415、夹爪组件1411、及马达142能进行功能的替换,相较于习用结构若需达成等效目的,来的更为轻松且快速。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1